基于无差拍控制的交流电机端口特性模拟
2016-05-22 02:33宋鹏先张郁颀李耀华唐庆华
电工电能新技术 2016年6期
宋鹏先, 张郁颀, 李耀华, 唐庆华
(1. 国网天津市电力公司电力科学研究院, 天津 300384; 2. 国家电网公司客户服务中心, 天津 300309; 3. 中国科学院电工研究所, 北京 100190)
基于无差拍控制的交流电机端口特性模拟
宋鹏先1, 张郁颀2, 李耀华3, 唐庆华1
(1. 国网天津市电力公司电力科学研究院, 天津 300384; 2. 国家电网公司客户服务中心, 天津 300309; 3. 中国科学院电工研究所, 北京 100190)
针对电力电子负载变流器采用PI控制器无法实时跟踪电机端口特性电流的问题,提出一种基于无差拍控制的电流跟踪控制策略。本文首先分析了电力电子负载模拟交流电机端口特性的基本原理,采用Adams法求解电机数学模型,获得电机定子电流状态量作为负载变流器电流环的指令电流。考虑到电机工作状态发生变化时,端口电流会存在非重复的暂态过渡分量,而基于内膜原理的控制器无法实现对该电流的实时跟踪,所以提出采用无差拍控制器。鉴于实际数字控制系统中至少存在两拍延迟,又提出采用线性预测方法进行补偿。最后对异步电机的典型工况进行了模拟,仿真和实验验证了本文提出的电流环控制策略的有效性。
电力电子负载; 无差拍控制; 线性预测
1 引言
电机作为主要动力设备广泛应用于交通、国防及社会日常生活中,是用电量最多的一类电器。其中异步电机,特别是鼠笼型异步电机以其价格低廉、可靠性高成为应用最广泛的一类电机。随着高频PWM调制技术日趋成熟,交流电机进入了可调速领域[1-3]。整个电机调速系统一般包括电源、电机驱动器、电机及其机械负载。电机驱动器是调速控制系统中最关键的设备,直接影响到调速系统的性能。在其研制和考核过程中,通常需要和电机及其机械负载一起构成实验平台,然而电机或者机械负载可能不容易在实验室条件下获得,因而这种测试方案具有系统复杂、硬件成本高、操作不灵活、电能利用率低等缺点。对于电机驱动器而言,电机和机械负载可以看作一个整体,如果电力电子负载(Power Electronic Load, PEL)能够模拟该部分端口的电气特性,就可以作为电机驱动器的功率负载。我们将此种工况下电力电子负载称为电机模拟器[4-6]。
对电机模拟器的研究主要为电机状态量求解和电机端口电流的跟踪控制策略。文献[7,8]对比分析了几种常用数值计算方法的原理和特点,分别在不同步长下采用Ruler法和Adams法对异步电机状态方程进行求解,最终提出在步长100μs下采用二步Adams法可以准确求解电机模型,求解得到的电机定子电流作为电机模拟器电流环指令电流。
在电机工作状态发生变化时,譬如启动过程、突加负载、突减负载,其端口电流存在非重复的暂态过渡分量,对这种特性电流的跟踪,文献[7,9]提出采用PI控制器的电流跟踪策略,然而由于电流幅值和频率的非重复性,基于内模原理的PI控制器无法实时跟踪指令电流;文献[6]提出采用滞环控制方法,虽然这种方法电流响应速度快,较PI控制器电流跟踪效果好,但是其开关频率不固定,开关损耗较大。
基于以上研究,本文提出采用基于无差拍控制的电流跟踪控制策略,并通过仿真和实验验证该控制策略的有效性。
2 三相PEL模拟异步电机运行的控制策略
2.1 三相PEL模拟异步电机运行的基本原理
电机由三相交流电源直接供电时,异步电机处于开环运行状态。此工况下三相电力电子负载模拟电机开环运行的原理图如图1所示,主要包括电机仿真器和负载变流器控制系统两部分。

