
可变径机构在新型“蛋形”管道探测机器人中的应用研究
2016-05-23 03:34朱治鹏吴其林邵宇吉张东升合肥工业大学机械与汽车工程学院230009
电子测试 2016年6期
朱治鹏,吴其林,邵宇吉,张东升(合肥工业大学机械与汽车工程学院,230009)
可变径机构在新型“蛋形”管道探测机器人中的应用研究
朱治鹏,吴其林,邵宇吉,张东升
(合肥工业大学机械与汽车工程学院,230009)
摘要:为了满足不同工业环境的管道探测需求,本文介绍的一种新型管道探测可变径结构是基于STC90C51单片机控制系统,融合胶囊“蛋形”结构设计元素,在胶囊“蛋形”椭圆轮内部中,通过主锥齿轮、侧锥齿轮与螺旋机构系统啮合传动,通过电动机控制,将螺旋杆的旋转运动状态转变为蛋形轮向两侧的直线运动,从而可以实现在管道内部探测的可变径功能,能够很好地满足当下探测工程的需求。
关键词:可变径;蛋形轮;机器人;管道;探测
合肥工业大学2014年国家级大学生创新训练计划项目资助,项目编号为201410359007
随着社会科技化的日益发展,渗透着科技元素的探测工程技术已经逐步在各个领域发挥着重要的作用。管道探测是探测工程里非常重要的探测领域,往往在管道内部,由于具有一定的危险性、不便性等问题,管内机器人可以代替人工在给谁排水、天然气等行业发挥着重要的作用,因为机器人的高效灵活能力能够满足很多领域管道探测的需求,在现代工业领域发挥着重要的作用。
在当下的可变径管道探测机器人结构设计中,由哈尔滨工业大学邓宗全、陈军、姜元生等人设计的六轮独立驱动管道机器人,采用弹簧封闭力设计,能够实现随管径变化而变径的功能,同时各个行走轮都单独有着驱动电机和传动机构。同时由韩国Choi H R等人设计的用于天然气管道检测机器人设计系统中,利用“弹簧+平行四边形机构”来实现多轮子贴壁的功能,动力装置则利用同步带来实现,不过利用这种弹簧力的作用时候,若管径变化较大,则弹簧产生的封闭力变化也较大,易失去作用特性,可靠性和稳定性将受到影响。由上海大学机电工程与自动化学院陆麟、章亚男等人设计的适应管径变化的管道机器人,采用三组行星轮系作为行走部件和径向尺寸调节机构,并沿着管道圆周均匀分布,利用“蜗杆—行星轮系”结构,使得机器人能够根据管径的大小自动调节径向尺寸,从而实现变径功能,符合一定的实际要求。可是这种结构采用三组太阳轮和行星轮设计,体积庞大,在管道的横截面积中占据这大量的面积,不便于携带且变径能够限制较大。
