用于磁性微机器人的外磁场调控系统设计与研制
2016-05-25 00:37魏树峰陈昌友徐建省张玉霞
电工电能新技术 2016年2期
王 馨, 魏树峰, 陈昌友, 徐建省, 张玉霞, 宋 涛
(1. 中国科学院电工研究所生物电磁学北京市重点实验室, 北京 100190; 2. 中国科学院大学, 北京 100049)
用于磁性微机器人的外磁场调控系统设计与研制
王 馨1,2, 魏树峰1, 陈昌友1,2, 徐建省1, 张玉霞1, 宋 涛1
(1. 中国科学院电工研究所生物电磁学北京市重点实验室, 北京 100190; 2. 中国科学院大学, 北京 100049)
随着微机器人的发展,磁性微机器人凭借其能源供给的优势得到广泛应用。由于研究对象不断向微细化发展,本文结合显微镜环境设计了一种用于磁性微机器人的外磁场调控系统。本系统主要由上位机、磁场控制模块和图像显示模块三部分构成。磁性微机器人是通过线圈装置产生的外磁场来控制的,本文设计的线圈装置能够在线圈中心40mm×30mm的平面区域产生0~1mT的沿水平方向的静磁场和频率为0~50Hz、幅值0~1mT的旋转磁场,能够实现对磁性微机器人直线运动和旋转运动的控制。本文使用BX53显微镜对磁性微机器人的运动进行放大,实现其运动的实时显示和追踪。本文还编写了一套控制软件来实现上述控制功能和实时显示功能。
磁性微机器人; BX53显微镜; 运动控制系统; 电磁线圈
1 引言
微型机器人,尤其是进入人体的无线内窥镜和可用于体内诊疗的微机器人的发展和应用已成为国内外机器人研究的热点[1]。微机器人可在药物输送、疾病检测、靶向治疗特别是癌症治疗等方面发挥重要的作用[2]。