图1 三相PEL模拟电机开环运行的原理图Fig.1 Principle diagram of simulation of motor open-loop operation
其中电机仿真器的工作原理为:采样电源电压作为电机仿真器的输入,基于电机动态数学模型,采用Adams法求解电机的端口电流[7]作为负载变流器电流环的指令电流。如果负载变流器控制系统能够实现电机端口指令电流的无静差跟踪,那么对于该电机电源而言,电力电子负载与该异步电机等效。
2.2 负载变流器电流环跟踪控制策略
电机端口稳态电流在dq坐标系下和αβ坐标系下为直流量和单频的正弦交流量,所以分别采用基于内模原理的PI控制器和PR控制器能够实现电流的无静差跟踪;但当电流动态变化时,无论dq坐标系下还是αβ坐标系下都存在暂态过渡过程,PI控制器和PR控制器都无法实现电流动态过程的快速跟踪。由于dq坐标系下的模型严重依赖锁相系统,锁相获得的相位信息与真实值存在稍许误差,误差会导致dq模型不准确,最终影响负载变流器的控制。因此本文选择在αβ坐标系下进行控制系统设计。
2.2.1 负载变流器电流环无差拍控制方法
无差拍控制是一种全数字化控制策略,应用于很多数字系统,其主要特点是跟踪精度高、动态响应快,但其固有的计算延迟会影响电流快速跟踪性能,可以采用预测电流控制加以改善。在模拟电机电流动态变化的系统中,电流波形的变化非重复性,要满足较快的动态跟踪效果,无差拍控制相对于基于内模原理的控制器具有优势。
图2为基于αβ坐标系的负载变流器电流环在连续与离散时间域内的控制框图。由于α轴和β轴的控制框图相同,故本文将以α轴为例进行分析。图2中iαref和iβref、iLα和iLβ分别为αβ坐标系下的指令电流和实际电流,G(s)为被控对象。

图2 负载变流器电流环控制框图(连续时间域)Fig.2 Control block diagram of load converter current-loop (time domain)
数字控制中至少存在一个采样周期的延迟e-sT(T为采样时间),零阶保持器的传递函数为H(s)=1/s-e-sT/s。忽略电感内阻的影响,被控对象为1/(sL),采用零阶保持器近似法对G(s)连续时间域模型进行离散化处理,即
(1)
电流环离散时间域内的控制框图如图3所示。

图3 负载变流器电流环控制框图(离散时间域)Fig.3 Control block diagram of load converter current-loop (discrete domain)
无差拍控制使闭环传递函数为延迟环节z-1的整数倍,这样电流环就可以在有限拍跟踪上给定信号,系统闭环传递函数W(z)可以表示为:
(2)
实际的数字控制中,由于存在采样延迟一拍和控制延迟的情况,电流环最快至少滞后2个采样周期时间才能跟踪上给定电流,考虑2拍的延迟,即N=2,可得无差拍控制器D(z)的传递函数为:
(3)
在系统参数相对准确的系统中,采用无差拍控制能得到较好的控制效果。
2.2.2 基于线性预测的无差拍控制方法
由2.2.1节分析可知,该电流环的实际电流与指令电流的关系为:
iLα(k)=iαref(k-2)
(4)
即实际电流滞后给定电流两拍。为了实现电流环的无差跟踪,根据该系统的输入输出关系,可以预测未来两拍的参考电流作为当前的给定,即
(5)

(6)
此时电流环实现了无差跟踪。
常用的预测方法有平推预测、线性预测和重复预测等。其中平推预测是最简单的预测方法,其将当前拍的值作为预测值,然而这种预测方法的误差较大;重复预测是在线性预测的基础上叠加误差补偿,在负载突变时,线性预测起作用,而补偿值在一个周波之后起作用,实现方法较为复杂,常用于谐波电流的无差跟踪。本文采用的预测方法为线性预测,其基本原理如图4所示。