现在在工程领域主流的机器人探测系统主体都是由四轮式,搭载各种传感器和高清摄像头进行数据采集和图像视频收集,通过电机驱动四轮前进、后退或者转弯,这样的机器人虽然在一定的领域可以满足某种工业程度的需求,但是由于管道的特殊结构、机器人体积、便携性等问题的限制,往往在特定的环境下难以高效便利地完成任务。基于该原因,本文主要研究的是一种新型变径结构在“蛋形”轮子里面的应用原理与特性。
1 结构设计原理
由于在管道探测工程中常受到管道形状、管道半径、管内异物等多种因素的影响,为保证机器人能够更好地开展工作,我们在传统的管道探测机器人结构上融入了新型的“变径球滚”设计元素,一种新型的胶囊“蛋形”轮子结构,利用两个大的椭圆轮来代替传统的探测机器人的四轮式结构,在管道探测机器人中,搭载可变径结构,结合蛋形结构设计,通过慧鱼零件,将螺旋机构的螺旋运动转化为蛋形轮子的两侧扩展伸缩的直线运动,从而实现可变径的功能。
2 可变径结构设计
本结构初期采用慧鱼各零件搭建而成,通过慧鱼创意组合模型,可以保证在反复拆装的同时不影响模型组合的精确度,尺寸精确,同样也不易磨损,硬度很高,是目前最先进的拼装学习工具,为此,选用慧鱼组合模型对本产品进行搭建,在模拟实验的过程中也可以直接作为实物进行试验。主要的慧鱼零件包括组合好的固定底盘、螺旋杆、锥齿轮、支架、螺旋套、传动细杆、固定方块细小杆件等组成,同时产品结构包含步进电机、单片机电路系统等组成。
具体设计如图一所示,在结构底盘中间位置安装一个主锥齿轮,此锥齿轮一端与电动机输出轴相连接,由电动机接受的输入信号然后输出控制主锥齿轮的正转与反转,在主锥齿轮的端平面两侧分别与两个侧锥齿轮相啮合,侧锥齿轮两端分别控制着两侧与之连接的螺旋杆,
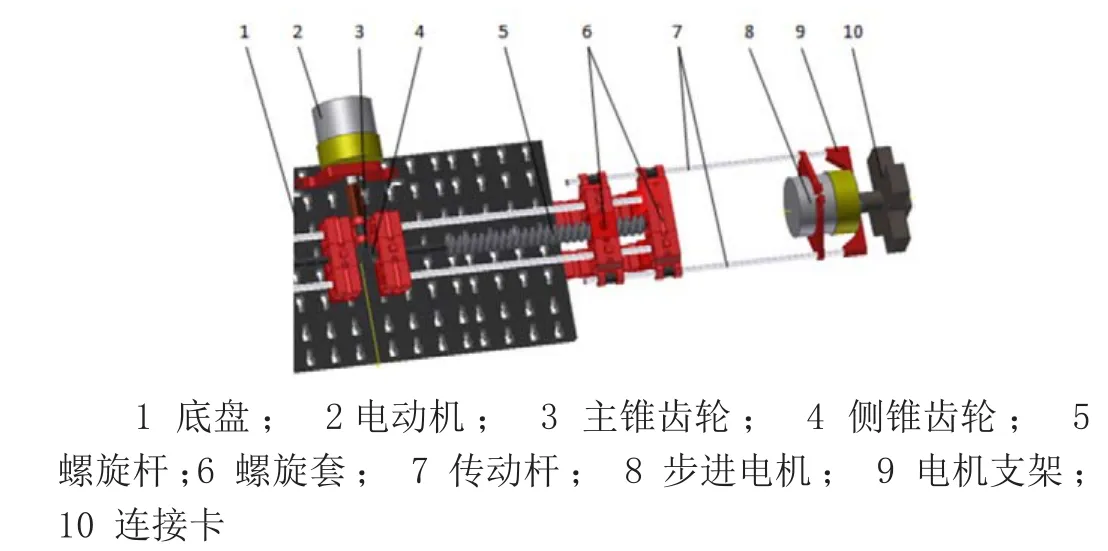
图一 变径机构结构图
在两边的两个螺旋杆上各啮合着一个螺旋驱动套,螺旋驱动套分别与两侧的蛋形轮子依托连接卡进行连接,从而实现两侧蛋形轮子的移动,向两侧伸展或者是收缩。
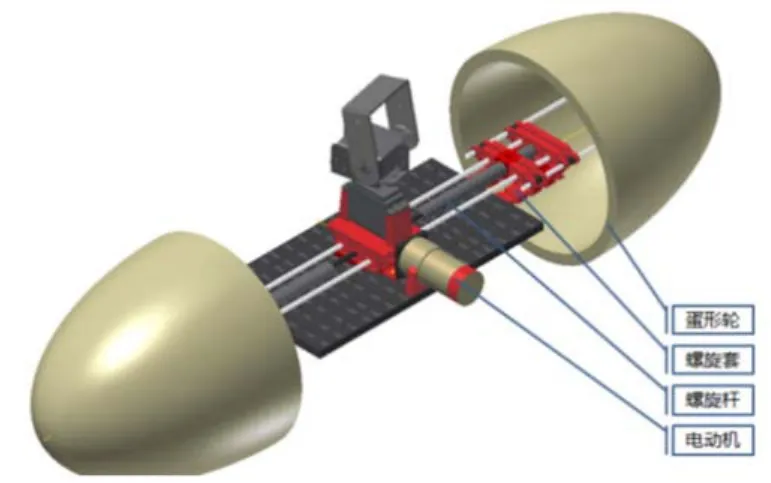
图二 产品三维结构设计模型(正方向)
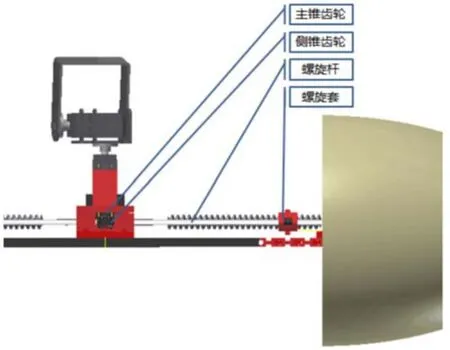
图三 产品三维结构设计模型(侧方向)

图四 可变径机构工作运动特性
3 功能实现
