
基于CAN总线的载波同步VSC并联控制方法
2016-05-24 15:02丁明,朱灿,陈忠,陈中,吴杰
电力自动化设备 2016年5期
丁 明,朱 灿,陈 忠,陈 中,吴 杰
(1.合肥工业大学 教育部光伏系统工程研究中心,安徽 合肥 230009;2.国网安徽省电力公司电力科学研究院,安徽 合肥 230022)
0 引言
随着可再生能源发电占整个电力系统发电量的比重不断提高,配置大容量储能系统以提高电力系统对大规模可再生能源发电的接纳能力受到学者的广泛关注[1-3]。
储能功率调节系统PCS(Power Conditioning System)作为直流系统与交流电网的接口,其主要实现储能系统双向功率调节以及其他辅助功能[4-5]。采用电压源换流器VSC(Voltage Source Converter)模块并联构成的储能PCS,在制造、运行和维护方面有较好的经济效益,但VSC模块并联带来控制的复杂性,尤其是共交直流母线结构,很容易引起模块间环流。环流会使并网电流畸变,增加损耗,降低系统效率[6-7],VSC模块间的硬件参数、控制参数、载波等是否一致均是环流产生的原因。模块间载波交错技术可以有效改善并联总电流质量,提高等效开关频率,降低无源滤波元件的体积和整个系统的费用,但对于共交直流母线VSC模块并联系统,载波交错导致模块间的开关控制不同步是产生环流的主要原因[8-10]。并网型VSC模块并联控制结构主要有集中式和分布式[11-13]。集中式控制通过一个主模块和多个从模块来实现,主模块主要负责功率环、电压环及电流环计算等功能,从模块主要负责脉宽调制及保护等功能,主从模块间需要进行大量快速的数据交换,从模块本身不能独立工作,可靠性低。分布式控制中所有模块均相同,不依赖任何模块及模块数,可实现冗余控制,模块间只需简单的数据交换,降低了对通信速率的要求,但基于无互连线的分布式控制结构实现起来比较复杂。
目前,VSC并联运行的同步控制模式有同步母线通信[14-15]、电力载波通信[16]和 CAN 总线通信[17-18],文献[15]中多个并联电源通过同步信号线实现模块间同步控制,但系统互连线较多,冗余性差。文献[17-18]中CAN总线仅用于系统控制量交换,未用于时间基准同步,效率低。CAN总线通信支持分布式控制和多主通信,只需一条总线即可实现全网络广播传送信息,互连线数目明显降低,较其他方式更适合VSC并联同步控制。
本文在上述集中控制基础上,结合分布式控制的特点,设计基于CAN总线的载波同步VSC并联控制方法。从模块对主模块的依赖程度降低,各模块独立进行闭环工作,利用CAN总线时间基准参考实现模块间较高精度的载波同步,主从模块间只进行载波同步信息的交互,通信效率有效提高,从而抑制模块间高频环流,同时引入模块自主监控机制,解决冗余控制复杂的问题,获得良好的动稳态性能。
1 VSC模块并联系统
