基于跟踪微分器的磁浮列车定位测速系统信号处理问题研究
2016-05-08 02:27窦峰山何洪礼谢云德
铁道学报 2016年1期
窦峰山, 何洪礼, 谢云德, 何 宁
(国防科学技术大学 机电工程与自动化学院, 湖南 长沙 410073)
高速磁浮列车采用的绝对定位与相对定位相结合的定位测速技术在列车运行控制中起到了关键作用,其高精确性和高可靠性得到了实际验证[1-2]。高速磁浮列车长定子是由定子模块拼接而成,存在许多不均匀的接缝。这些接缝的存在使传感器的被测导体面为一个不连续的检测面,破坏了传感器线圈在轨道上方运动时的电感分布规律,增加了定位测速系统的检测难度[3-4]。当相对位置传感器经过接缝时,其输出信号将产生畸变,畸变的信号会影响牵引系统正常工作,有可能导致牵引设备过流或过压保护,甚至是烧毁牵引设备,造成安全事故[5]。由于接缝的尺寸不同,其对相对位置传感器输出的相角信号影响不同。因此必须采用方法消除轨道接缝对位置检测产生的影响,解决定位测速系统的过接缝问题。
目前,定位测速系统是在磁极相角处理单元(PRW)中采用自适应滤波及传感器冗余的方法解决这一问题[3-4]。但是由于自适应滤波方法需要大量的历史数据,计算复杂,对处理器的存储空间和运算能力具有较高要求,因此有必要提出新的方法更好的解决过接缝问题。针对上述问题,本文将研究应用跟踪微分器在PRW中解决传感器过大、小接缝的问题。
1 基于同步牵引的磁浮列车定位测速原理