图4 线性预测原理示意图Fig.4 Schematic diagram of linear prediction
对于正弦波的采样,如果采样频率远大于基波周期,则可近似认为相邻点的斜率是相同的。图4中点A、点B和点C是相邻的采样点,可以认为这三个点在一条直线上,由几何关系可知:
(7)

(8)
那么可以通过式(8)获得指令电流未来两拍的预测,即
(9)
3 仿真验证
基于PSIM软件搭建三相电力电子负载仿真模型,如图5所示。其中负载变流器(Simulation Converter, SC)的滤波电感为Li,三相输入电流为iLa、iLb、iLc;并网变流器(Grid Connect Converter, GCC)的滤波电感为Ls,三相输出电流为isa、isb、isc。仿真主要参数如表1所示。

图5 三相电力电子负载仿真模型Fig.5 Simulation model of three-phase PEL

表1 仿真参数Tab.1 Simulation parameters
图6为αβ坐标系下电流环采用PR控制器的仿真波形,其中iLa、iLb和iLc为负载变流器的三相输入电流,iaref、ibref和icref为电机端口指令电流。由图6可知,对于动态变化的电流跟踪,PR控制器无法实现无差跟踪。图7为αβ坐标系下电流环采用基于线性预测的无差拍控制的仿真波形。

图6 采用PR控制器的仿真波形Fig.6 Simulation waveforms with PR controller
图8为模拟异步电机突加负载工况的仿真波形。负载变流器的电流环采用基于线性预测的无差拍控制,0.5s前是电机空载启动阶段,0.5s时突加负载,机械负载转矩由0增大为20N·m。
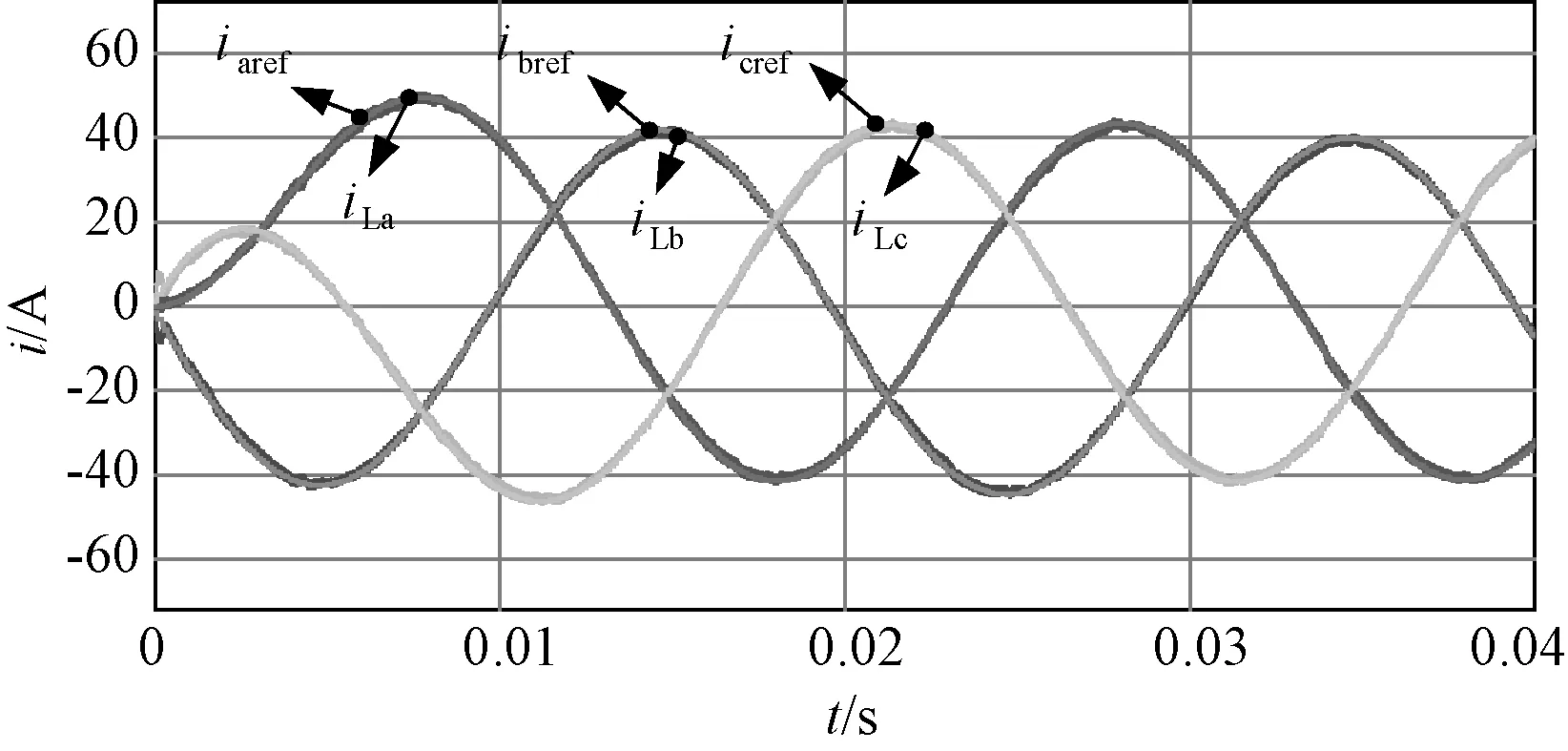
图7 基于线性预测的无差拍控制器的仿真波形Fig.7 Simulation waveforms with deadbeat controller based on linear prediction