微型机器人的发展急需解决驱动能源的供给问题[3]。近年来国内外不少学者提出利用外场能量来作为微型机器人的驱动能源,并取得了进展。外场能量有微波、磁场、超声波和光波等,其中应用比较多的是磁场[4]。磁场驱动的微机器人结构简单,易于控制,得到了较广泛的应用。一般的外磁场调控的微型机器人内部具有固有磁矩(大多采用永磁块),通过控制外部的磁场可以调节其姿态;通过施加旋转磁场带动具有螺旋结构的微型机器人,从而产生推进力[5]。
然而,随着纳米技术的迅猛发展,研究对象不断向微细化发展,一些医学、生物学等领域的精细操作都离不开高精度的微机器人系统,这便需要高倍频、高分辨率的显微视觉系统的辅助。因此与显微镜结合的电磁控制系统是对磁性微机器人进行调控的关键。
趋磁细菌是一类能够沿着磁力线运动的特殊细菌,其体内含有呈链状排列的单磁畴颗粒;将趋磁细菌与功能部件结合即构成趋磁细菌机器人[6]。本文针对趋磁细菌机器人设计并研制了一套与显微成像结合的外磁场调控系统,能够在显微镜下对趋磁细菌机器人进行观察并进行运动轨迹的控制。
2 系统设计
本控制系统主要由三部分组成:上位机、磁场控制模块和图像显示模块,如图1所示。上位机完成对整个系统的控制,并且提供直观的信息服务和决策支持,主要包括恒定磁场控制模块、交变磁场控制模块、磁场手动控制模块和显微图像实时显示模块。由于趋磁细菌会沿着磁场的方向泳动,通过磁场控制模块可以实现对趋磁细菌机器人的有效控制。该模块是本控制系统的核心部分,其主要由正交线圈对、数据采集卡和稳压直流源构成。