相对位置传感器的主要功能是输出列车的相对位置、相位、速度和方向信息。目前,高速磁浮列车主要采用电感式变磁阻相对位置传感器。相对位置传感器在齿槽上方运动时,受长定子齿槽结构的影响,磁路的等效磁阻发生周期变化,相应的传感器线圈的等效电感发生变化,通过检测线圈的电感变化,从而准确获取列车的位置等信息[5-8],其工作示意图见图1。
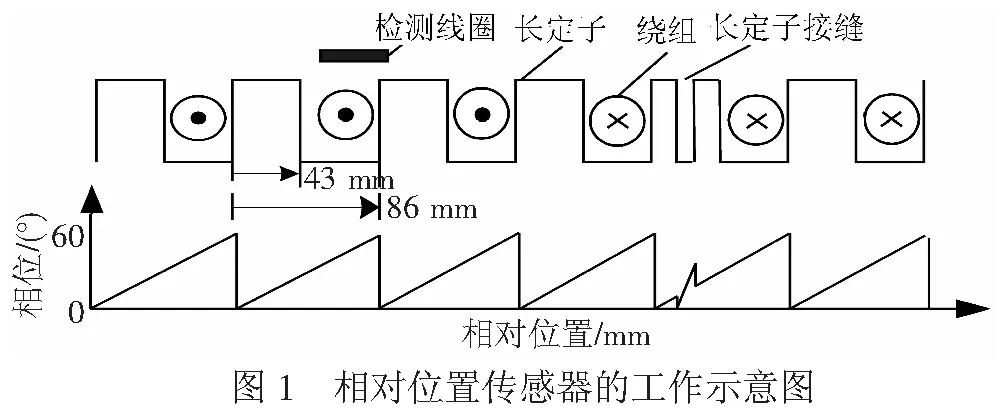
相邻轨道梁间的接缝,使得相对位置传感器在经过图1所示的长定子接缝时输出的磁极相角信号存在畸变,而且不同长度的接缝导致的信号畸变情况也不同,见图2。
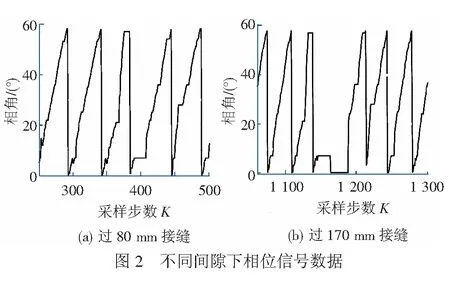
对于过小接缝的情况,由于相角信号仅是波形发生畸变,齿槽数仍是正常的,因此只需将其当作一般的干扰信号,采用滤波算法将波形畸变消除即可,无需判断是否过接缝。
对于过大接缝的情况,由于相角信号不仅波形畸变而且发生齿槽数漏数,已无法通过简单的滤波消除畸变,因此需要首先检测信号,判断其是否到达接缝,然后采取一定的措施消除畸变和修正齿槽数。
2 新型跟踪微分器建模
根据实际需要设计如下新型快速非线性跟踪微分器(NHSTD)
( 1 )
式中:R、a、b大于零;β、γ为线性区调节参数
( 2 )
函数G(z)可以实现跟踪微分器非线性区与线性区的光滑切换,使微分器(1)在远离目标点时能够迅速收敛,且接近目标点时无颤振现象。
由于在定位测速系统中,微分器需要处理的相位信号是离散数据,因此有必要给出微分器的离散形式。本文采用文献[9]中提出的微分器离散方法。NHSTD的离散化形式为
