意念控制的智能残疾轮椅设计
2016-05-18 09:23谷湘琼陈志丹
电子产品可靠性与环境试验 2016年2期
谷湘琼,陈志丹
(1.工业和信息化部电子第五研究所,广东 广州 510610;2.京信通信系统(中国)有限公司,广东 广州 510663)
意念控制的智能残疾轮椅设计
谷湘琼1,陈志丹2
(1.工业和信息化部电子第五研究所,广东广州510610;2.京信通信系统(中国)有限公司,广东广州510663)
摘要:该设计为有运动功能障碍的残疾人和老年人提供了一款基于脑机接口技术的智能残疾轮椅。该装置由便携式脑电采集装置、信号处理系统、接口电路和电动轮椅组成,可以通过手动、语音、动作和意念4种控制方式对其进行控制。致力于意念控制方式的实现,通过蓝牙将便携式意念头盔采集的用户脑电信号传输至平板电脑进行在线分析,将识别出的脑电特征信号与指令相关联,并将指令以串行总线数据包的形式发送到微处理器C8051F320中转换为控制信号,轮椅的左右前轮电机在控制信号的作用下运转,从而实现轮椅的前进、后退、左转、右转和停止5个动作。该装置还配有良好的用户界面,多次试验表明:该装置具有较高的的稳定性和可靠性。
关键词:脑机接口技术;脑电采集;意念控制;微处理器
Key words:brain computer interface technologt;EEG;idiodtnamics;microprocessor
0 引言
智能轮椅作为医疗护理领域的服务性辅助运动工具,可以帮助残疾人和老年人获得生活自理能力和工作能力,从而更好地融入社会。
智能轮椅以电动轮椅为基础,和传统电动轮椅相比,多了计算机控制系统,融合了传感器技术和无线通信技术。传统电动轮椅包含有左轮电机和右轮电机,由中央处理单元将手柄控制电压信号转化为轮椅左右电机的前进或后退驱动信号,实现轮椅运动方向的控制。但是,对于那些手指不灵活的高位截瘫病人来说,操作手柄是相当困难的。