通入线圈中的电流大小由上位机给出,然后将数据传输到数据采集卡,通过数据采集卡控制稳压直流电源每一路输出电流的大小,从而实现对线圈产生磁场的控制。图像显示模块的功能是通过正置显微镜BX53上安置的网络摄像机来实现的,观察目标经过目镜的放大,通过网络摄像机将观察目标的光学信号转化为图像信号并传输到上位机,当观察目标的运动偏离观察视野时,可调节三维移动平台的位置保持观察目标在视野范围之内。采用图像显示界面和磁场控制界面相结合,可以更方便地对观察目标进行实时观察和运动控制。
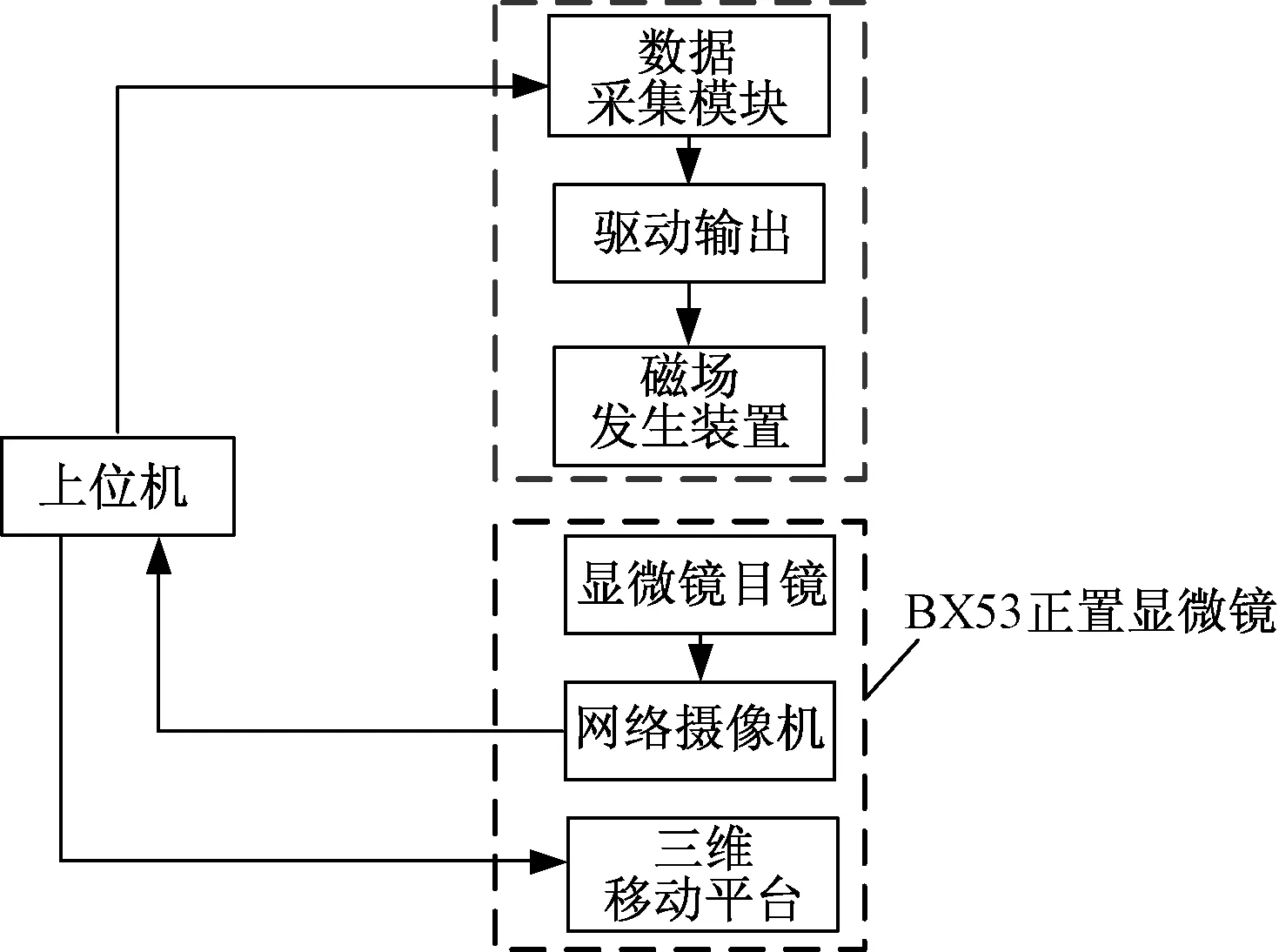
图1 控制系统的结构图Fig.1 Structure diagram of system
3 磁场产生装置
3.1 线圈的设计与测试
本文根据所使用的BX53显微镜的结构设计了一套线圈装置。设计的线圈要满足在载玻片所在的平面区域内产生0~1mT的任意水平方向的均匀磁场,而且线圈不能影响显微镜的正常操作,另外线圈还要便于安装。根据上述要求,本文设计了一套置于显微镜外围的矩形正交线圈对。该线圈装置总共有4组线圈,如图2所示。其中A、B两组线圈分别产生沿X轴正方向和负方向的磁场,C、D两组线圈分别产生沿Y轴正方向和负方向的磁场。4组线圈分别由4路独立可调的恒流电源驱动,通过调节4组线圈中的电流,即可产生所需的任意方向的水平磁场。为了更加方便地控制磁场,本系统中增加磁场手动控制模块,利用操纵杆手动控制磁场的方向和大小,在实际操作中可自主选择设定磁场数值模式或手动控制模式,提高系统控制磁场的灵活性。