图8 模拟突加负载工况的电流仿真波形Fig.8 Simulation waveforms of sudden load
由图8中结果可知,负载变流器的三相输入电流能够无差跟踪电机端口指令电流,说明采用本文提出的基于线性预测的无差拍控制方法能较好地实现电机动态电流跟踪。此方法与采用PR控制器电流环相比,模拟精度更高,控制效果更好,仿真结果与理论分析结果一致。
4 实验验证
在380V/33kV·A样机平台上,对本文提出的电流环控制策略进行实验验证,实验参数与仿真相同。
图9为αβ坐标系下采用PR控制器的实验波形,其中图9(a)为模拟异步电机空载运行时的负载变流器三相电流波形,图9(b)为电机启动过程中的A相局部电流放大波形。可见实际电流无法实时跟踪指令电流,表明PR控制器无法实现动态电流的无差跟踪。
图10为采用本文提出的基于线性预测无差拍控制的异步电机空载起动电流波形。可见实际电流能够较好地跟踪指令电流,表明本文提出的无差拍控制对于动态变化电流的跟踪效果要优于基于内模原理的PR控制器。图11为模拟异步电机突加负载工况的实验波形。可见突加负载后,电机端口电流存在一个动态变化过程,然而采用本文提出的无差拍控制策略能够保证对动态指令电流的无差跟踪。
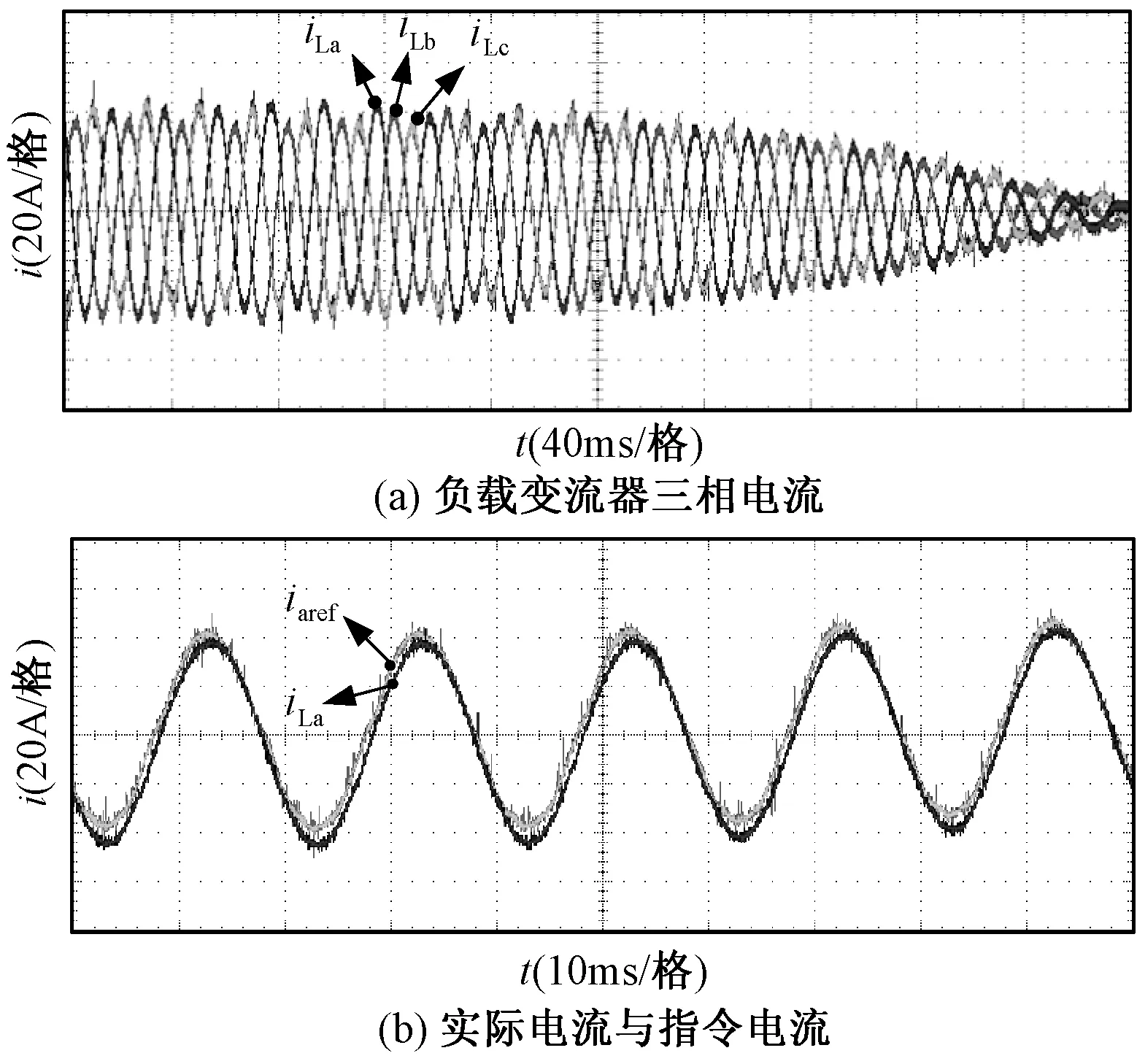
图9 PR控制的模拟异步电机空载起动电流波形Fig.9 No-load starting current simulation waveforms with PR control