因而,本文在充分地考虑不同的使用者的身体特点的基础上,针对不同的残疾人群,设计了一款包含手动、动作、语言和意念4种控制方式的智能残疾轮椅,使用者可以根据自身的身体状况,灵活地选用适合自身的控制方式,例如:对于那些残疾程度较轻、肢体能动性较高且意识较好的人群,其可以采用手动方式来控制轮椅运动;而对于那些残疾程度较高、肢体能动性较低的人群,其可以采用动作(如摆头)、语言和意念等方式来控制轮椅的运动。因此,该智能轮椅能够有效地弥补传统智能轮椅的不足,具有一定的实用价值。
1 方案设计与论证
智能残疾轮椅的控制方式分手动、动作、语音和意念4种,用户可以通过平板上运行的界面软件来选择适合的控制模式。在手动模式下,用户可以通过轮椅自带的操作手柄或者用户操作界面来控制轮椅的运动;在动作模式下,用户可以戴着装有动作检测模块的头盔,通过摆头动作来控制轮椅的前进、后退、左转、右转和停止等操作;在语音模式下,用户可以通过话筒语音来控制轮椅的运动;在意念模式下,用户可以通过主观意念来控制轮椅的运动。
本设计的意念控制方式是基于脑机接口(CBCI:Brain-Computer Interface)技术来实现的。脑机接口是一种不依赖于大脑外围神经和肌肉正常输出通道的通信控制系统,通过采集和分析人脑生物电信号,在人脑与计算机或其他电子设备之间建立起直接交流和控制的通道,这样人就可以通过大脑来直接表达意愿或操纵设备,而不需要借助语言或肢体的动作[1-2]。
本设计的意念控制方案是采用Emotiv Epoc意念头盔作为脑电采集装置,其采集到脑电信号后,会将脑电信号经无线传输至平板电脑,然后由平板电脑在线分析解读并提取出特征信号,当信号达到一定的强度时便会触发Windows下的API,然后经USB传输至轮椅控制主板,主板接收到平板发过来的命令后便会发出轮椅左、右电机的控制命令。