另外可以通过软件控制产生0~50Hz极低频的旋转磁场,不同于控制驱动微机器人的旋转磁场,该旋转磁场主要用来实现在X-Y平面内趋磁细菌机器人的停止控制。在实际操作中,可以根据需要选择输出恒定磁场或旋转磁场,并将所需的磁场值输入给上位机,利用数据采集卡将数字量转化为模拟量,控制直流稳压电源对四组线圈进行激励便可以产生所需的磁场。本文所设计的线圈的结构如图3所示,具体参数如表1所示。

图2 磁场发生装置示意图Fig.2 Schematic diagram of magnetic field generator

图3 线圈结构图Fig.3 Structure diagram of coils
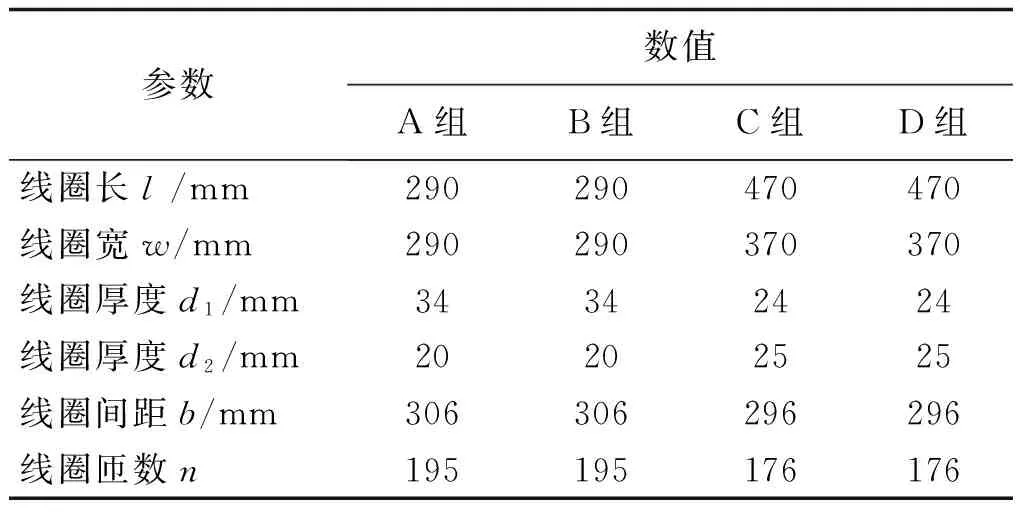
参数数值A组B组C组D组线圈长l/mm290290470470线圈宽w/mm290290370370线圈厚度d1/mm34342424线圈厚度d2/mm20202525线圈间距b/mm306306296296线圈匝数n195195176176
本文根据上述设计制作了一套实际线圈,并搭建了一套控制系统,如图4所示。线圈骨架使用环氧树脂板制作。A、B两组线圈具有相同的尺寸,因此本文采用双线绕制的方法将A、B绕制在同一个线圈骨架上,这样可以保证A、B两组线圈具有相同的磁场分布。A组线圈和B组线圈分别通入方向相反的激励电流从而产生方向相反的磁场。C、D两组线圈同样采用双线绕制的方法制作。线圈用线径为1.06mm的漆包线绕制而成。本文采用DH1715A-5直流稳压稳流电源对线圈进行驱动,电源的最大输出电流为3A,最大输出电压35V,输出电流的稳定度0.05%。
