集装箱自动化码头AGV—NS研究
2016-04-26 22:42袁理松
科技视界 2016年10期
袁理松

【摘 要】集装箱自动化码头AGV-NS技术研究取得了很好的成果,本文针对某一港口开发了AGV-NS以适应自动化码头的工作对精确导航的要求。
【关键词】AGV;AGV-NS;磁钉导航
1 AGV-NS概述
自动导向车AGV[1]是现代物流系统自动化、柔性化及智能化的关键设备,研究AGV的相关技术意义重大。导航系统为AGV核心组成部分,目前常见的AGV导航方式主要有视觉导航、激光导航与磁导航[2],视觉导航由于易受环境影响其适应性差,激光导航的硬件成本较高,磁导航则不仅控制简单[3]、成本低、且抗干扰能力强,可在各种环境下工作,应用最为广泛[4]。
1.1 视觉导航
在视觉导航技术中,目前应用最普遍的是在AGV上安装CCD摄像头的基于局部视觉的导航方式[5]。摄像机有垂直安装与倾斜安装两种方式[6]。垂直安装方式定位精度比较高,但视野相对较小,若车体摆动幅度过大,路径容易脱离视野。倾斜安装方式由于采集的图像存在倾斜畸变,对其进行校正插值后,精度没有垂直安装方式的高,但能够获得更大视野,另外也能检测前进方向上是否存在障碍物,以便及时停车或进行避障。
1.2 激光导航
激光导航是AGV系统中比较常见的导航方式,也是AGV发展过程中十分重要的一项技术[7]。除了卫星定位系统外,激光导引也是唯一不用地面处理的导引方式。激光导引AGV系统主要由AGV激光扫描器和AGV反射板两部分组成[8]。首先在AGV设备中安装可以接受和发射激光的扫描器,然后将AGV反射板安装在导引区的四周,之后精确测量每块发射板的坐标位置,在AGV系统的存储器中存储每块反射板的信息,根据存储数据进行导引计算。激光导引系统中的指定区域应该设置一定数量的反射板,保证在AGV的工作区域内探测出所有反射信息。
1.3 磁导航
磁导航是指在运行路线上安装磁条,AGV行驶时,依靠磁传感器检测磁场强度的变化,以确定当前AGV与导引带的相对位置,再由控制器纠正其位置偏差,使AGV沿预定路线行驶。
2 集装箱自动化码头AGV-NS需求分析
本文所设计的AGV应用背景为集装箱自动化码头中集装箱的运输,结合青岛港集装箱自动化码头的实际工况,对AGV有以下要求:
(1)能够沿着预定的路径进行自主导航,具有一定导航精度;
(2)能够自主判断位资信息,在不同位置之间完成行驶与停靠,具有一定的定位精度;
(3)能够与上位机实时通信,接收上位机传递的任务信息以及接受远程监督与控制;
(4)具有多级安全保护装置,能够对障碍物进行自主判断;
(5)具有手动/半自动/自动等运行模式;
(6)能够判断自身状态,具有急停、报警等功能;
(7)路径要求变更容易,且AGV能够适应复杂路径;
(8)能够自动判断电池电量信息,在低电状态下能够自主到充电站完成充电动作。
根据以上要求,本文自主研制了一款磁钉导航AGV。
3 集装箱自动化码头AGV-NS
3.1 AGV-NS的实现原理
AGV自动导航系统的任务是实时根据VMS(车辆管理系统)路径指令,检测计算获得AGV的位姿信息,通过导航算法控制AGV沿规划路径自动运行及定位。
位姿信息包括AGV中心的绝对坐标以及AGV的方向角,如图1所示。准确获得位姿信息是AGV自动运行的基础,直接决定了AGV运行的精度和安全性。
导航系统采用天线——磁钉(transponder)系统测量AGV的绝对位置信息。这一系统首先需要在AGV的运行场地中布置磁钉,每一个磁钉都记录着其在堆场坐标系中的绝对坐标。在AGV底盘的前端和后端,对称安装一对检测天线。天线在覆盖磁钉时可以测量磁钉相对于天线的位置,同时读出磁钉在堆场中的绝对位置。这样,当AGV上两块天线能同时检测到磁钉时,就可以直接计算出AGV的位姿。在这一工况下,导航定位的精度完全由天线的检测精度决定,导航系统可获得很高的精度。