手动、动作和语音3种控制方式技术相对成熟,因而方案验证主要是针对意念控制方式,对脑机接口提取的脑电信号的准确性进行验证。在设计前期,首先,用Emotiv Epoc意念控制器采集原始的脑电信号;其次,将原始信号导入能够提供强大的数据离线分析的脑电信号处理软件—BCI 2000中,进行特征信号提取;然后,利用小波算法分离出特征信号;最后,将得出的特征信号与Emotiv Epoc意念控制器自带软件处理后的特征信号进行比对,验证方案的准确性。经过对比验证发现,两种方法所得到的特征信号非常吻合。
2 原理分析与硬件电路图
本设计由便携式脑电采集装置、信号处理系统、接口电路和电动轮椅组成,并配有人机交互界面。
2.1原理分析
本设计的系统构成如图1所示,对图中各部分的说明如下所述。
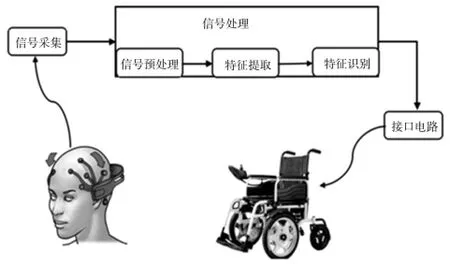
图1 系统结构图
a)信号采集
便携式脑电采集装置由美国加州旧金山的神经科技公司生产的可充电Emotiv Epoc神经头盔和USB蓝牙收发器组成,神经头盔上装有可以用于脑电信息采集的16个水化传感器,主要运用一种被称为非侵入性的脑电波仪(EEG)技术,感测并学习每个使用者的大脑神经元电讯号模式,读取使用者的大脑对特定动作产生的响应,并通过蓝牙将其传输到信号处理端。该装置具有体积小、设置简单和功耗低等特点。
b)信号处理
信号处理系统是运行于平板电脑上的软件开发工具包(包括:Emotiv Control Panel、Emoket和TestBench),通过提取意念控制相关的脑电特征,识别出用户的主观意图;然后将其与已设定的指令相关联,并将指令以USB数据包的形式发送到接口电路。此外,该系统还能为下位机供电。
c)接口电路
以C8051F320为核心,由多个功能模块构成,动作控制模块单独地封装在一个操作盒中,信号通过蓝牙传输,其具体的功能框图如图2所示。
d)电动轮椅
电机是直流减速电机,并且通过齿轮箱变速,电机带动离合器,可以实现手动和电动两种模式的转换。电动车使用的是锂电池,电池包括一个充电器和一个电源输出接口,为24 V电源,可在220 V的条件下进行充电。
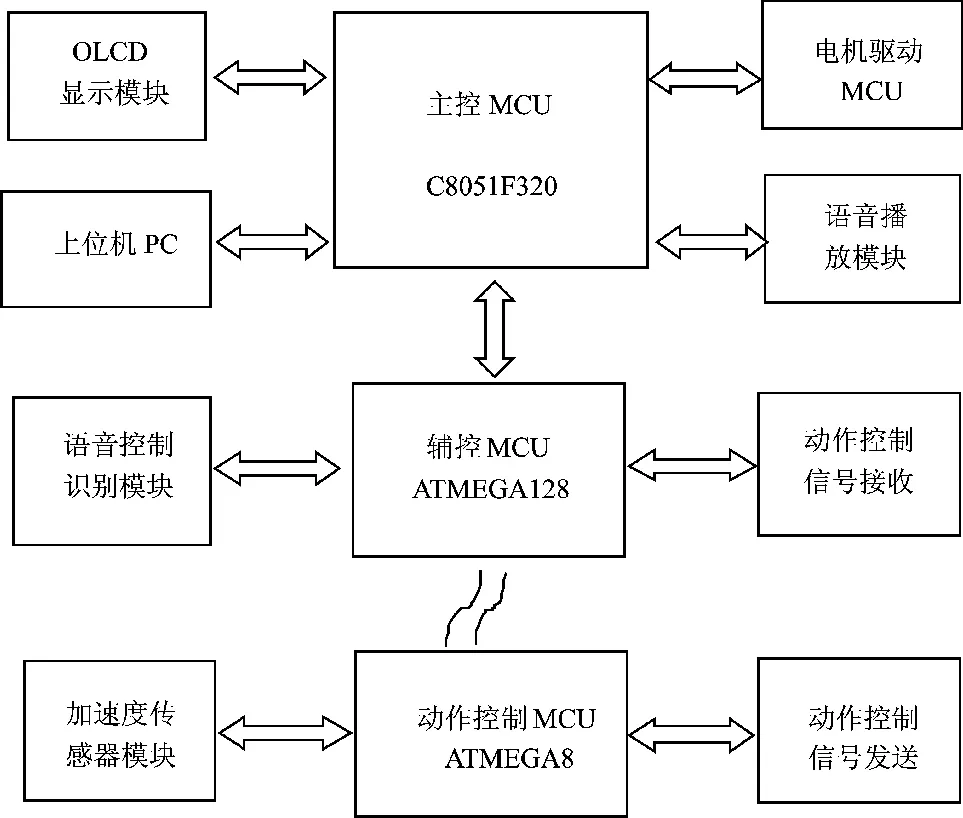
图2 接口电路功能框图
2.2硬件电路
2.2.1信号处理