本产品可变径胶囊“蛋形”轮子机器人可变径设计结构是通过电动机接受单片机信号,由电动机控制着主锥齿轮的转动速度和转动方向,进而控制着两端侧锥齿轮和螺旋杆的运动特性,最后通过和螺旋杆相啮合的螺旋套以及和轮子相连接的连接卡来控制蛋形轮的运动,具体运动间的联系见下图:
4 运动学和力学分析
通过实验检测,在步进电机的驱动下,螺旋杆可以以7.458mm/s的速度向两边伸展。
蜗轮蜗杆的传递效率为n1=0.3~0.4,取中间平均值得n1=0.35;圆锥齿轮的传递效率为n2=0.88~0.92,取中间平均值得n2=0.90,减速比50:1的减速直流电机最大功率P=1.1W,所以:

其中v=7.458mm/s,得水平力F=23.23N。
以圆管中心建立直角坐标系,、椭圆轮中心到坐标系中心的竖直方向长度为n,椭圆轮向两端移动的距离为m,由matelab解得变径到最大位置的时候θ=,此时假设椭圆轮和圆管道交点为(x0,y0),

解得交点坐标为(308.339,254.808),
此时为了满足蛋形轮滚动半径大于40mm的条件,所以n〈214.808,即|y+n|〉40,
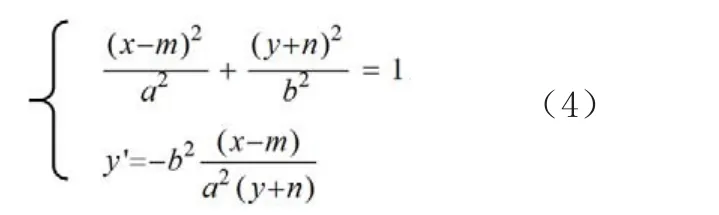
为了满足圆管道半径R的要求,以及从成本角度考虑,取最小壁厚值bmin=120mm,带入上述方程得:
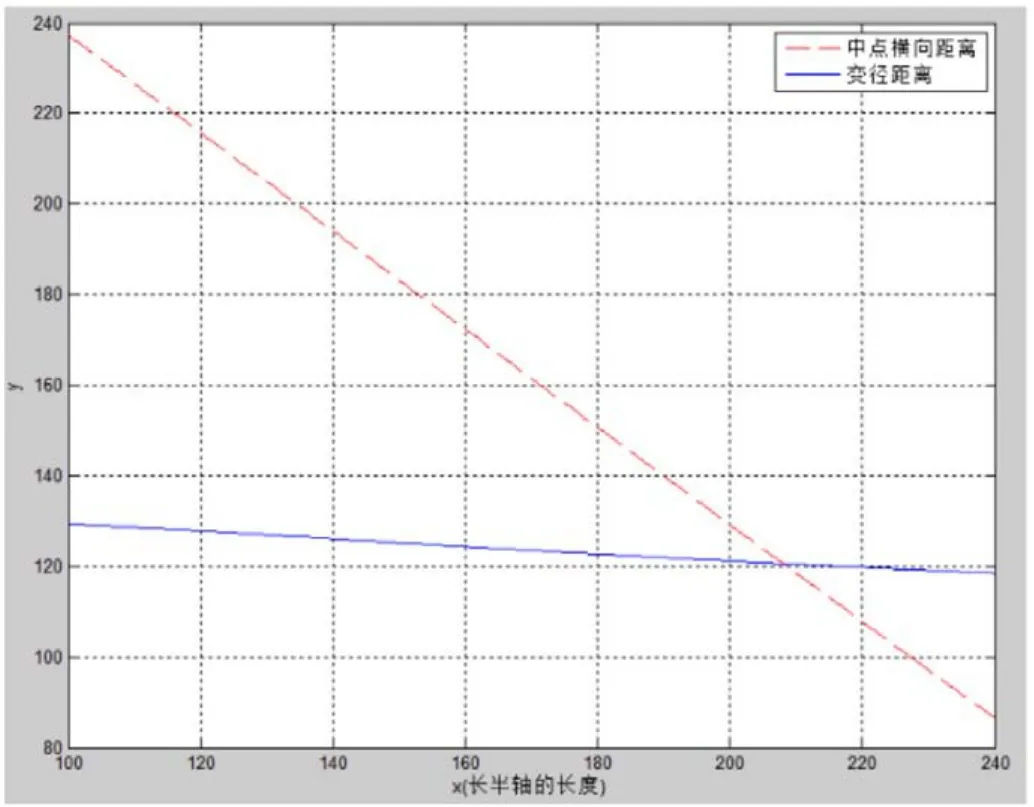
图五 matlab关于长轴长度和变径距离的关系

以a为变量,由上述方程综合编写matlab程序,得到如下关系图像:
通过图像可以看出,随着长半轴a长度的增加,中点横向距离和变径范围都随之减小,但是a的变化对变径距离的影响变化不大,所以取a=215,|y0+n|=50,此时m=113,最大变径距离为120。
5 从能量学角度考虑
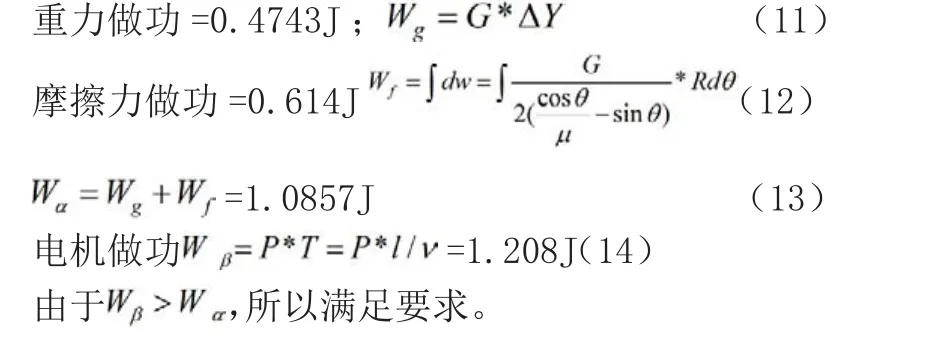
5.1 局部角度
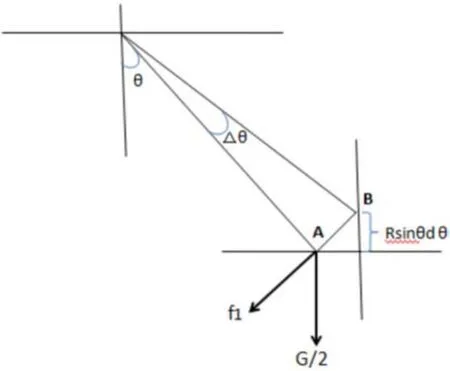
图六 相切点位置受力分析图
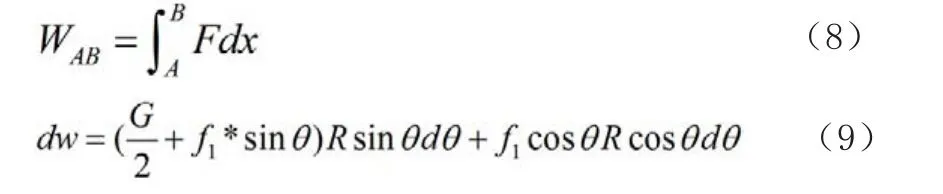
由于W〉WAB,所以满足使用要求。
5.2 整体角度
当变径距离为61的时候,椭圆轮和圆管道的交点坐标为(228.897,-328.034),此时
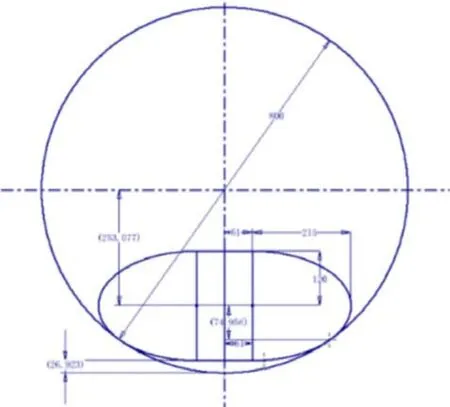