在不满足上述工况时,仅通过天线——磁钉系统将不能获得AGV的位姿,需要进行位姿估算才能完成导航定位。位姿估算基于AGV的运动学模型,并综合更多的传感器信息,包括惯性测量传感器(陀螺仪及加速度计)、车轮转速编码器、转向角编码器,进行信息融合后计算出AGV的位姿信息。在这一工况下,估算的误差主要由AGV模型与实际车辆的误差决定,并且估算的误差可能随着时间增长而不断增加。
在AGV实际的运行中,导航系统将在上述两种工况中交替运行,AGV位姿的估算误差也会不断波动,通常导航定位的总体精度由位姿估算算法决定。因此,需要着重优化位姿估算算法的性能,保证导航的误差不超过预定的误差指标。
3.2 AGV-NS的实现方法
在各种工况下,导航系统的定位误差不超过20mm。输出位姿信息的频率不低于20Hz,可以完全满足运动控制系统的需求。
自动导航系统根据AGV位姿信息,可以控制AGV沿指定路径进行运输任务。AGV的基本运行路径包括:直行、斜行、窄转窄转弯(由窄车道转向窄车道)、窄转宽转弯、宽转窄转弯和宽转宽转弯。将上述基本运行方式组合起来,可以形成更复杂的路径,如U型转弯和S型转弯,保证了AGV在堆场中的灵活运行。
3.3 AGV-NS系统构架
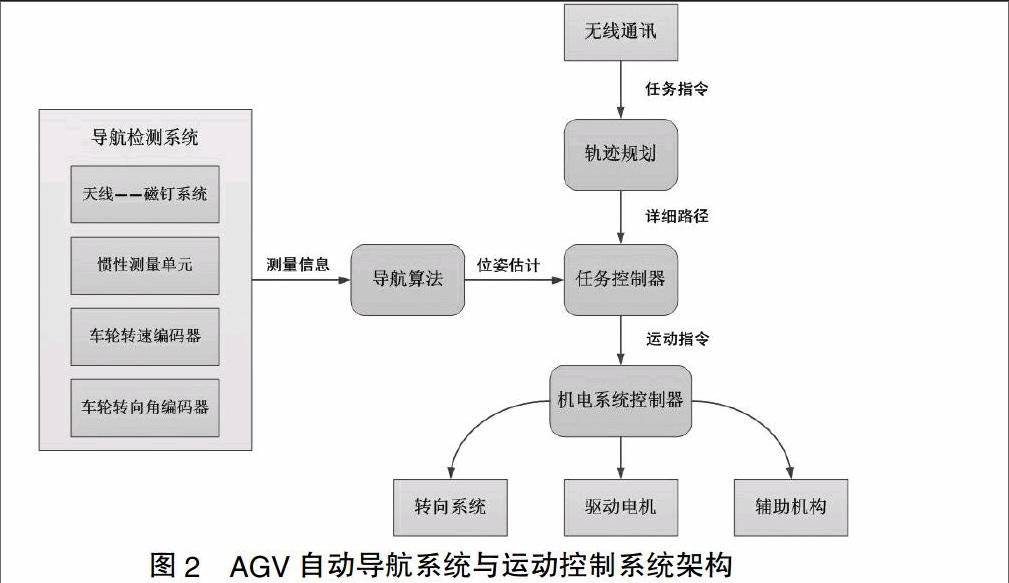
自动导航系统由导航检测系统和导航控制系统组成,二者缺一不可。从信息处理的角度,AGV自动导航系统与运动控制系统的构架如图2所示。
导航算法构成了导航控制系统软件部分的主体。可见该算法需要处理三种不同的工况。除前后天线同时检测到磁钉的工况外,都需要采用位姿估算算法进行导航。
位姿估算采用了扩展Kalman滤波器(Extended Kalman Filter, EKF)算法作为核心算法,对各传感器测量值进行信息融合,最终得到位姿估算输出。
4 结论
利用多个传感器信息,进行相互校正。特别是对于IMU中的陀螺仪,采用静态或动态零速修正技术可以显著修正其漂移误差。不同工况进行转换时,对估算算法进行平滑切换,可以防止估算误差突然恶化。预估模型是保证EKF算法性能的关键因素。在预估模型的设计中,充分考虑多种误差因素,使其更好地匹配实际AGV的运行特性。
本文开发的AGV-NS可以很好的满足自动化码头对AGV导航的高要求。
【参考文献】
[1]武启平,金亚萍,任平,等.自动导引车(AGV)关键技术现状及其发展趋势[J].制造业与自动化,2013,35(5):106-109,121.
[2]姜涌,曹杰,杜亚玲,等.基于各种传感器的自动导引车的制导方式[J].传感器技术,2005,25(8):1-4.
[3]彭光清,楼佩煌.磁导航 AGV 模糊控制器的研究[J].工业控制计算机,2012,25(9):43-44.
[4]郑炳坤,赖乙宗,叶峰.磁导航AGV控制系统的设计与实现[J].专题研究,文章编号: 001-9944(2014)03-0006-05.
[5]章植栋.AGV视觉导航技术与路径规划[J].长安大学,013.
[6]喻俊,星,伟良.Mecanum轮的全向运动视觉导引AGV研制[J].机械设计与制造工程,2015,44(9):35-39.
[7]李乐军,业琼,韦宝秀.关于AGV及其在中国的应用发展探析[J].科技资讯,2007(34).
[8]张毅,罗元,郑太雄.移动机器人技术及其应用[D].北京:电子工业出版社,2007.
[责任编辑:汤静]