FANUC 0i—mate数控机床参数全清后关于报警号5136的处理方法
2016-05-06 17:13韩川
山东工业技术 2016年9期


摘 要:本文提供了一种FANUC 0i-mate机床参数全清后关于报警号5136修改参数1023后无效的处理办法。从而对实践教学提供了一定的参考。
关键词:FANUC;机床参数;报警号
DOI:10.16640/j.cnki.37-1222/t.2016.09.031
数控专业学生在进行数控机床装调实训时,不免会反复对数控系统进行参数的加载。每次加载后都必须对整个数控系统进行一次上电全清的的操作,消除前面对系统参数的修改,回复到初始值。学生在进行上电全清后会出现各种报警信息,那么首要任务就是处理完报警信息,使数控机床能正常运转。本文主要介绍FANUC 0i-mate数控车床上电全清后出现的几种报警号的处理办法和关于报警号SV5136修改参数1023无效的处理办法。
1 数控系统上电全清的操作步骤
(1)上电前同时按住MDI面板上的RESET+DELEFE。
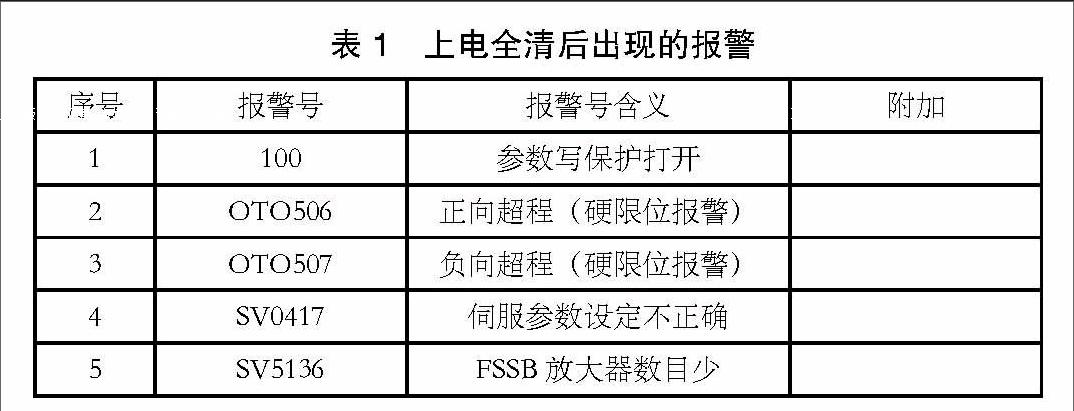
(2)接通数控系统电源,在出现一段对话后选择YES=1,系统就会进行上电全清操作。全清后就会出现各种报警信息,现截取部分报警信息如表所示:
2 主要报警号的消除
数控系统上电全清后,界面会变成全英文状态,不方便学生读取信息。所以首先就是将语言改为中文。然后针对每个报警号进行逐一消除:
(1)100号报警是参数写保护打开,可以按MDI面板上的RESET进行消除。
(2)OTO506号报警是正向超程(硬限位报警)查阅参数3004# 5,OTH位表示是否进行超程信号检查。修改前3004# 5=0,修改后3004# 5=1,同理报警号OTO507也是这样处理。断电重启数控系统发现OTO506、OTO507报警号消除。
(3)SV0417号报警是数字伺服系统异常,主要跟参数2022、参数2023、参数2024.参数2022表示电机旋转方向(111为顺时针旋转、-111为逆时针旋转),参数2023表示电机每转的速度反馈脉冲数、参数2024表示电机每转的位置反馈脉冲数。修改方法如表2。
(4)SV5136报警号的信息是FSSB放大器数目不足,主要跟参数1023有关。参数1023是各轴伺服号设置,实际在操作的时候一般将其参数设为X:1、Z:2,然后断大电1分钟再开启,报警号SV5136就能消除。不过在教学的过程中间有好多次都遇上修改完参数1023,报警号SV5136报警信息依然存在的情况。查阅维修手册,发现手册上对报警SV5136报警信息是这样解释的:
1)光缆或伺服放大器,可能是由于所识别的最后一个放大器与后面的放大器中间的连接光缆不良所致。也可能是由于该光缆连接的两末端的某个放大器不良所致。
2)伺服放大器的电源异常,如果伺服放大器的电源发生异常,也会发生此报警。针对上述所描写的现象我们对主柜的接线进行了详细的检查,发现无误,同时也对伺服放大器电源进行了确认。最后发现出现下面情况SV5136报警信息都会存在:伺服器未接电机,同时参数1023X设为1、Z设为2后,报警号SV5136无法消除。原因就在于学生在进行辅柜接线后,为了保证安全伺服电机一般是不接上系统的。而这时候学生将参数1023参数1023X设为1、Z设为2后,系统默认有电机信号介入进来,但是实际中伺服电机并未接入。导致系统检测不到电机信号,从而报警号仍然存在。
解决办法有2种:
1)上电全清后将参数1023的X、Z都设为-128如表3
2)上电全清后,确认安全接上伺服电机修改参数1023为(如表4)。
断大电1分钟后启动系统,报警信息SV5136将消除。
本文主要介绍了FANUC 0i-D数控机床参数全清后出现报警号及如何消除的主要方法,特别是对SV5136的报警号由于没接伺服电机造成的问题做了详细说明和解决方法。由于笔者所采用的是FANUC 0i-D数控机床,对于不同的FANUC系统可能出现的报警号有所不同,但是基本都可以归结于两类;超程报警、伺服非法以及轴的设定。消除了以上的主要报警号以后可能还会有其他的报警信息,归结起来也是有以下几类:轴的初始化,伺服初始化,主轴初始化。解决了以上的的问题基本大部分报警信息已经消除,但是还会有一些其他的报警,比如回参考点的设置就需要查手册,逐一排查。当所有报警信息解决后机床就可以正常运行了。
参考文献:
[1]FANUC 0i-D机床参数全清手动回复机床运行方法[A].科技咨询,2013,10(a).
[2]周兰,陈少艾.数控系统连接调试与PMC编程[M].北京:机械工业出版社,2012.
[3]FANUC株式会社.FANUC Series 0i Mate-Model D参数说明书[S].
[4]FANUC株式会社.FANUC Series 0i Mate-Model D维修说明书[S].
作者简介:韩川(1986-),男,湖北广水人,助教,研究方向:数控机床维修与装调。