VSC模块并联系统示意图如图1所示,VSC模块采用单电感滤波,模块间并联采用共交直流母线结构,交流侧并联后经过滤波电容,再通过△/Y型隔离变压器并网。VSC模块采用典型的双闭环控制结构,同时采用基于dq变换的锁相环同步电网电压。
图2为VSC模块并联系统结构图,并联系统由上位机和N个相同的VSC模块构成,并通过CAN总线互相连接。上位机接受上层调度并向各模块发送功率指令,各模块通过竞争遴选出一个主模块,其余均为从模块,主从模块间进行载波同步信息的交互,并在主从模块故障时,通过模块自主监控机制解决故障,保证模块间载波同步,提高系统的可靠性。
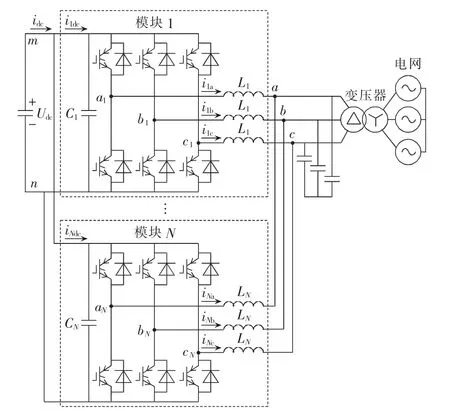
图1 VSC模块并联系统示意图Fig.1 Schematic diagram of parallel VSC modules

图2 VSC模块并联系统结构图Fig.2 Structure of system with parallel VSC modules
2 载波交错对并联系统环流影响
对于共交直流母线VSC模块并联系统,各个模块调制波、载波等不一致性因素,容易引起模块间环流。当VSC模块并联运行时,若每个模块控制器的时钟自由运行,载波相位将形成自由交错现象。下面以正弦脉宽调制(SPWM)技术为例,分析载波交错对VSC模块并联系统并网电流的影响,进而揭示载波交错对VSC模块间环流的影响。
2.1 载波交错引起模块间高频环流
以图1中2个VSC模块并联系统为例,各模块均采用SPWM。载波交错现象如图3所示,假设2个VSC模块的调制波相同,图3给出了一个载波周期内VSC模块各自的驱动波形,可见在零矢量的重叠区域 000-111、111-000、000-111,2 个 VSC 模块间将形成环路 m-a1-a-aN-n、m-b1-b-bN-n、m-c1-ccN-n。在直流母线电压的激励下,将同时对滤波电感进行充电或放电,此时VSC模块三相电流中将出现环流;而在其他区域001-101、101-001,只有m-a1-a-aN-n、m-b1-b-bN-n、m-c1-c-cN-n 中的部分形成环流通路,在直流母线电压的激励下,也将形成环流。
实际系统中,即使2个VSC模块的调制波一致,若VSC模块PWM均采用在三角载波下溢点采样,由于载波交错,将导致其中一个VSC模块相比于另一个VSC模块的调制波超前或滞后一个交错角度,即在同一个时段对应的载波周期内,调制波也存在偏差,这将进一步增大环流。下面将仿真验证所述载波交错对模块间环流的影响。
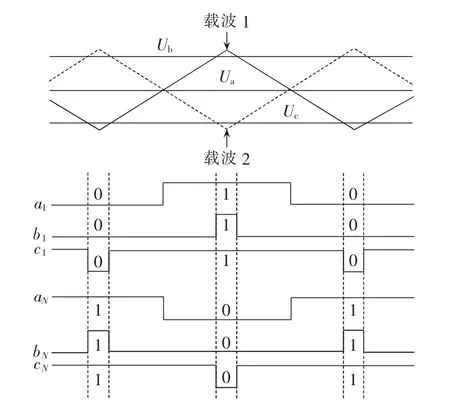
图3 载波交错现象Fig.3 Phenomenon of carrier interleave
2.2 载波交错对模块间环流影响仿真验证