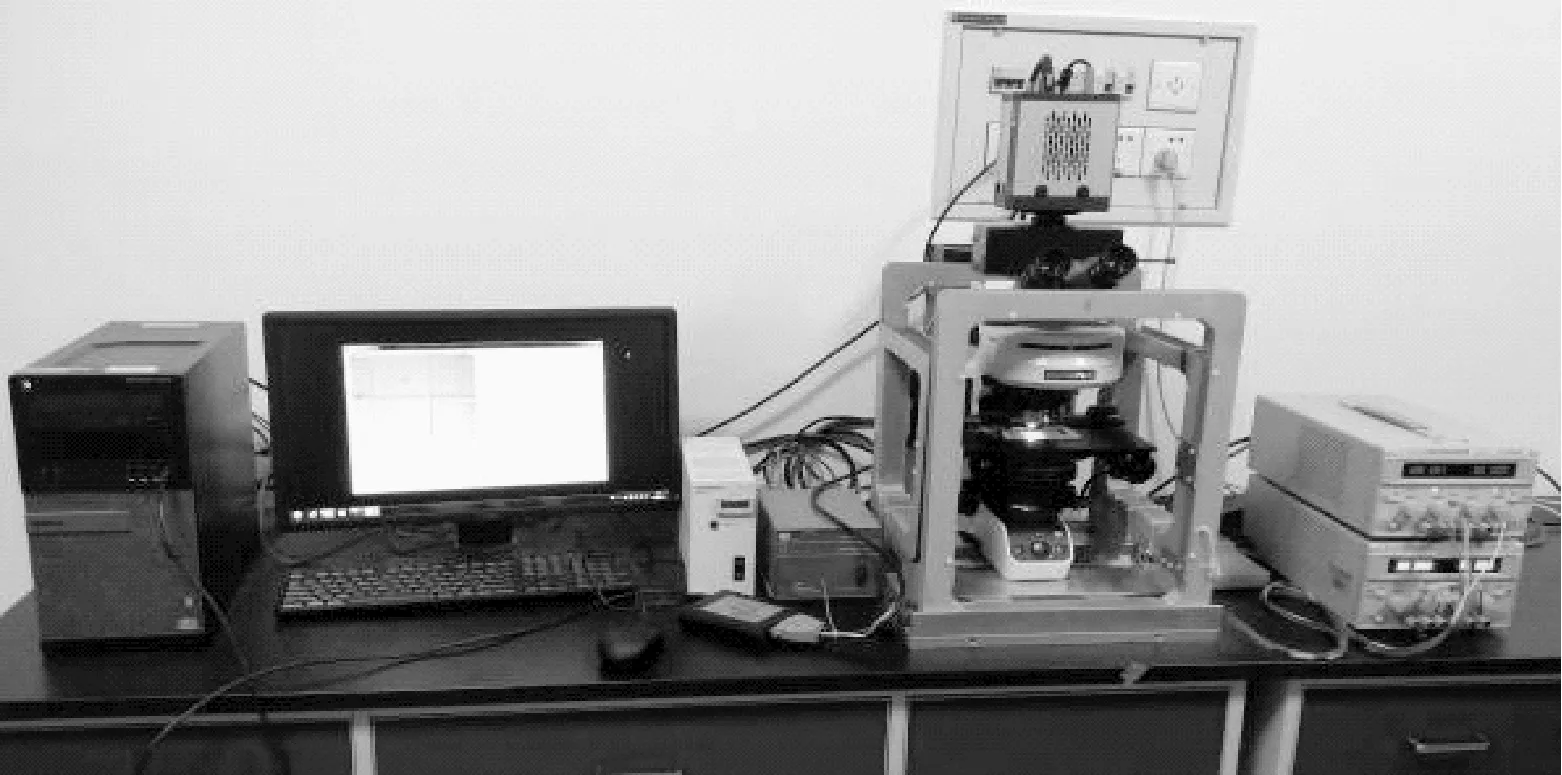
图4 系统实物图Fig.4 Photograph of system
在线圈制作完成后,对线圈的性能进行了测试。利用TMF-1数字三轴磁强计(北京空间宇达科技有限公司)对所制作的线圈产生磁场的分布进行了测量。测量区域为线圈中心区平面(Z=0)40mm×30mm的区域,在该平面区域内每隔5mm选取一个测量点进行测量。分别测量了A、B线圈产生的X方向磁场和C、D线圈产生的Y方向磁场,在每一个测量点分别测量线圈通电流和不通电流两种状态下的磁场值,然后做差消除背景磁场分量,对测量结果归一化后的结果如图5所示。由图可知,A组和B组线圈产生磁场的最大偏差不超过2.5%,C组和D组线圈产生磁场的最大偏差都不超过0.6%。测量结果表明线圈具有较好的均匀性,所制作的线圈满足设计要求。当线圈A和B通入3A电流时,测得线圈中心位置的磁场为1.3mT;当线圈C和D通入3A电流时,测得线圈中心位置的磁场为1.6mT。结果表明,所设计的线圈可达到在平面区域内产生0~1mT均匀磁场的设计要求。
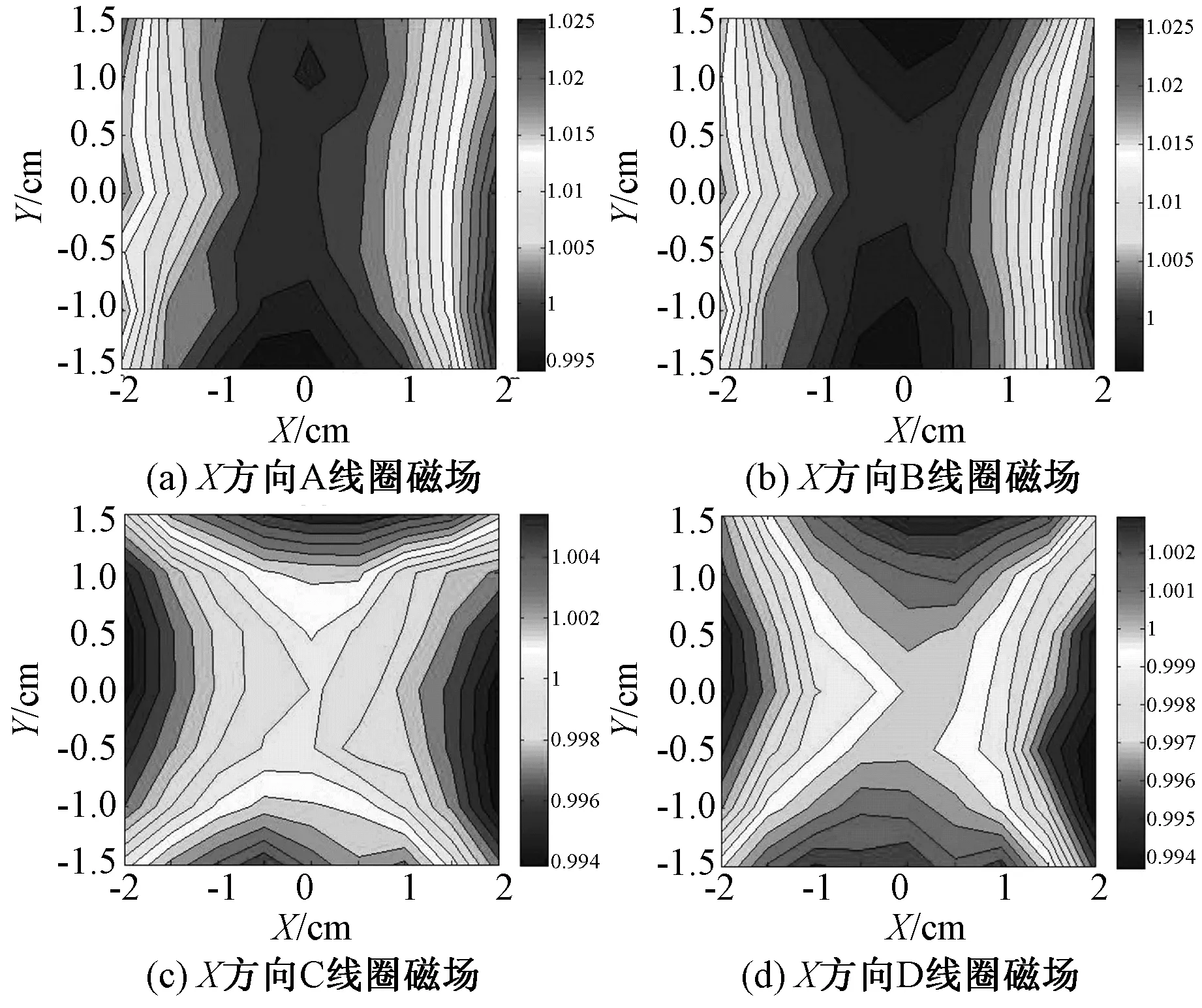
图5 线圈实际测量结果图Fig.5 Measuring results of magnetic field distribution
3.2 旋转磁场的生成