( 3 )
式中:T为采样时间;
u(k)=R2{aG(β[x1(k)-v(k)])-bG(γx2(k)/R)}
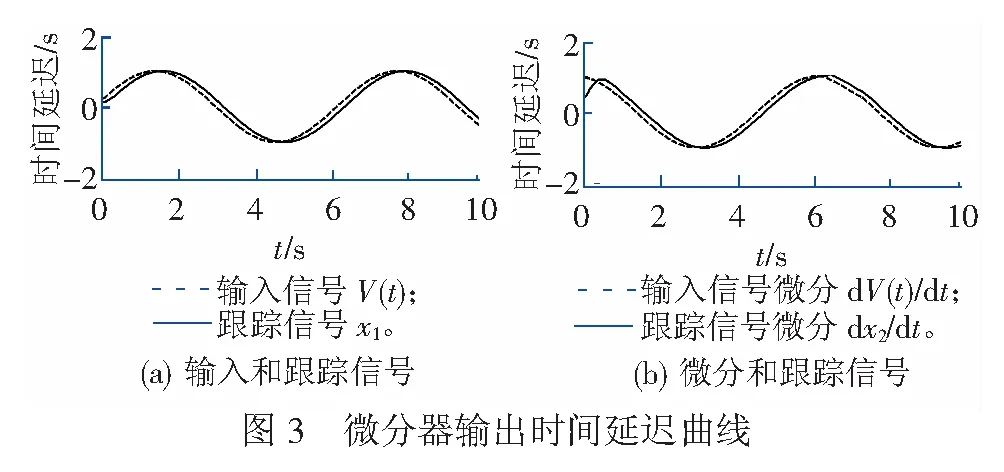
NHSTD不仅收敛速度快,同时还具有形式简单、计算量小、精度高的特点,这对于对实时性要求较高的定位测速系统非常有意义。当对输入信号进行跟踪和提取微分时,由于时间尺度参数R为有限值,因此微分器的输出相对于输入存在时间延迟,见图3。
文献[10]针对τ未知的情况提出了一种基于微分器组的时延补偿算法,消除τ的影响最终实现时延补偿。本文即利用微分器组的方法实现时延补偿。其框图见图4。

补偿效果见图5。
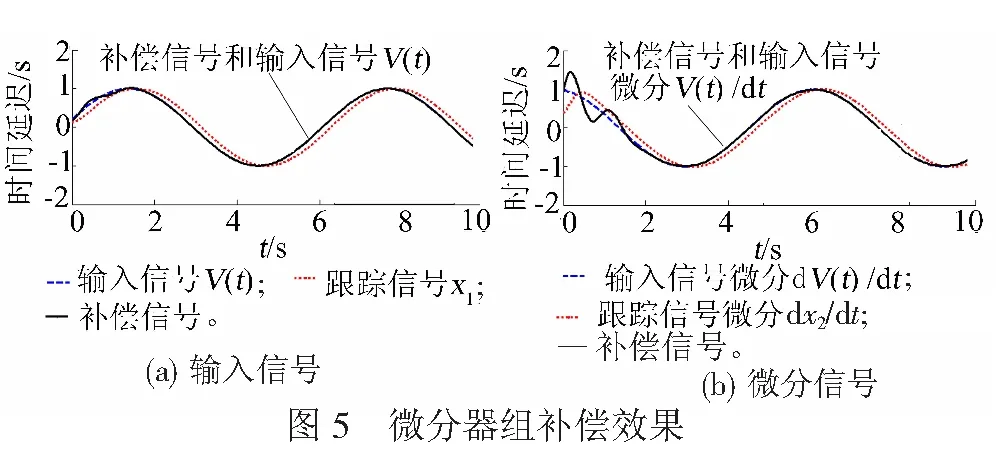
由图5可见,采用微分器组补偿算法,除了在初始阶段由于初始点的选取问题导致补偿后的输出存在较大误差外,其余时刻的补偿效果非常显著,最终输出的补偿跟踪信号和微分信号与实际的输入信号及其微分信号基本不存在时延。
3 过小接缝的信号滤波处理方法
3.1 锯齿波处理
高速磁浮列车定位测速系统信号处理单元接收到来自相对位置传感器的60°相角信号和齿槽数信号后将其转换为360°磁极相角发送给牵引系统。跟踪微分器能够有效跟踪频带范围内的信号,对于超过频带范围的信号迅速衰减。锯齿波相角信号包含丰富的高频谐波分量,且属于有用的位置信号,对其滤波会不同程度造成波形失真,尤其是锯齿波的下降沿部分将会被光滑处理[11]。