以2台VSC模块并联系统为例,验证载波交错对环流的影响。在MATLAB中搭建仿真电路模型,仿真参数如下:直流侧电压Udc=650 V,电网频率为50 Hz,滤波电感L=2 mH,滤波常数为10-4s,滤波电阻 R=0.01 Ω,dq 调节器参数 Kp=0.035、Ki=100,开关频率fs=10 kHz,电网电压为380 V。假设模块的初始状态相同,给定参考量均为0。
图4为载波交错时VSC模块并联系统的电流波形,从上至下依次为VSC模块并联总电流ia、VSC模块1电流i1a、VSC模块2电流i2a、VSC模块1环流ic1a和VSC模块2环流ic2a。其中VSC模块1与VSC模块2的载波相差180°;2个VSC模块输出有功电流给定均为30 A,无功电流给定均为0。可见当VSC模块载波交错时,将出现明显的高频环流。
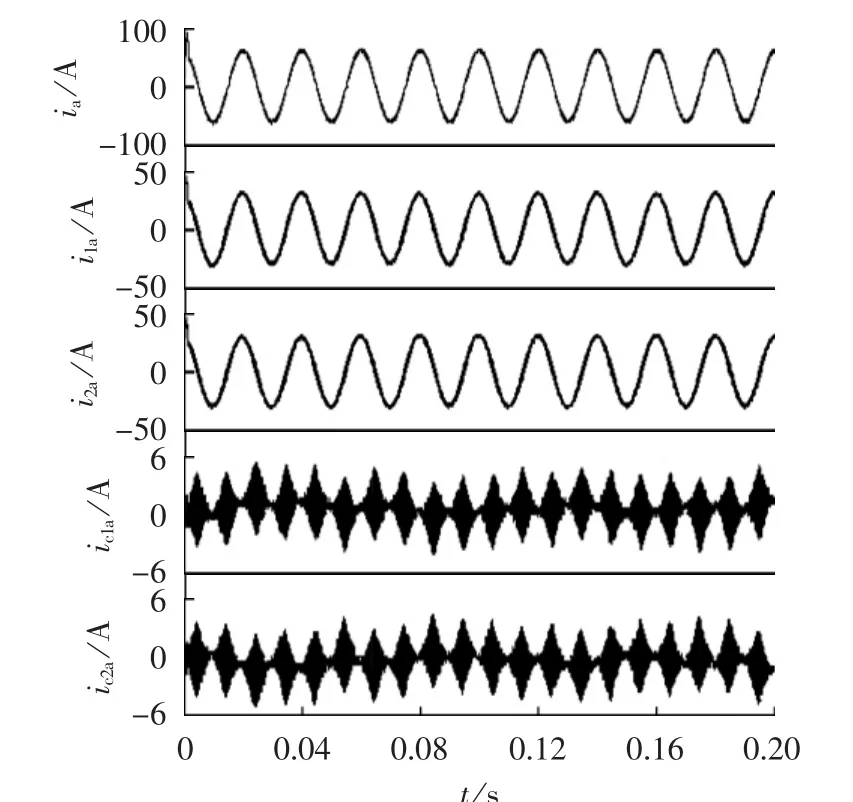
图4 载波交错时VSC模块并联系统电流波形Fig.4 Current waveforms of system with parallel VSC modules for interleaved carriers
图5为载波同步时VSC模块并联系统的电流波形,其中VSC模块1、VSC模块2输出有功电流给定均为30 A,无功电流给定均为0。由图5可见当VSC模块载波同步时,高频环流明显减小。
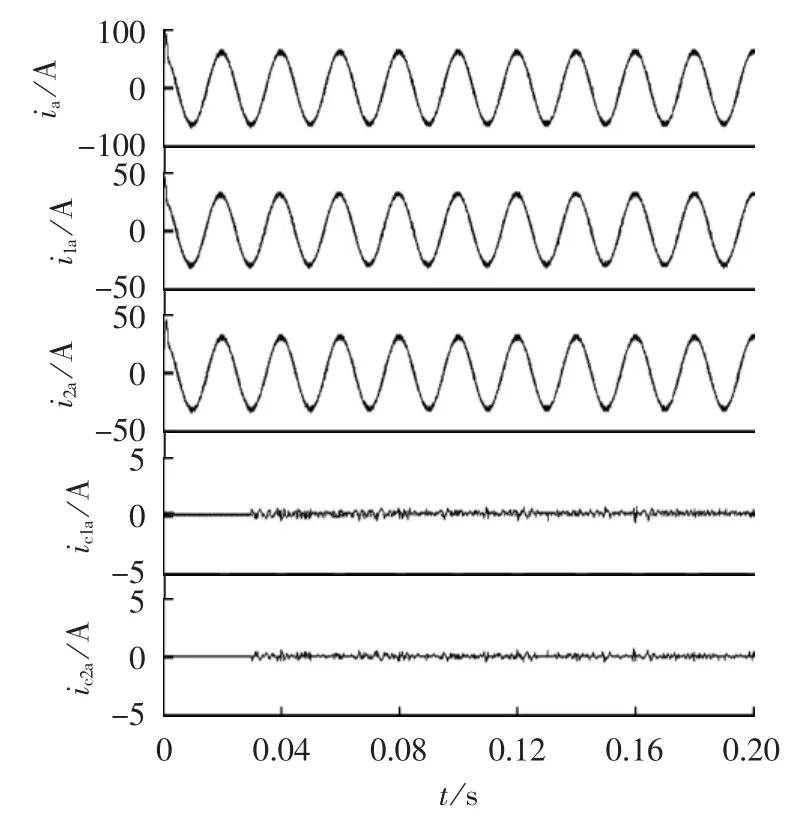
图5 载波同步时VSC模块并联系统电流波形Fig.5 Current waveforms of system with parallel VSC modules for synchronized carriers
基于上述理论分析及仿真结果可以看出,共交直流母线VSC模块并联系统中载波交错现象将产生高频环流。高频环流的存在很容易引起模块的过流保护,因此载波同步与否尤为关键。下面将介绍基于CAN总线的载波同步实现方法。
3 基于CAN总线的载波同步设计
本文采用CAN总线作为VSC模块并联系统载波同步的通信手段。通过一条CAN总线完成模块间载波同步等信息的通信,采用较少的互连线实现VSC模块并联系统控制。
3.1 并联系统控制时序
VSC模块并联系统中每个模块配置独立的DSP控制器,采用下溢中断处理采样、闭环控制算法和通信程序。VSC模块并联系统主从控制时序如图6所示。根据SPWM控制特点,主从模块在第k-1个载波周期下溢点独立采样并计算出第k+1个载波周期的输出参考,占空比计算结果在第k个载波周期下溢时输出,如图6中tm1、ts1时段。主模块在tm2时段向从模块发送载波同步信号,从模块在ts2时段接收主模块的载波同步信号,并在下一周期与主模块载波同步,主模块每4个载波周期发送一次载波同步信号,保证主从模块载波同步的实时性。图6中tm3和ts3时段用于模块自主监控及功率指令的发送。