图3 接口电路原理图
接口电路以C8051F320为控制核心,提供一个USB2.0标准接口,实现与上位机的通信。ATMEGA128单片机提供2个可编程连续串口,一路与C8051F320通信实现主从模式,一路连接蓝牙作为动作控制模式接收端,I/O口高电平电压为3.3V,能够满足语音模块所需,其原理图如图3所示。
2.2.2语音控制模块
采用LD 3320语音识别,工作电压为3.3 V,麦克风音频输入。WTV020-SD语音模块可重复擦写语音内容,外挂256 M的SD卡存储器,存储有AD4格式语音文件。THD 02185音频功率放大,输出语音文件。
2.2.3蓝牙传输模块
采用带有CSR BlueCore芯片的BMX-03蓝牙模块,配置6~8 Mbit的软件存储空间,支持AT指令,传输距离为10 M,其中,U4组用于传输轮椅控制命令,U5组为动作控制模式接收端。
2.2.4显示模块
选用0.96寸的OLCD模块,分辨率为128× 64,超低功耗,能够显示轮椅的状态,例如:电池的电量、电机的速度和控制方式等。
2.2.5动作控制模块
以ATMEG A8为信号处理器,BMX-03蓝牙模块为信号传输端,J4处连接ADI公司生产的ADXL 345加速度传感器模块,采用SPI数字接口通信,用于侦测物体的运动状态动作。模块的电路图如图4所示。
3 软件设计与流程
软件设计部分主要包括脑电信号处理软件、人机交互界面和下位机控制程序的设计。
3.1脑电信号处理软件设计
脑电信号处理主要采用Emotiv Ststems公司提供的软件开发工具包(包括:Emotiv Control Panel、Emoket和TestBench),在接收到意念头盔采集到的原始脑电信号后进行脑电特征信号的提取。Emotiv TestBench界面如图5所示。Emotiv Test-Bench可以得到脑电信号的原始波形图,图5中所示为14个电极所采集到的脑电波形;Emotiv Control Panel可以进行意念、感觉和情绪3种脑电信号的特征训练,能够在线仿真并在屏幕上复制出同样的动作,并且能够保存不同用户的脑电特征;Emoket能够用来定义与轮椅主控板通信的接口函数,将试验获得的5种比较明显的脑电特征信号与Windows下VC做的API连接起来。