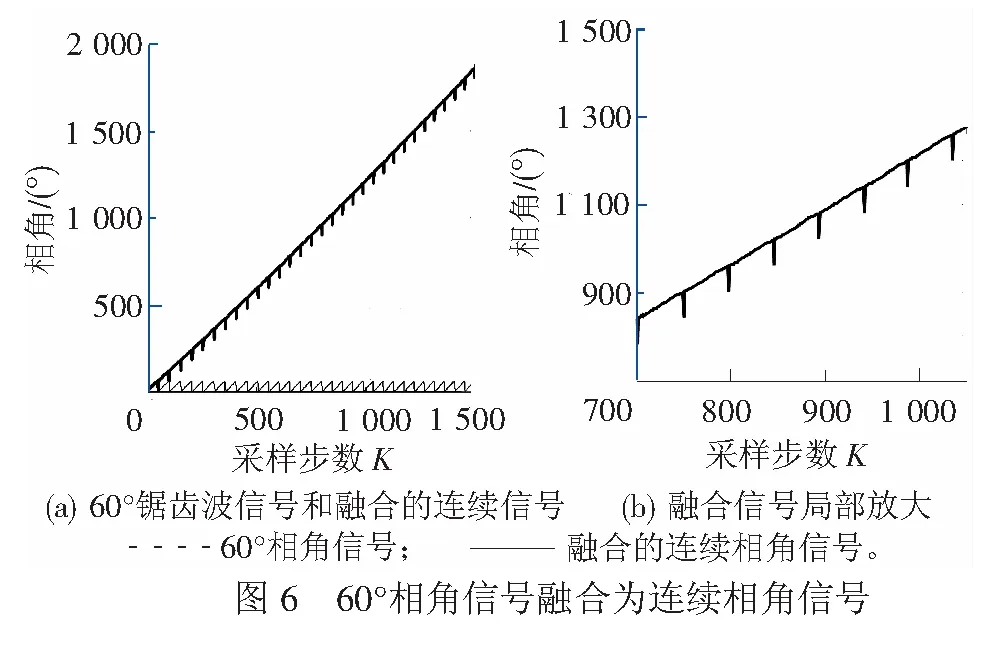
为避免这一问题的出现,将来自相对位置传感器的60°相角信号和齿槽数信号进行融合,将其转化为连续的斜坡信号,见图6。
3.2 脉冲干扰信号处理
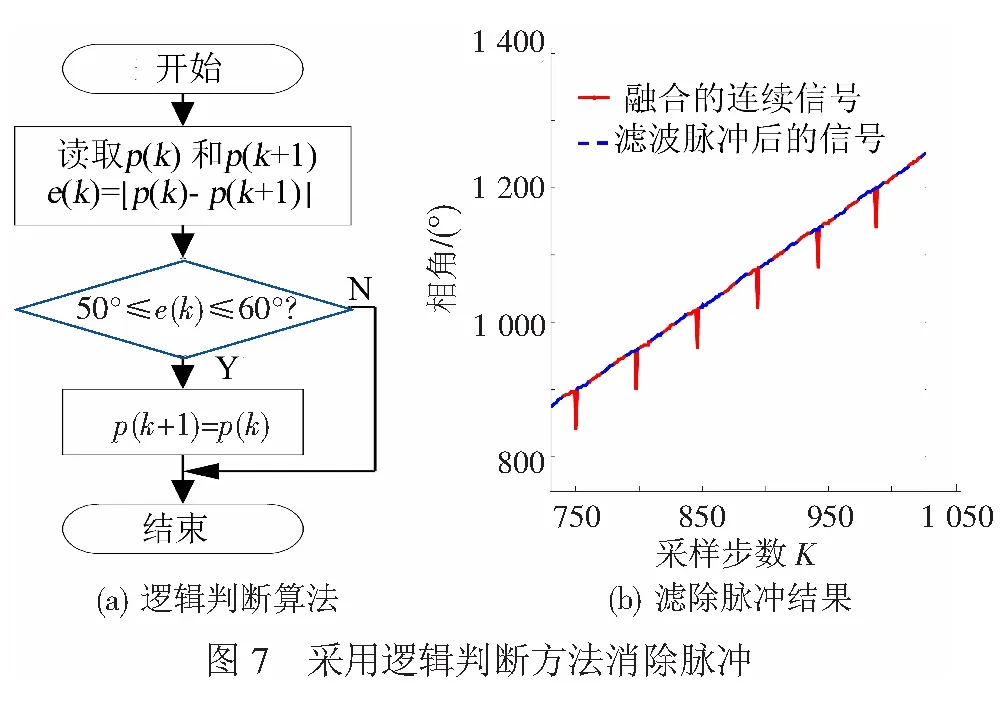
由图6可以看出,虽可以将60°相角信号转化为牵引系统所需的360°连续的磁极相角,但仍存在周期性的脉冲干扰。由于脉冲跳变均为60°左右,因此可通过简单的逻辑判断将其消除,见图7。
3.3 滤波处理
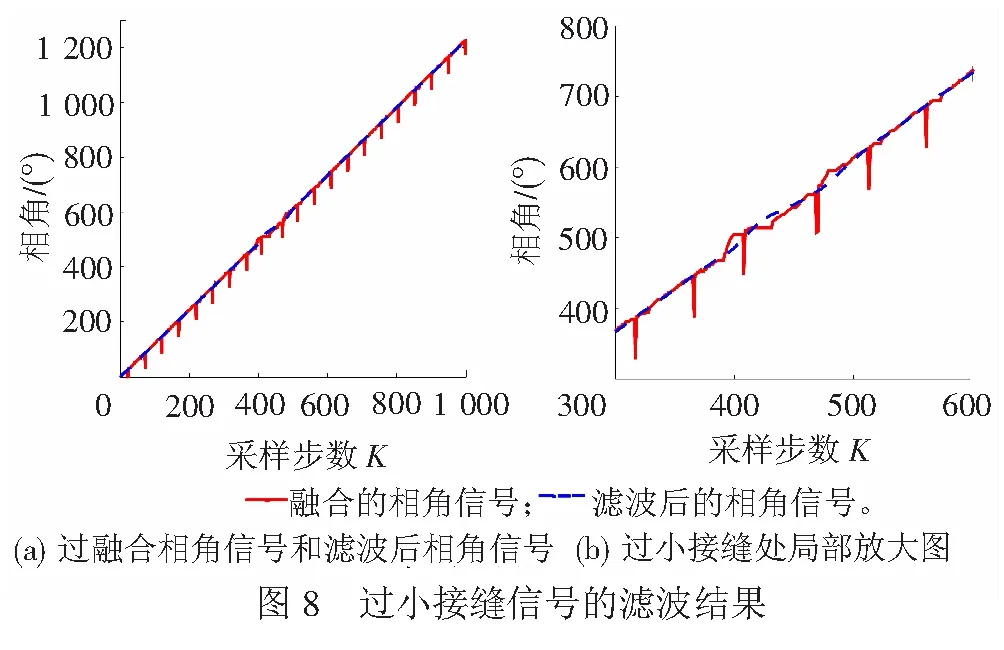
在信号处理单元中,分别将两路相对位置传感发送的60°锯齿波相角信号融合为连续的磁极相角信号,并采用上述逻辑判断方法滤除相角信号与齿槽数信号不同步导致的脉冲干扰,然后利用上文提出的跟踪微分器及其补偿算法对其进行滤波,见图8。
由于定位测速系统需要向牵引系统发送的是360°的磁极相角信号,因此对连续的融合相角信号进行滤波后需将其恢复成360°的锯齿波磁极相角信号,方法是将滤波后的连续相角信号除以360°,取其余数即可得到锯齿波信号。另外为了便于与原始信号对比,同时也将滤波后的连续相角信号恢复为60°锯齿波相角信号,见图9。
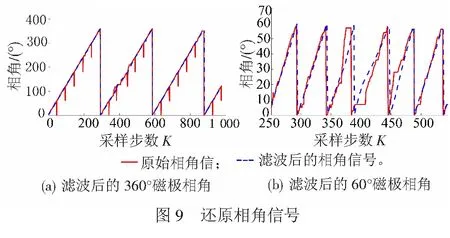