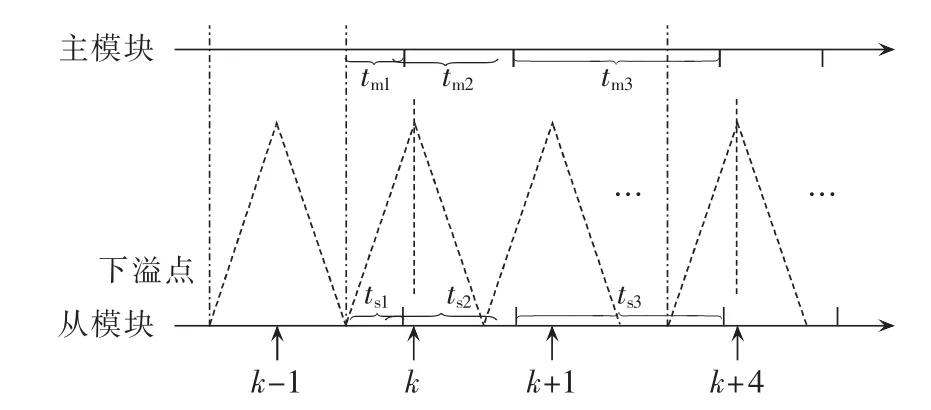
图6 VSC模块并联系统主从控制时序Fig.6 Timing of master-slave control for system with parallel VSC modules
3.2 硬件设计
VSC模块并联系统硬件结构如图7所示,主要包括主电路、IGBT驱动电路以及DSP主控板(AD采样电路、CAN控制器、PWM控制电路)等。采用高速 DSP(Digital Signal Processing)TMS320F28335,该芯片自带2通道含32个邮箱的增强型CAN模块。为了保证数据通信稳定性,采用ADI公司隔离式CAN芯片ADM3053作为收发器,终端加接120 Ω匹配电阻[19],信息传输采用CAN2.0通信协议,双绞线传输介质。
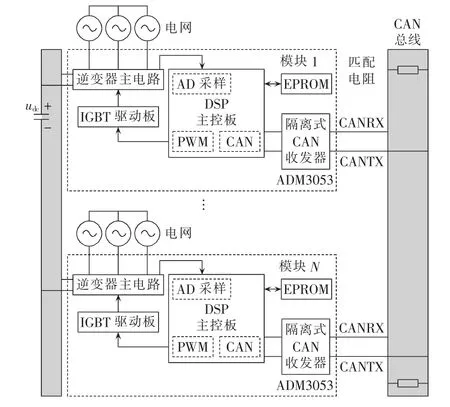
图7 VSC模块并联系统硬件结构Fig.7 Hardware structure of system with parallel VSC modules
3.3 CAN总线初始化设计
CAN总线的初始化,主要包括对CAN中断、引脚设置、定时器设置、波特率设置、邮箱初始化等。设置CAN报文为8个字节扩展帧,采用1 Mbit/s的速率,保证通信的实效性。CAN模块邮箱配置包括远程帧接收应答邮箱、广播信号帧接收应答邮箱、载波同步数据帧接收应答邮箱以及可配置接收发送邮箱。
3.4 载波同步原理
由于CAN总线上所有节点的时钟寄存器均可以对总线上的位时钟进行同步计数,因此采用CAN时钟寄存器作为载波同步时间基准参考[19]。总线上一旦有数据流发生,各节点通过内部的数字锁相环,提取位时钟进行计数,即使总线空闲,锁相环仍能通过锁住的信号继续计数,直到新的数据流通过总线,又重新对新的位时钟进行计数,各节点的CAN总线计数值进行统一归零。由于是共享的通信线路,各节点时钟寄存器对位时钟的计数同步,相同时间计数值相等,从而得到载波同步参考。
要获得图6的主从控制时序,需要一个建立同步并保持的机制,载波同步建立过程如下。
第一个模块上电后,通过邮箱发送一个远程帧,并要求其余模块发送响应信息,由于是第一个模块,得不到响应,固定时间后,自动设置为主模块,并备好远程应答数据,此时不调节载波周期。第二个至第N个模块上电后,同样发送远程帧,由于有主模块的存在而收到应答帧,设置为从模块。初始化主从地位建立流程如图8(a)所示。
主模块查询到自身有远程应答信号,确定有从模块加入,通过邮箱广播发送一个CAN总线时钟清零的载波同步数据帧,将总线上所有节点的时钟寄存器清零,同时各节点的时钟寄存器对总线上共同的位时钟同步计数;从模块收到载波同步数据帧后,进入中断响应,微调载波周期,置软件同步标志位,同时启动PWM输出新的占空比。