图10 基于线性预测无差拍控制的模拟异步电机空载起动电流波形Fig.10 No-load starting current simulation waveforms with deadbeat controller

图11 基于线性预测无差拍控制的模拟异步电机突加负载时电流波形Fig.11 Simulation waveforms of sudden load with deadbeat controller
5 结论
针对三相电力电子负载模拟异步电机开环运行工况,本文分析了其基本原理,并针对负载变流器的电流环控制,提出了一种基于线性预测的无差拍电流控制策略。仿真和实验结果表明,相对于基于内模原理的PR控制器,本文提出的控制策略能够更好地实现电机端口动态电流的跟踪,提高了三相电力电子负载模拟异步电机开环运行特性的精度。
[1] 陈坚(Chen Jian). 交流电机数学模型及调速系统(Mathematical model of AC motor and speed control system)[M]. 北京: 国防工业出版社(Beijing: National Defence Industry Press), 1989.
[2] 毛承雄,王丹,陆继明,等(Mao Chengxiong, Wang Dan, Lu Jiming, et al.).原动机及其调速系统动态模拟(Dynamic simulation of prime mover and its governor)[J].继电器(Relay), 2004,32(19):34-38.
[3] 杨家强(Yang Jiaqiang). 基于PWM整流器和异步电机直接转矩控制的交流变频动态电力测功机的研究(Research on AC variable-frequency dynamic power dynamometer based on PWM rectifier and DTC of induction machine)[D]. 杭州: 浙江大学(Hangzhou: Zhejiang University), 2004.
[4] 黄清军,邹云屏,吴振兴,等(Huang Qingjun, Zou Yunping, Wu Zhenxing, et al.). 模拟直流电机的电力电子负载研究(Study on power electronics load in DC motor simulator)[J]. 电源学报(Journal of Power Supply),2011, (6):20-24.
[5] 陈志博(Chen Zhibo). 基于PWM换流器的异步电动机及其负载特性数字模拟(The simulation of asynchronous machine and the load characteristic based on PWM converter)[D]. 武汉:华中科技大学(Wuhan: Huazhong University of Science & Technolog), 2007.
[6] 姚剑锋(Yao Jianfeng).基于PWM技术的电动机模拟器(Motor simulator based on PWM)[D]. 天津: 天津大学(Tianjin: Tianjin Universiy), 2006.
[7] 黄清军(Huang Qingjun). 模拟电机特性的电力电子负载研究(Research on power electrical load of the motor simulator)[D]. 武汉:华中科技大学(Wuhan: Huazhong University of Science & Technolog),2012.
[8] 黄清军,孙牧村,邹旭东,等(Huang Qingjun, Sun Mucun, Zou Xudong, et al.). 模拟电机端口特性的电力电子负载系统设计(Design of power electronic load system simulating motor port characteristics) [J]. 电力系统自动化(Automation of Electric Power Systems), 2014, 38(3):71-77.
[9] 宋鹏先,李耀华,王平(Song Pengxian, Li Yaohua, Wang Ping).交流电机端口特性的数字化实现方法(The digital realization method of AC motor simulator)[J].电工技术学报(Transactions of China Electrotechnical Society), 2015, 30(14): 184-192.
Simulation of port characteristics of AC motor based on deadbeat control
SONG Peng-xian1, ZHANG Yu-qi2, LI Yao-hua3, TANG Qing-hua1
(1. State Grid Tianjin Electric Power Research Institute, Tianjin 300384, China; 2.State Grid Customer Service Center, Tianjin 300309, China; 3. Institute of Electrical Engineering, Chinese Academy of Sciences, Beijing 100190, China)
Because the power electronic load converter cannot track the characteristics of motor in real time using PI controller, a current tracking control strategy based on the deadbeat control is proposed. In this paper, the basic principle of AC motor characteristics simulation is analyzed. The Adams method is used to solve the motor mathematical model and the current state of the motor is used as the instruction current of the current-loop. Then, when the motor working condition changes, the port current will have non-repeated transient components. The controller based on the inner membrane theory is unable to realize the real-time tracking of the current, so it is proposed to adopt the deadbeat controller. In view of the fact that there are at least two beat delays in the actual digital control system, the linear prediction method is used to compensate for the delay. Finally, the simulation of the typical operating conditions of induction motor is carried out. The simulation and experiment verify the effectiveness of the proposed current loop control strategy.
power electronic load; deadbeat control; linear prediction
2015-12-04
宋鹏先 (1986-), 男, 辽宁籍, 工程师, 博士, 研究方向为大功率变流器、 柔性交流输电; 张郁颀 (1987-), 女, 天津籍, 工程师, 硕士, 研究方向为柔性直流输电。
TM46
A
1003-3076(2016)06-0024-05
猜你喜欢
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2019年10期)2019-06-17
网络安全和信息化(2017年6期)2017-11-23
网络安全和信息化(2016年7期)2016-11-26
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
航天器工程(2014年5期)2014-03-11