为了实现对趋磁细菌机器人的停止控制,可以在X-Y平面施加一个旋转磁场,使其在一个小的区域内旋转而停止前进。由于本文中所设计的线圈为平面内的正交线圈,可以通过在两个相互正交的方向上分别施加频率相同、相位相差90°的正弦磁场来实现平面内的旋转磁场。这样的实现方法对所使用的电源有一定的限制,即电源须为双极性电源。但是由于当电流在零点附近变化时,双极性电源的性能并不稳定,所以在线圈设计时采用双线绕制线圈,并对同一方向的两组线圈分别采用单极性直流电源进行驱动,避免了双极性电源的使用。旋转磁场的具体实现方式是当sinωt≥0时,在A组线圈中通入电流IA,此时A组线圈可产生kAIAsinωt的磁场,当sinωt<0时,在B组线圈中通入电流IB,此时B组线圈可产生kBIBsinωt的磁场;同理,当cosωt≥0和cosωt<0时,分别在C组和D组线圈中通入电流IC和ID,从而使C组线圈和D组线圈分别产生kCICcosωt和kDIDcosωt的磁场,其中k为线圈电流与所产生磁场的比例系数,与线圈的尺寸、结构等有关,ω为旋转磁场的角频率,当kAIA=kBIB=kCIC=kDID=K时,四组线圈产生的磁场叠加就可以得到旋转磁场:
B=BA+BB+BC+BD
(1)
因此可以按照上述的方式激励4组线圈并调节线圈电流使kAIA=kBIB=kCIC=kDID=K,这样就可以在线圈的中心区域产生旋转磁场,通过调节激励电流的相位可以实现磁场的正转和反转。
4 软件设计
本文基于MFC编写了该系统的控制软件,该软件包括磁场控制模块和图像实时显示模块两部分。磁场控制模块主要实现的功能是方向可调的磁场的生成、旋转磁场的生成以及通过操纵杆对磁场进行手动控制。图像的实时显示模块主要实现对显微镜所观察的目标进行实时的显示及跟踪,以便于实验的观察和磁场的调节。软件的具体流程图如图6所示。