载波同步信号在并联模块间传输距离不同,各模块DSP以及晶振之间也有微小的差别,导致工作过程中载波周期存在差异,因此每次下溢中断时各从模块需要根据共同的参考微调自身载波周期。本文中载波周期为100 μs,每4个载波周期同步一次,对应1 Mbit/s标准的CAN总线位时钟值为400。从模块每次接收到主模块发送的载波同步信号后,先采样自身CAN总线位时钟值再与标准的位时钟值作差比较,得到的差值反映了偏离参考周期的长短,差值为正表示自身的载波周期比参考标准短,差值为负表示自身的载波周期比参考标准长。进而反向微调载波周期值,即可保持主从模块实现较高精度的载波同步,同步误差控制在0.5 μs以内。主从模块载波同步流程如图8(b)所示。

图8 初始化主从地位建立及载波同步流程图Fig.8 Flowchart of master-slave initialization and flowchart of carrier synchronization
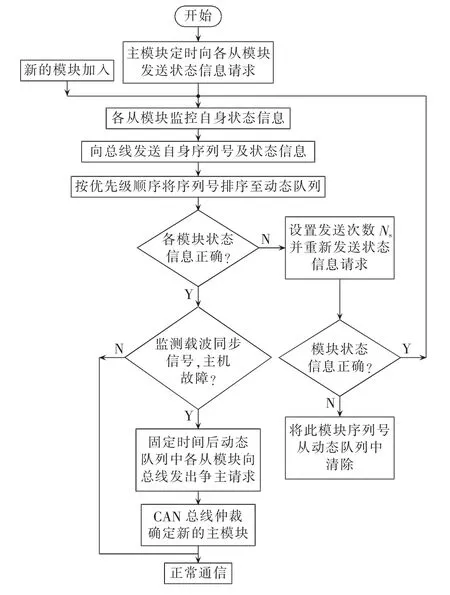
图9 模块自主监控机制流程图Fig.9 Flowchart of independent module monitoring mechanism
为了保证主模块的存在及可靠运行,避免主模块故障失效时,从模块因无法与总线连接或无法检测到故障而影响主模块的重新确定,在传统主从控制基础上引入模块自主监控机制,整个系统不会因为主模块的故障而瘫痪。模块自主监控机制流程图如图9所示,各模块上电主从地位建立后,从模块监控自身状态信息,此状态信息为CAN错误状态寄存器的数值[19],将此状态信息连同自身序列号发送到总线,同时接收其他从模块的状态信息。每个模块有一个独立的序列号,并按序列号优先级顺序依次排入动态队列,模块组网后定时更新模块动态队列,主模块在每个交流电源周期向从模块发送模块状态信息请求。若某个从模块没有响应或状态信息错误,设置发送次数Ns,重新发送状态信息请求,若仍然没有响应或状态信息错误,则确认此模块丢失或故障,将此模块序列号从动态队列中清除,若收到响应信号,则重新检测模块信息是否正确,若有新的从模块加入或故障的从模块恢复正常,则将其加入此动态队列,保证动态队列中从模块均为正常工作模块。当主模块丢失或故障时,动态队列中的从模块向总线发出争主请求,由总线仲裁确定新的主模块,系统可靠性大幅提高。
4 实验验证
根据本文所提方法研制了2台基于VSC模块并联的储能PCS样机,并进行实验验证。每台VSC模块含独立的直流滤波电容、主电路、DSP控制器和滤波电感,在模块耦合点并联后经滤波电容和变压器并入380 V配电网,直流侧为650 V/75 kW·h电池储能系统。