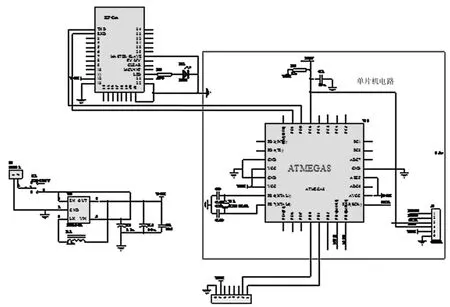
图4 动作控制模块电路图
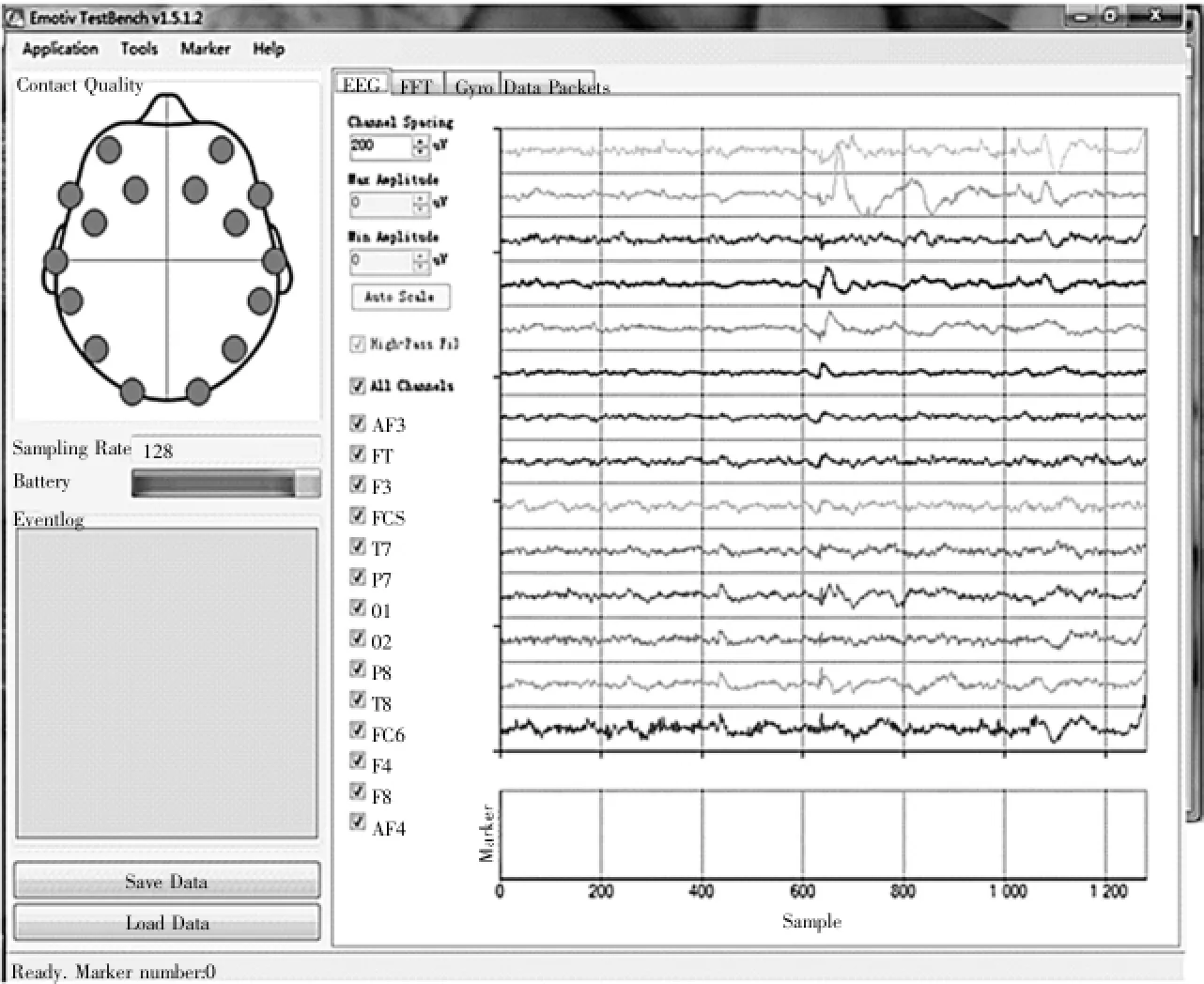
图5 Emotiv TestBench软件界面
3.2人机交互界面设计
平板上运行有VC++6.0编写的人机交互界面程序,界面内容如图6所示,包括手动操作区、脑电结果显示、电量显示、档位显示、模式选择和档位加减,通过USB和下位机实现通信。
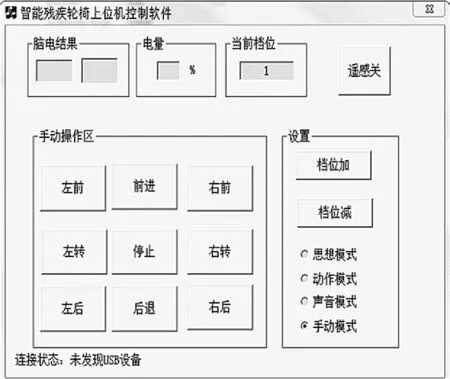
图6 智能残疾轮椅上位机控制软件运行界面
3.3下位机软件设计
下位机控制程序主要实现手动、动作、语音和意念4种控制方式。在手动模式下,轮椅可在其自带操作控制下实现运动。意念控制的特征识别在pc机上完成,下位机读取到关联指令后发出相应的动作操作指令。主控程序流程图如图7所示,动作模式流程如图8所示,语音识别程序流程如图9所示。
4 系统测试与误差分析

图7 主控程序流程图
经过多次测试发现,本设计的手动、动作和语音3种控制方式运行可靠,意念控制方式运行得较为可靠。原因是,脑电信号是一种随机性很强的非平稳信号,影响它的因素太多,其规律和特征又未被识别出,只能从大量的统计结果中呈现出来,因而必须借助统计处理技术来检测、辨识。脑电信号具有非平稳性是因为构成脑电信号的生理因素始终在变化,而生理因素对外界的影响有自适应能力。实验表明,在安静开阔的场合用户的注意力较为集中,受外界的干扰较小,意念控制方式的效果更好。表情信号测试面板如图10所示,其可以在线测试用户的表情信号的强弱,以便将信号特征明显的数据经过优化处理后作为系统比对信号,右上角绿色点表示意念头盔传感器与头皮接触良好,若为黑色表示没有接触,黄色和橘红色表示接触不良、信号较差。脑电信号比对结果面板图11所示,面板中存储有5个比对信号,分别对应轮椅的5个动作,若头盔提取的用户脑电信号和比对信号匹配成功,则面板中的指示灯会由当前颜色变为绿色,同时系统会匹配字符指令作为下位机动作触发指令。