图6 软件流程图Fig.6 Flow chart of system software
4.1 磁场控制模块
磁场控制模块中可以在用户界面中选择所要施加的磁场为恒定磁场或者旋转磁场,并且设定所要施加的磁场大小和方向,如果选择旋转磁场,还可设定旋转磁场的频率和输出时间间隔。由于本文的正弦磁场是将离散的正弦信号经过数据采集卡进行DA变换后控制恒流源输出得到的,所以输出的磁场波形为阶梯状,在频率一定的情况下,输出时间间隔越小,波形越平滑,但由于计算机响应时间也会较长,输出波形的频率稳定性变差。本文在实际应用中通常将输出点数设置为100。为了避免误操作而输入过大的磁场值,在软件中设置磁场输入范围0~10 mT,频率范围0~50Hz,输出时间间隔大于1ms。当输入数值超出阈值系统就会报警,提示输入错误,从而增加系统的可靠性。在系统运行过程中,会实时显示所输出的磁场的大小和方向。本系统中添加了对磁场的手动控制部分,通过推动操纵杆来改变磁场的大小和方向,提高系统操作的灵活性。
4.2 图像实时显示模块
为了更加方便地实现对趋磁细菌机器人的控制和实时观察,本系统中设计了显微图像显示模块。显微镜上安置有10X、20X和40X等倍数的镜头,可根据实际观察的物体合理选择镜头。连接在显微镜上的网络摄像机(型号海驰HCH5001)采集的视频为720p格式,分辨率为1280×720p/60Hz,FPS帧率为25帧/s,可以提供清晰、流畅的画面。网络摄像机将显微镜得到的光学信号转化为数字图像信号,并对其进行压缩、打包,以H.264格式通过网线传输给上位机。