图10为VSC模块并联运行时主模块向CAN总线发送的载波同步信号(其中下图为上图点划线框部分的放大图,后同),每4个载波周期发送一次,保证主从模块载波同步。图11为主从模块同一时刻载波周期信号波形,从放大窗口可以看出一致性较好,载波同步误差控制在0.5 μs以内,能够满足VSC并联控制对载波同步精度要求。

图10 载波同步信号波形Fig.10 Waveforms of carrier synchronization signal
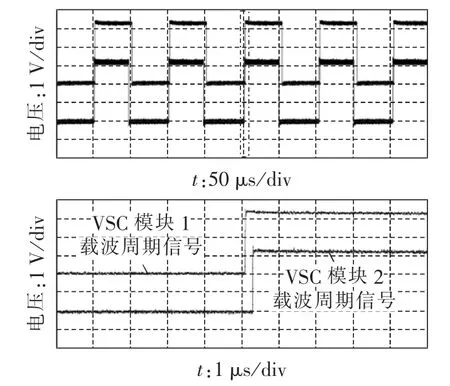
图11 主从模块同一时刻载波周期信号波形Fig.11 Waveforms of periodic carrier signal of master and slave modules at same time
图12为VSC模块载波同步并联运行实验波形。VSC模块1、VSC模块2的有功给定为3.5 kW,无功给定为0。其中图12(a)给出了模块电感电流和模块间环流波形,图12(b)给出了模块电感电流和模块并联电流波形。由图12可以看出,2台共交直流母线VSC模块并联系统模块间高频环流得到了有效抑制,稳态性能良好。
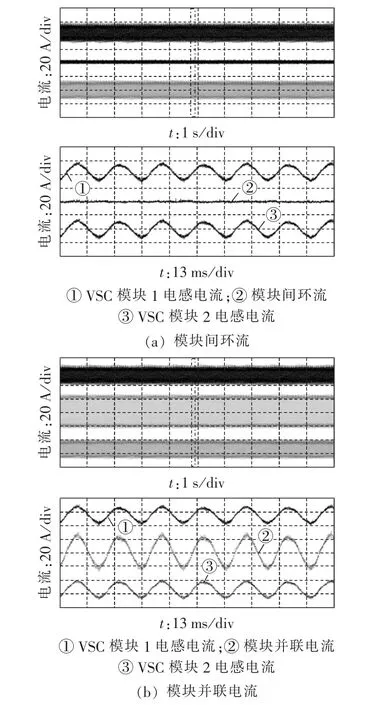
图12 VSC模块载波同步并联运行实验波形Fig.12 Experimental waveforms of parallel VSC modules with carrier synchronization
图13为VSC模块并联运行时功率突变实验波形。图13(a)中2台VSC模块初始功率均为0,同时突增有功至3.5 kW。图13(b)中2台VSC模块初始有功给定为3.5 kW,同时突降至0.2 kW。图13(c)中单台VSC模块有功给定从0突增至3.5 kW,图13(d)中单台VSC模块有功给定从3.5 kW突减至0。由图13可以看出,2台共交直流母线VSC模块并联系统功率突变瞬间模块并联电流没有发生明显的突变,动态性能良好。

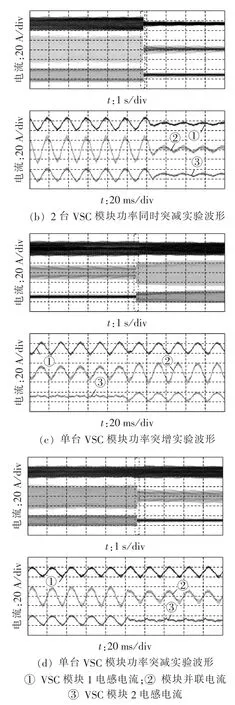
图13 VSC模块并联运行时功率突变实验波形Fig.13 Experimental waveforms of parallel VSC modules with active power mutation
5 结论
本文针对储能PCS中共交直流母线并联运行VSC模块的高频环流抑制问题,通过分析载波交错对并联系统环流的影响,引入模块自主监控机制,设计了一种基于CAN总线的载波同步实现方法。实验结果表明:
a.采用本文所提基于CAN总线的载波同步方法,共交直流母线VSC模块并联系统中载波同步误差不超过0.5%,模块间高频环流得到有效抑制,系统动稳态性能良好;
b.通过建立模块自主监控机制,解决了主从控制结构中冗余控制性能不佳的问题,实现模块的快速自由投切,系统可靠性大幅提高,同时各VSC模块均相同,易于大容量模块化扩展,具有良好的工程可实现性。