采用本文提出的新型跟踪微分器及相应的补偿算法对过小接缝的相角信号进行滤波,其滤波效果非常显著。该方法不仅能够对正常相角信号存在的干扰进行滤波,同时还能对过小接缝时严重畸变的相角信号进行恢复,可有效满足高速磁浮列车牵引及运行控制系统对位置信号的精度及可靠性要求。
4 基于传感器冗余的过大接缝切换算法
当相对位置传感器过大接缝时,其输出的相位信号存在严重的畸变和齿槽漏数现象。由于同一套定位测速系统包含两个相对位置传感器,二者安装于轨道同一侧,且相距3个完整的齿槽周期,大于接缝的最大宽度,保证了两只传感器在先后通过长定子轨道接缝时,不会同时受到影响。两路相对位置传感器过大接缝时,会依次出现齿槽漏数情况,可采用一定的传感器冗余算法诊断出发生故障(或正在过大接缝)的传感器,及时切换至另一路信号输出正常的传感器,并对错误的磁极相角信号进行修正,则能够有效地解决传感器过接缝问题。
4.1 传感器故障诊断
将跟踪微分器相应补偿算法后得到的相对位置传感器磁极相角信号预测值与当前时刻采样值比较,计算其残差,以此为依据对传感器进行故障诊断,即可以确定哪一路相对位置传感器发生故障。图10为将锯齿波信号融合为斜坡信号后,选取其中一路相角信号采用上述跟踪微分器进行滤波,并计算其残差后的滤波结果。
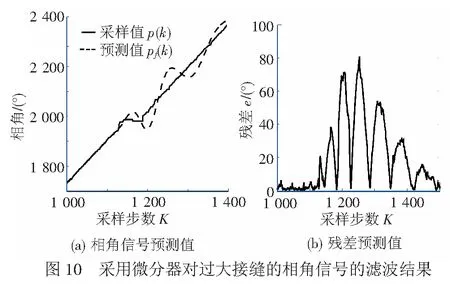
由图10可见,采用微分器及相应滤波算法对过大接缝的相角信号进行滤波,其预测值与实际相角值的残差在大接缝处最大,因此可以设置适当的阈值,当残差大于该阈值时,可认为该路信号正在经过大接缝,启动切换算法将相对位置信号自动切换到另外一路正常的信号即可。基于同样的原理也可诊断出传感器因其它原因导致的磁极相角信号计算故障。
