
智能机器人在变电站三维实景巡检系统中的应用
2016-05-14 11:38邱曼曼石玮佳王娣
中国科技纵横 2016年7期
关键词:变电站
邱曼曼 石玮佳 王娣


【摘 要】提出了一种基于智能机器人的变电站三维实景巡检系统,将虚拟现实技术(VR)和变电站智能机器人巡检系统高度融合在一起,利用变电站现有的辅助监控系统、SCADA系统,构建了交互性好、沉浸式、多视野的变电站三维实景智能机器人平台。该系统的应用,可以提高变电站监控效率、减轻运维人员负担,克服各系统数据条块分割、人工关联的弊端,符合国家电网公司“三集五大”体系建设的要求。
【关键词】智能巡检机器人 三维实景 变电站
【Abateact】The application of intelligent robot on real three-dimensional platform for substation was proposed in this paper,the technology of virtual reality (VR) and intelligent substation inspection robot system was highly integrated,which wassupplemented by integration of existing auxiliary monitoring system and SCADA system.A well interactive, immersive, multi perspective substation real three-dimensional intelligent robot platform was built.The efficiency of substation monitoring can be reduced and personnel burden based on application of the system,also overcoming the various systems of data fragmentation and the drawbacks associated with artificial load,which meet the requirements of the State Grid Corporation.
【Key words】Intelligent robot,real three-dimensional,substation
1 引言
变电站智能机器人巡检系统是为适应智能化变电站以及无人值守变电站发展需求,全面提高变电站智能化水平发展而来。它以智能巡检机器人为核心,整合机器人技术、电力设备非接触检测技术、导航定位技术以及物联网技术等,能够实现变电站全天候、全方位、全自主智能巡检和监控[1]。
在变电站运行中,单一智能机器人巡检系统的应用确实给变电站巡检工作带来了一些实际便利,同时也存在一些缺陷和不足, 主要表现在:系统相对孤立、难以实现全覆盖、极端环境适应能力不强、难以开展较复杂工作[2]。
本文提出了一种基于智能机器人的变电站三维实景巡检系统,通过3D实景监控平台融合智能机器人巡检系统,消除机器人巡检系统孤立运行的历史,可实现与安防视频、火灾报警、PMIS系统等实现数据关联和共享,实现多系统的异常联动的功能[3],如图1。
2 技术方案
2.1硬件构成