[1]颜伟,吕冰,赵霞,等.含高渗透率风电配网中电池储能系统和开关的协调规划[J]. 电力自动化设备,2015,35(3):6-11.YAN Wei,LÜ Bing,ZHAO Xia,et al.Coordinated allocation of BESS and controllable switches in distribution system with high penetration of wind power[J].Electric Power Automation Equipment,2015,35(3):6-11.
[2]XIE L,CARVALHO P M S,FERREIRA L A F M,et al.Wind integration in power systems:operational challenges and possible solutions[J].Proceedings of the IEEE,2011,99(1):214-232.
[3]杨堤,程浩忠,马紫峰,等.基于储能技术提高风电机组低电压穿越能力的分析和展望[J]. 电力自动化设备,2015,35(12):1-10.YANG Di,CHENG Haozhong,MA Zifeng,etal.Analysisand prospect of LVRT improvement based on energy storage technology for wind turbine generator system[J].Electric Power Automation Equipment,2015,35(12):1-10.
[4]李斌,宝海龙,郭力.光储微电网孤岛系统的储能控制策略[J].电力自动化设备,2014,34(3):8-15.LI Bin,BAO Hailong,GUO Li.Strategy of energy storage control forislanded microgrid with photovoltaic and energy storage systems[J].Electric Power Automation Equipment,2014,34(3):8-15.
[5]丁明,陈忠,苏建徽,等.可再生能源发电中的电池储能系统综述[J]. 电力系统自动化,2013,37(1):19-25.DING Ming,CHEN Zhong,SU Jianhui,et al.Review of battery energy storage system for renewable energy[J].Automation of Electric Power Systems,2013,37(1):19-25.