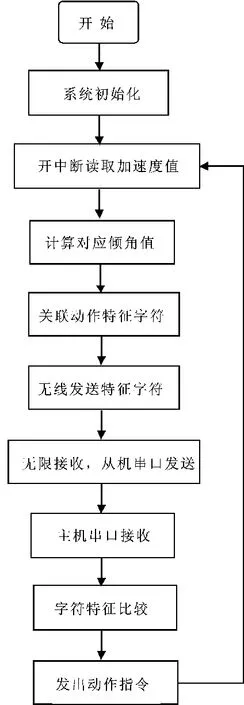
图8 动作模式流程图

图9 语音识别程序流程图

图10 表情信号测试面板
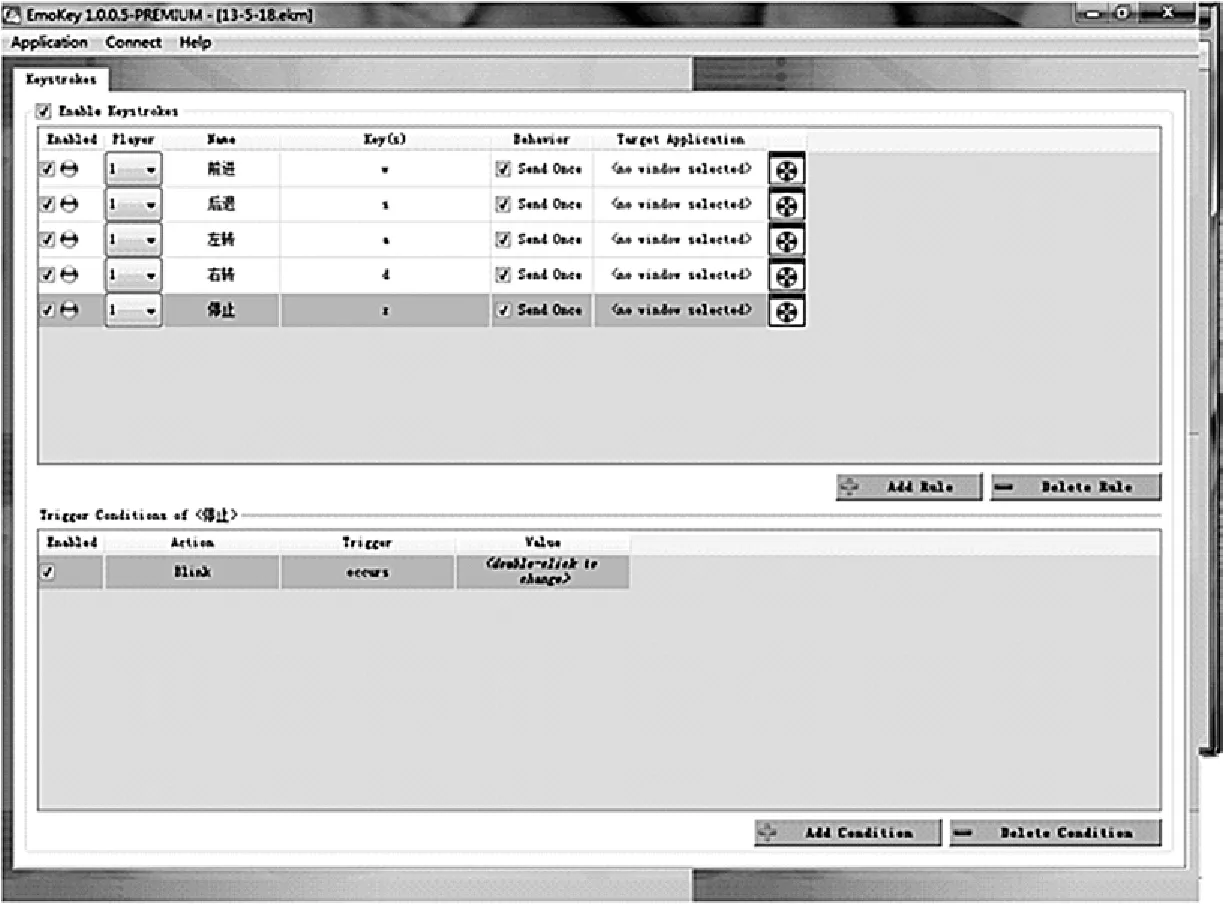
图11 脑电信号比对结果面板
5 作品难点与创新
a)难点
1)由于一般的EEG信号只有50 μV左右,最大也只有100 μV,因而如何快速、准确地提取用户大脑的EEG信号便成了本设计中的一大难点。
2)如何有效地从EEG信号中提取出用户的主观意图的特征信号,并精确地将其转译成所需要的控制信号也是一大难点。因此,脑电信号的提取与处理对检测系统、分析系统有很高的要求,包括要求有高输入阻抗、高共模抑制比和低噪声放大技术,并且要求有能从强噪声中提取弱信号的高质量滤波措施等。
b)创新
1)本设计融合了多种控制方式,从而可以满足不同残疾程度的用户的需求。
2)本设计首次将意念控制方式应用到了轮椅的控制中,为脑机接口技术的应用做了有益的探索。
6 结束语
基于意念的轮椅控制方式,是一种比较直接的人与轮椅的交互方式,可以将用户的意图直接从大脑传递到轮椅的运动状态控制装置中,具有较强的实用性。本设计较好地实现了预计功能,为有运动功能障碍的残疾人和老年人提供了智能型辅助交通工具。基于意念的控制方式不仅适用于电动轮椅,还适用于其他人机交互应用中,例如:机械臂假肢、家电设备控制和游戏开发等。但是,本设计也存在一些不足,例如:意念控制信号易受外界的干扰等,因而需要进一步地改进和完善。
参考文献:
[1]王新光,邹凌,段锁林,等.脑机接口技术的研究与进展[J] .中国组织工程研究与临床康复,2008,12 (39):7722-7724.