基于机器人的变电站三维实景巡检系统为网络分布式架构,整体分为三层,分别为集控层、基站层和终端层。集控层可以对多个变电站的三维实景机器人巡检系统实现远程监控,包括三维实景监控平台;基站层由机器人后台、智能管理机、控制和分析软件系统组成;终端层包括智能巡检机器人、固定点热红外摄像机、固定点可见光摄像机、在线监测设备、红外传感器等。
2.2 系统策略
通过3D平台还原变电站现场的真实场景,将机器人巡检的路径在三维平台系统中真实展示并进行标注;在3D场景中实时展示机器人巡检位置移动,实现对机器人现场巡检情况的直观真实反映。
智能机器人结合3D实景平台针对重点巡检点设定巡检预置位,确定巡检预置位与3D实景电气设备对应关系。
针对机器人无法巡检到的区域,借助于3D平台融合的其他系统如SCADA系统、辅助监控系统等进行填补。
设定所需巡检的设备点以及关注的数据量、视频图像外观、热红外成像等必要的巡检信息,系统自动生成巡检路径,巡视人员通过平台随机或定时进行远程巡检,当进入已设定的巡检设备点时,系统将相关的设备相关在线监测数据,进行集中展示,并对实时巡检的结果、过去时间短的变化趋势等进行正常与否进行巡视、判定,形成远程综合分析巡检结果记录,如图2。
3 应用范围
针对500kV变电站,越来越多的综合监控、监测系统带来地运行新课题,提出的了基于VR(虚拟现实)技术,构建交互性好、沉浸式、多视野的统一监控平台,可以无缝融合智能机器人巡检系统、SCADA、视频图像监控系统、各种在线监测系统等等,从变电站实际指挥、运行诊断、检修操作等实际使用的角度出发,实现变电运行设备数据准确及时的采集,电气设备、各种监控装置等真实位置场景及实时状态以及历史运行记录、历史变化趋势等进行直观、立体、逼真的集中再现,形成真正的良好交互性的沉浸式统一智能监控平台,提高监控效率,减轻监控人员的监控负担,克服过去各系统数据条块分割、人工关联的弊端,完全契合国网公司“大运行、大检修”的体系建设理念。
该平台提出了全新的巡视方法,优化了电力现有巡检方法,通过优化目前传统的现场巡检模式,通过在该平台上设定巡检路线、巡检设备、巡检数据量、设备外观等不同巡检内容,巡视人员在定时或随机通过该平台上进行远程巡检,当进入巡检设备点时,系统将相关的设备相关在线监测数据,进行集中展示,并对实时巡检的结果、过去时间短的变化趋势等进行正常与否进行巡视、判定,形成综合分析结果记录,能远程、高效进行电气设备多系统、跨平台巡测,减少现场巡检频次,形成和现场巡检的高度互补、统一。
3.1 远程巡检
设定所需巡检的设备点以及关注的数据量、视频图像外观、热红外成像等必要的巡检信息,系统自动生成巡检路径,巡视人员通过平台随机或定时进行远程巡检,当进入已设定的巡检设备点时,系统将相关的设备相关在线监测数据,进行集中展示,并对实时巡检的结果、过去时间短的变化趋势等进行正常与否进行巡视、判定,形成远程综合分析巡检结果记录。
(1)按照规划路线,设定巡视的兴趣点设备、兴趣点内容,进行远程自动巡视。
(2)采集在线巡检系统中的每次巡检数据,然后将数据和设备模型绑定,方便检索和规范巡检作业记录,并且可以将自己关注的设备信息设置成常用巡检点进行自动巡检。
(3)自动巡检,规划路线,选择要巡检的设备,如主变、PT、开关,设置设备停留时间。
(4)场景内手动平视巡检。
(5)通过场景中的设备,直观检索在线巡检系统中的历次巡检数据。
3.2 智能机器人室外巡检
智能巡检机器人主要应用于室外设备巡检,巡检内容包括主变、开关、刀闸、母线、PT、CT、避雷器、电抗器、电容器、站用变等一次设备及其附件的外观检测;仪表数据读取;主变、高抗等设备声音采集;所有电压及电流致热型设备的红外精确测温等。