4.2 切换算法
分别记p1(k)、p2(k)为两路磁极相角信号,pf1(k)、pf2(k)为采用微分器及补偿算法得到的两路磁极相角预测信号,N1、N2分别为两路信号的齿槽数,eT为残差阈值,则过大接缝的传感器切换算法流程见图11。

按照系统接口通信协议,定位测速系统需向牵引系统提供周期性的磁极相角信号,因此完成过大接缝的传感器切换后,仍需将连续的磁极相角信号还原为0~360°的锯齿形磁极相角信号。最终得到的切换后的磁极相角信号见图12。
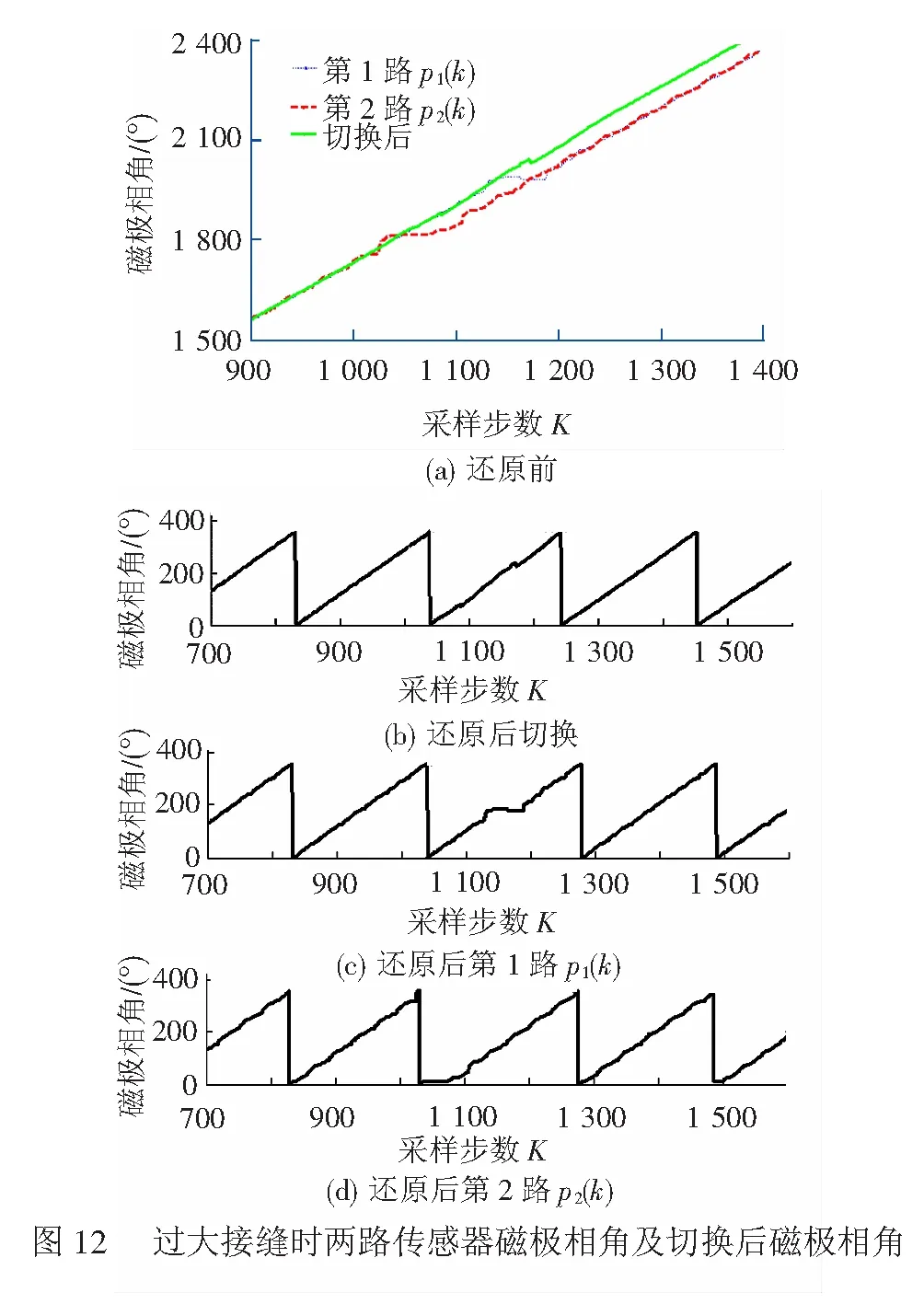
由图12可见,利用跟踪微分器对相对位置信号进行预测,在过大接缝时能够有效的实现相对位置传感器的切换,并修正故障传感器的相角信号。另外,由于跟踪微分器具有较强的滤波能力,经过处理的磁极相角信号也更为平滑。
5 结束语
本文对高速磁浮列车过轨道接缝时相对位置传感器位置、相角信号的畸变问题进行研究。根据当前一些跟踪微分器的特点,采用一种新型全程快速跟踪微分器,该跟踪微分器具有结构简单、精度高的特点。利用该微分器对相角信号进行滤波,能够有效的解决传感器过小接缝的信号畸变问题;同时对相角信号进行预测,能够准确的判断出过大接缝时传感器的故障,实现双传感器的切换,最终解决过大接缝的信号畸变问题。
参考文献:
[1] 刘进,吴汶麟.轨道交通列车定位技术[J].城市轨道交通研究,2001(1):30-34.