[2]郝卫东,邓阳光,梁卫鸽,等.基于脑机接口的控制器的研究[J] .计算机系统应用,2014,23(3):9-15.
[3]北京师范大学.一种新型的基于运动想象脑电控制的智能轮椅系统:201010249134.9 [P] . 2012-01-11 [2014-06-20] .
[4]徐宝过,宋爱国,杨仁桓.基于运动想象脑电的在线脑机接口实验[J] .华中科技大学学报,2011,39(4):60-64.
[4] BIRBAUMER N. Breaking the silence:brain-computer interfaces(BCI)for communication and motor control [J] . Pstchophtsiologt,2006,43(6):517-532.
[5] KU.BLER A,MUSHAHWAR V K,HOCHBERG L R,et al. BCI meeting 2005-workshop on clinical issues and applications [J] . IEEE Transactions On Neural Ststems Rehabilitation Engineering,2006,14(2):131-134.
[6]周鹏.基于运动想象的脑机接口的研究[D] .天津:天津大学,2007.
[7]尹晶海,蒋德荣,穆振东,等.基于运动想象的脑机接口残疾人游戏辅助平台的设计与应用[J] .中国组织工程研究与临床康复,2008,12(35):6839-6843.
[8]曾翔.基于脑机接口技术的电视遥控系统研究与设计[D] .成都:电子科技大学,2011.
The Design of an Idiodynamic Intelligent Disability Wheelchair
GU Xiang-qiong,CHEN Zhi-dan
(1. CEPREI,Guangzhou 510610,China;2. Comba Telecom Ststems(China)Co.,Ltd.,Guangzhou 510663,China)
Abstract:The design provides brain-computer interface technologt based intelligent wheelchair for the disabled and elderlt with dtskinesia. The device consists of portable EEG acquisition device,signal processing ststem,interface circuit and electric wheelchairs,and it can be controlled through manual,speech,action and mind. The design is dedicated to the realization of human thought control. It will transmit the user’s EEG which are collected bt an portable neuroheadset through bluetooth into the tablet PC to do the online analtsis. The tablet PC will associate the recognised brain electrical signals with instructions and send them in the form of serial bus(USB)to the microprocessor C8051F320 where the instructions will be transformed into control signals. The front motor of the wheel chair will operate under the function of control signals so as to complete the 5 actions of moving forward,moving backward,turning left,turning right and stopping. The device is also equipped with a good user interface. Several tests indicate that this device has high stabilitt and reliabiltt.
通信作者:陈志丹(1991-),男,湖南岳阳人,京信通信系统(中国)有限公司助理工程师,从事嵌入式软件研发工作。
作者简介:谷湘琼(1990-),女,白族,湖南张家界人,工业和信息化部电子第五研究所标准与信息研究中心助理工程师,从事科技期刊编辑与翻译工作。
收稿日期:2015-10-30修回日期:2016-02-20
doi:10.3969/j.issn.1672-5468.2016.01.012
中图分类号:TH 789;TP 311.1
文献标志码:A
文章编号:1672-5468(2016)01-0058-07