在变电站运行中,智能机器人的应用确实给变电站巡检工作带来了一些实际便利,同时也存在一些缺陷和不足, 主要表现在:系统相对孤立、难以实现全覆盖、极端环境适应能力不强、难以开展较复杂工作。
本次项目通过3D实景监控平台融合智能机器人巡检系统,消除机器人巡检系统孤立运行的历史,可实现与安防视频、火灾报警、PMIS系统等实现数据关联和共享,实现多系统的异常联动的功能。
具体功能实现如下:
(1)通过3D平台还原变电站现场的真实场景,将机器人巡检的路径在三维平台系统中真实展示并进行标注;
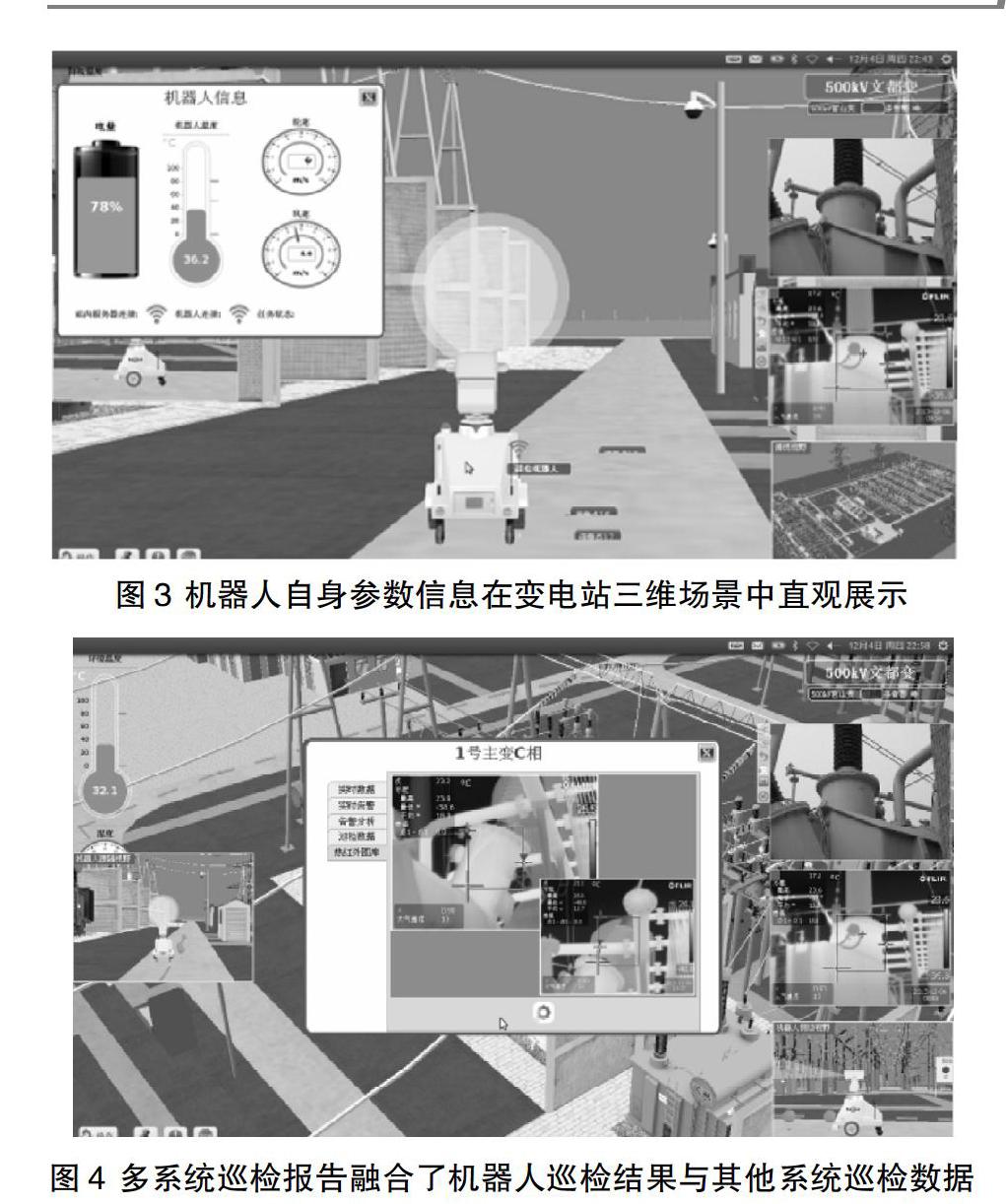
(2)在3D场景中实时展示机器人巡检位置移动,实现对机器人现场巡检情况的直观真实反映,如图3;
(3)在3D实景平台中反应机器人的自主巡检工作计划,实时反馈报警信息,并将巡检的结果进行分类保存,方便后续查询,如图4;
(4)在3D实景平台中嵌入机器人行走系统和检测系统等的控制权,通过3D实景平台上的操作来远程遥控机器人对特定设备进行特检;
(5)针对机器人无法巡检到的区域,借助于3D平台融合的其他系统如SCADA系统、辅助监控系统等进行填补。
3.3开关柜内等隐蔽区域巡检
针对日常巡检工作,可能无法掌握开关柜、环网柜内、电缆沟内等隐蔽区域的具体情况,通过在变电站内各个重要柜体内、电缆沟内部署集成红外传感器、LED灯的智能小巧网络摄像机,传感器来弥补这方面的不足。
作为工作人员现场巡检、机器人现场巡检无法巡检到的隐蔽区域,我们通过在3D实景平台巡检功能设置将这些日常很难巡检到的兴趣点加入到巡检计划当中,最终达到对变电站进行全方位的巡检的目的。
3.4智能告警
在整个三维场景中,每个设备模型会随着实时采集来的数据,智能判断设备工作状态是否正常。对于出现异常的,三维场景会自动将设备渲染成红色告警模式并定位,不断提示操作人员及时排除故障;
整个三维场景中,每个设备模型会随着实时采集来的数据,智能判断设备工作状态是否正常。对于出现异常的,三维场景会自动将设备渲染成告警模式并定位,不断提示操作人员及4 结语
本平台提出了全新的运行、监控方法和思路,提高了运行人员的业务水平和运检效率,促进了安全生产运行管理工作,保障设备健康运行,提高供电可靠性,为智能电力的电力智能物联网奠定坚实的平台基础。
参考文献:
[1]孙国凯,韩刚.《变电站巡检方式对比及其智能巡检机器人的研究与设计》.《电气时代》,2008年07期.
[2]谢伟杰.《智能巡检系统在变电站中的应用》.《黑龙江科技信息》,2014年25期.
[3]张垚.《500kV变电站实行无人值守运行管理模式》.《通讯世界》,2014年17期.
作者简介:
邱曼曼(1987—),女,安徽太和人,学士学位,助理工程师,主要研究电力系统变电运维;石玮佳(1992—),女,安徽滁州人,学士学位,助理工程师,主要研究电力系统变电运维;王娣(1985—),女,安徽淮北人,学士学位,工程师,主要研究电力系统变电运维。
猜你喜欢
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
电子制作(2017年24期)2017-02-02
电子制作(2016年19期)2016-08-24
现代工业经济和信息化(2016年5期)2016-05-17
东北电力技术(2016年2期)2016-05-17
河南电力(2015年5期)2015-06-08
中国工程咨询(2015年10期)2015-02-14
水电站机电技术(2014年1期)2014-09-26
