基于红外线传感器的智能寻迹小车设计
2016-04-27 03:03赵旭东魏慧竹李曦
四川水泥 2016年10期
赵旭东 魏慧竹 李曦
(沈阳理工大学 辽宁沈阳 110159)
基于红外线传感器的智能寻迹小车设计
赵旭东 魏慧竹 李曦
(沈阳理工大学 辽宁沈阳 110159)
本文介绍了一种基于51单片机的小车寻迹系统。该系统采用两组高灵敏度的光电对管,对路面黑色轨迹进行检测,并利用单片机产生PWM波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。
智能小车;光电对管;寻迹;脉冲宽度调制
0 前言
智能车即轮式移动机器人,是一种集环境感知、决策规划、自动行驶等功能于一体的综合智能系统、智能车集中地运用了自动控制、模式识别、传感器技术、汽车电子、电气、机械等多个学科的知识。随着控制技术、计算机技术和信息技术的发展,智能车在工业生产和日常生活中已经扮演了非常重要的角色,今年来,智能车在野外、道路、生产制造中有着广泛的应用,已经成为人工智能领域研究和发展的热点。目前,智能车领域的研究已经能够在具有一定标记的道路上为司机提供辅助驾驶的功能,这些智能车的设计通常依靠特定的道路标记完成识别,进行行驶0。本文所设计的智能小车硬件部分主要由单片机控制模块、驱动转向模块等组成,软件部分主要又C语言编写实现的0。
1 系统方案设计
整个电路系统分为检测、控制、驱动三个模块。首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。系统方案方框图如图1所示。

图1 智能小车寻迹系统框图
当电路接通电源时,由小车主板的稳压电源电路稳定输出5 伏电压为小车下部的光探测电路提供电源使二极管发光,当路面是白色时,二极管发出的光大部分被反射,光敏电阻就接收到比较强的光照射,阻值变小,流过光敏电阻的电流变大。由于电阻的分压作用,使得光敏电阻的输出电压较小,约为1.5V 左右。当路面是黑色时,由于黑色对光有吸收作用,
使得二极管发出的光大部分被吸收,只有小部分被反射,光敏电阻接收到的光照就比较小,阻值变大,流过光敏电阻的电流变小,光敏电阻的输出电压变大,约为2.5V 左右。共有五个光敏电阻也就是有五个数据输出。这五个信号通过数据线与单片机的PA 口相连,最左边的电阻连接PA 口的最低位PA0,依次类推,一直连到PA4 口。
2 硬件设计
关于智能车的硬件的设计主要包括:传感器、单片机、电机驱动单元、电机速度控制;各个部分的具体选型如下:
传感器:市场上用于红外探测法的器件比较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了 ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单。ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
单片机:单片机是整个小车运行的核心部件,起着控制小车所有运行状态的作用。由于51单片机具有价格低廉、使用简单的特点,这里选择了ATMEL公司的AT89S51作为控制核心部件,当小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口有信号变化,程序就进入判断程序,把相应的信号发送给电动机从而纠正小车的状态。
电机驱动单元:从单片机输出的信号功率很弱,即使在没有其它外在负载时也无法带动电机,所以在实际电路中我们加入了电机驱动芯片提高输入电机信号的功率,从而能够根据需要控制电机转动。根据驱动功率大小以及连接电路的简化要求选择L298N。一块L298N芯片能够驱动两个电机转动,它的使能端可以外接高低电平,也可以利用单片机进行软件控制,极大地满足各种复杂电路需要。另外,L298Nde驱动功率较大,能够根据输入电压的大小输出不同额电压和功率,解决了负载能力不够这个问题。
车速的控制:车速调节的方法有两种:一是用步进电机代替小车上原有的直流电机;二是在原有直流电机的基础上,采用PWM调速法进行调速。考虑到机械装置不便于修改等因素,这里选择后者,利用单片机输出端输出高电平的脉宽及其占空比的大小来控制电机的转速,从而控制小车额速度。经过多次试验,最终确定合适的脉宽和占空比,基本能保证小车在所需要的速度范围内平稳前行。

图2 硬件总体设计框图
3 软件设计
该智能小车在画有黑线的白纸 “路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。其软件系统框图如下图3所示。
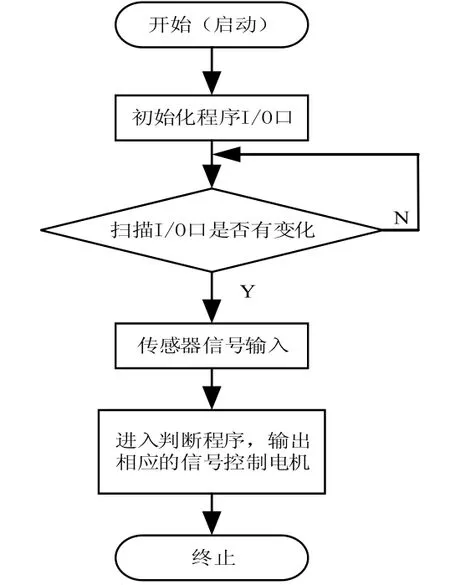
图3 软件系统框图
小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口有信号变化,程序就进入判断程序,把相应的信号发送给电动机从而纠正小车的状态。
4 结语
此方案选择的器件比较简单,实际中也很容易实现。经过多次测试,结果表明在一定的弧度范围内,小车能够沿着黑线轨迹行进,达到了预期目标。不足之处,由于小车采用直流电机,其速度控制不够精确和稳定,不能实现急转和大弧度的拐弯。
[1]徐友春,王荣本,李兵,李斌.世界智能车辆近况综述[J].汽车工程,2001,05: 289-295.
[2]万亮.智能小车运行控制系统的研究[J].电子制作,2014,12:58-59.
[3]姚佳.智能小车的避障及路径规划[D].东南大学,2005.
TU7
B
1007-6344(2016)10-0042-01
赵旭东(1995.12--)男,北京市人,本科学历,专业:电子信息科学与技术。
魏慧竹(1995.03-)女,辽宁省沈阳市人,本科学历,专业:电子信息工程。
李曦 (1997.02--)女,辽宁省沈阳市人,本科学历,专业:计算机科学与技术。
猜你喜欢
快乐语文(2020年36期)2021-01-14
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
科学大众(2020年17期)2020-10-27
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
山西青年(2017年8期)2017-01-31
电子设计工程(2015年15期)2015-02-27