LIU Jin, WU Wenqi. Train Positioning Technology of Railway and Mass Transit[J].Urban Mass Transit,2001(1):30-34.
[2] 吴君尚,张辉.上海磁浮示范运营线的列车定位系统[J].城市轨道交通研究,2005(8):87-89.
WU Jun-shang, ZHANG Hui. Train Locating System of Shanghai Maglev Demonstration Line[J].Urban Mass Transit,2005(8):87-89.
[3] 李璐,吴峻,罗宏浩. 高速磁浮列车测速定位系统过接缝问题研究[J]. 铁道学报,2009,31(2):69-72.
LI Lu, WU Jun, LUO Honghao. Research of Joint-passing of Speed and Position Detection System of Maglev Train[J]. Journal of the China Railway Society, 2009, 31(2):69-72.
[4] 戴春辉,薛松,龙志强. 基于长定子齿槽的磁浮列车定位测速传感器信号处理[J]. 传感器技术学报,2009,22(6):822-826.
DAI Chunhui, XUE Song , LONG Zhiqiang . The Signal Disposal of Position and Speed Detection Sensors Based upon Long Stators for Maglev Train[J].Chinese Journal of Sensors and Actuators, 2009,22(6):822-826.
[5] 唐立. 高速磁悬浮列车相对位置传感器的研究与实现[D]. 成都:西南交通大学,2006.
[6] 孙玉绘,李璐,吴峻. 高速磁浮列车相对位置传感器的设计[J]. 自动化仪表,2008,29(7):63-65.
SUN Yuhui, LI Lu, WU Jun. Design of Relative Position Detection Sensor for High Speed Maglev Train[J]. Process Automation Instrumentation, 2008,29(7):63-65.
[7] 李璐,吴峻. 高速磁悬浮列车定位传感器的研究设计[J]. 传感技术学报,2007,20(7):1510-1513.
LI Lu, WU Jun. Research and Design of a Position Detection Sensor for High Speed Maglev Train[J]. Chinese Journal of Sensors and Actuators, 2007,20(7):1510-1513.
[8] SONG Xue, LONG Zhiqiang, HE Ning, et al. A High Precision Position Sensor Design and Its Signal Processing Algorithm for a Maglev Train[J]. Sensors, 2012,12(5):5 225-5 245.
[9] WANG Xinhua, CHEN Zengqiang, YUAN Zhuzhi. Design and Analysis for New Discrete Tracking-Differentiators[J].Applied Mathmatics-A Journal of Chinese Univesities,2003,18(2):214-222.
[10] DAI Chunhui, LONG Zhiqiang, XIE Yunde,et al. Research on the Filtering Algorithm in Speed and Position Detection of Maglev Train[J]. Sensors, 2011,11(7):7 204-7 218.
[11] 戴春辉. 高速磁浮列车高精度定位系统的研究[D]. 长沙:国防科技大学,2009.
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
物理之友(2020年12期)2020-07-16
组合机床与自动化加工技术(2019年10期)2019-10-31
新高考·高一数学(2019年4期)2019-09-07
电子制作(2018年1期)2018-04-04
幼儿教育·父母孩子版(2017年9期)2017-11-15
江苏农业科学(2016年5期)2016-07-23