图七 最小变径时的轮子与轨道贴合图
机器人机构的重心坐标为(-253.007,0)。
当变径距离为120的时候,椭圆轮和圆管道的交点坐标为(308.194,-254.984),此时机器人机构的重心坐标为(-204.675,0)。
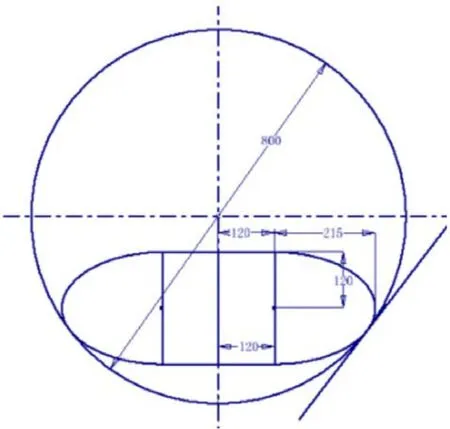
图八 最大变径时的轮子与轨道贴合图
6 实验测试
本产品在三维结构设计好之后,开始进行实物组件搭建,图九是产品的一个实际产品图,该产品利用慧鱼零件组合模型组装而成,开始进行一系列的实验测试,利用单片机控制电动机的转速以及转动方向,可以实现控制两端结构伸展的速度和长度,这种设计结构改变经机构能够很好地实现变径的功能,并且能够应用在管道探测机器人领域。
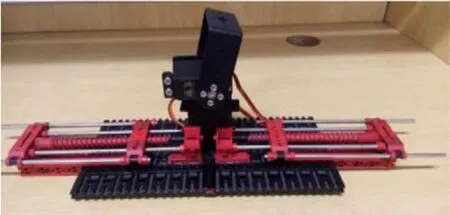
图九 产品实物组件图
7 结论
变径机构是管道探测机器人的重要组成部件,本产品通过融合胶囊“蛋形”结构,融合了新型的设计的可变径机构,经过理论证明和实验检测都能够很好的实现满足机器人变径的需求,也可以满足机器人在不同的管道探测环境的探测需求,极大地提升了携带的便利性以及空间的可利用性,并且可以代替人工在危险管道区域进行活动,因而具有很好的实用性价值。
参考文献
[1]邓宗全,陈军,姜元生,等. 六独立轮驱动管内检测牵引机器人[J].机械工程学报,2005,41(9):68—72
[2]Chio H R.Ryew S M. Robotic system with active steering capability for internal inspection of urban gas pipelines[J]. Mechatronics,2002,12(5):716—736
[3]陆麟,章亚男,沈林勇,钱晋武. 适应管径变化的管道机器人[J].机械设计报,上海大学 机电工程与自动化学院,1001-2354(2007)01-0016-04
Adjustable mechanism in the application of robot detection in the new "egg shaped" pipeline
Zhu Zhipeng,Wu Qilin,Shao Yuji,Zhang Dongsheng
(School of mechanical and automotive engineering,HeFei University of Technology,230009)
Abstract:In order to meet the different industrial environment of pipeline detection requirements,this paper introduces a novel pipeline detection reducing structure is based on stc90c51 SCM control system,a fusion capsule "egg shaped" structure design elements,in within the capsule "egg shaped" elliptic wheel, through the main cone gear,a side gear and screw mechanism system meshing transmission,by controlling the motor and the spiral rod rotation state of change for the egg shaped round to both sides of the linear motion,which can achieve the detection in the interior of the pipes can be reducing function.It can meet the demand of current exploration project is.
Keywords:variable diameter;egg shaped wheel;robot;pipeline;detection
猜你喜欢
文萃报·周二版(2021年51期)2021-01-02
今日农业(2020年22期)2020-12-25
中国特种设备安全(2019年3期)2019-04-22
畜牧与饲料科学(2018年7期)2018-07-31
畜牧与饲料科学(2018年6期)2018-07-09
陶瓷学报(2015年4期)2015-12-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
燃气轮机技术(2014年4期)2014-04-16