[6]肖华根,罗安,王逸超,等.微网中并联逆变器的环流控制方法[J]. 中国电机工程学报,2014,34(19):3098-3104.XIAO Huagen,LUO An,WANG Yichao,etal.A circulating current control method for paralleled inverters in microgrids[J].Proceedings of the CSEE,2014,34(19):3098-3104.
[7]张建坡,田新成,尹秀艳.模块化多电平换流器直流输电控制策略[J]. 电力自动化设备,2015,35(11):103-108.ZHANG Jianpo,TIAN Xincheng,YIN Xiuyan.Control strategy of MMC-HVDC[J].Electric Power Automation Equipment,2015,35(11):103-108.
[8]ZHANG D,WANG F,BURGOS R,et al.Common-mode circulating current control of paralleled interleaved three-phase two-level voltage-source converters with discontinuous space-vector modulation[J].IEEE Transactions on Power Electronics,2011,26(12):3925-3935.
[9]ASIMINOAEI L,AELOIZA E,ENJETI P N,et al.Shunt active-power-filter topology based on parallel interleaved inverters[J].IEEE Transactions on Industrial Electronics,2008,55(3):1175-1189.
[10]XING K,LEE F C,BOROJEVIC D,et al.Interleaved PWM with discontinuous space-vector modulation[J].IEEE Transactions on Power Electronics,1999,14(5):906-917.
[11]PEREZ-LADRON G,CARDENAS V,ESPINOSA G.Analysis and implementation of a master-slave control based on a passivity approach for parallel inverters operation[C]∥Proceedings of IEEE International Power Electronics Congress.Puebla,Mexico:IEEE Press,2006:1-5.
[12]肖飞,付立军,谢桢.电力电子分布式数字控制网络的同步策略对比分析[J]. 电力系统自动化,2012,36(13):81-85.XIAO Fei,FU Lijun,XIE Zhen.Contrastanalysison synchronization strategies for power electronic distributed digital control network[J].Automation of Electric Power Systems,2012,36(13):81-85.
[13]方天治,阮新波,肖岚.分布式三相逆变器冗余并联系统[J].南京航空航天大学学报,2012,46(6):840-846.FANG Tianzhi,RUAN Xinbo,XIAO Lan.Distributed redundant parallel three-phase inverters system[J].Journal of Nanjing University of Aeronautics&Astronautics,2012,46(6):840-846.
[14]SCHELLEKENS J M,DUARTE J L,HUISMAN H,et al.Fastshared current transient response in high-precision interleaved inverters[J].IEEE Transactions on Power Electronics,2011,26(11):3308-3317.
[15]GUERRERO J M,HANG Lijun,UCEDA J.Control of distributed uninterruptible power supply systems[J].IEEE Transactions on Industry Electronics,2008,55(8):2845-2859.
[16]何中一,王笑娜,邢岩.基于电力线通信的逆变器并联系统同步控制方法[J]. 中国电机工程学报,2008,28(33):25-29.HE Zhongyi,WANG Xiaona,XING Yan.Synchronization control for inverters in parallel operation based on power line communication[J].Proceedings of the CSEE,2008,28(33):25-29.
[17]李锐,蔡涛,段善旭,等.模块化直流电源系统CAN网络的设计与实现[J]. 电工技术学报,2011,26(1):182-187.LIRui,CAITao,DUAN Shanxu,etal.Design and implementation of CAN-bus in modular DC-DC power system [J].TransactionsofChinaElectrotechnicalSociety,2011,26 (1):182-187.
[18]WANG Hongliang,YUE Xiumei,PEI Xuejun,et al.The CAN bus monitor system for the three phase inverters[C]∥International Conference on Electrical Machines and Systems.Tokyo,Japan:IEEE Press,2009:1-4.
[19]刘俊顺,高艳丽,张树团,等.TMS320F28335 DSP原理与开发编程[M]. 北京:北京航空航天大学出版社,2011:377-380,387-388.
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
中学生数理化·中考版(2021年10期)2021-11-22
通信电源技术(2018年5期)2018-08-23
制造技术与机床(2017年6期)2018-01-19
中国环境监察(2016年7期)2016-10-23
儿童故事画报·智力大王(2016年6期)2016-09-14
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15
系统工程学报(2015年5期)2015-02-28