H.264是新一代的视频压缩标准,具有较高的压缩比和较好的网络适配性,但是与视频显示相关的windows API函数并不支持此格式,所以将传输到上位机的H.264视频进行解压缩,得到分辨率为1280×720的YUV420格式的图像,再将其转化为RGB图像进行显示。该软件的界面如图7所示。通过测试表明本软件运行稳定,满足趋磁细菌机器人的驱动控制和显示追踪的功能。
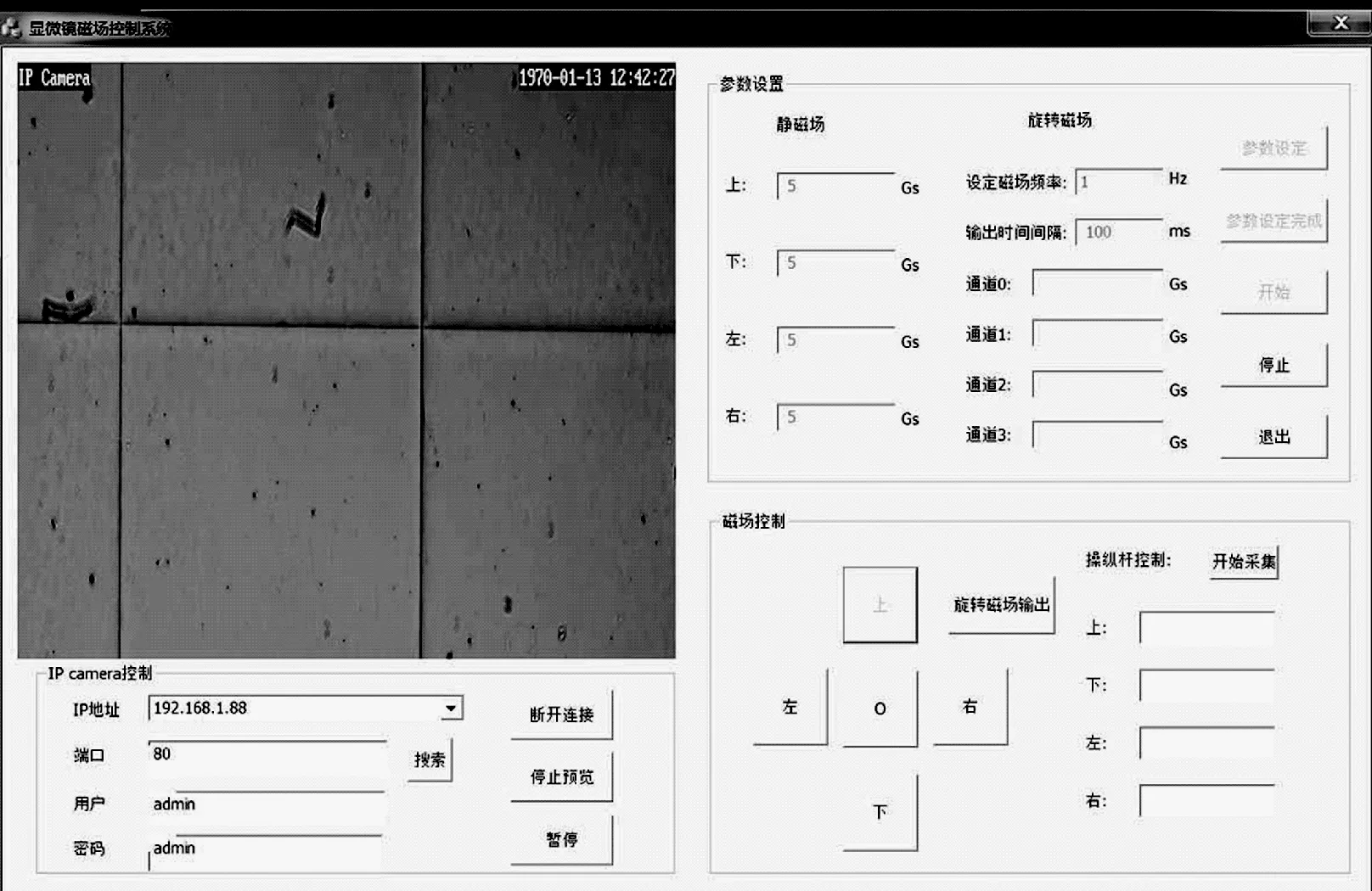
图7 控制系统软件界面Fig.7 Interface of control system software
5 实验
为了验证所搭建的磁场控制系统的可用性,选取趋磁细菌MO-1作为模型进行实验。首先将菌液进行适当稀释,吸取10μl稀释后的菌液滴在载玻片上,再用盖玻片覆盖。待液体平衡后在显微镜下观察,实验选取40X(40倍)目镜进行放大观察。
首先施加0.5mT向上的磁场,观察MO-1的位置变化,并通过网络摄像机抓拍到其运动的视频图像。为了更直观地观察MO-1位置的变化情况,将得到的连续5帧视频图像进行合并,如图8(a)所示。图中A处为固定参照物,从图中可以看出,在磁场的控制下MO-1的位置不断上移,运动方向如图中黑色虚线所示。
当改变磁场方向向右、保持磁场幅值不变时,由于惯性原因,MO-1向前继续运动一段距离,经过一段弧型的轨迹后,再沿与磁场一致的方向继续运动,其运动轨迹如图8(b)所示。同样,当改变磁场方向向下和向左时,趋磁细菌MO-1也沿相应的磁场方向运动,如图8(c)和图8(d)所示。
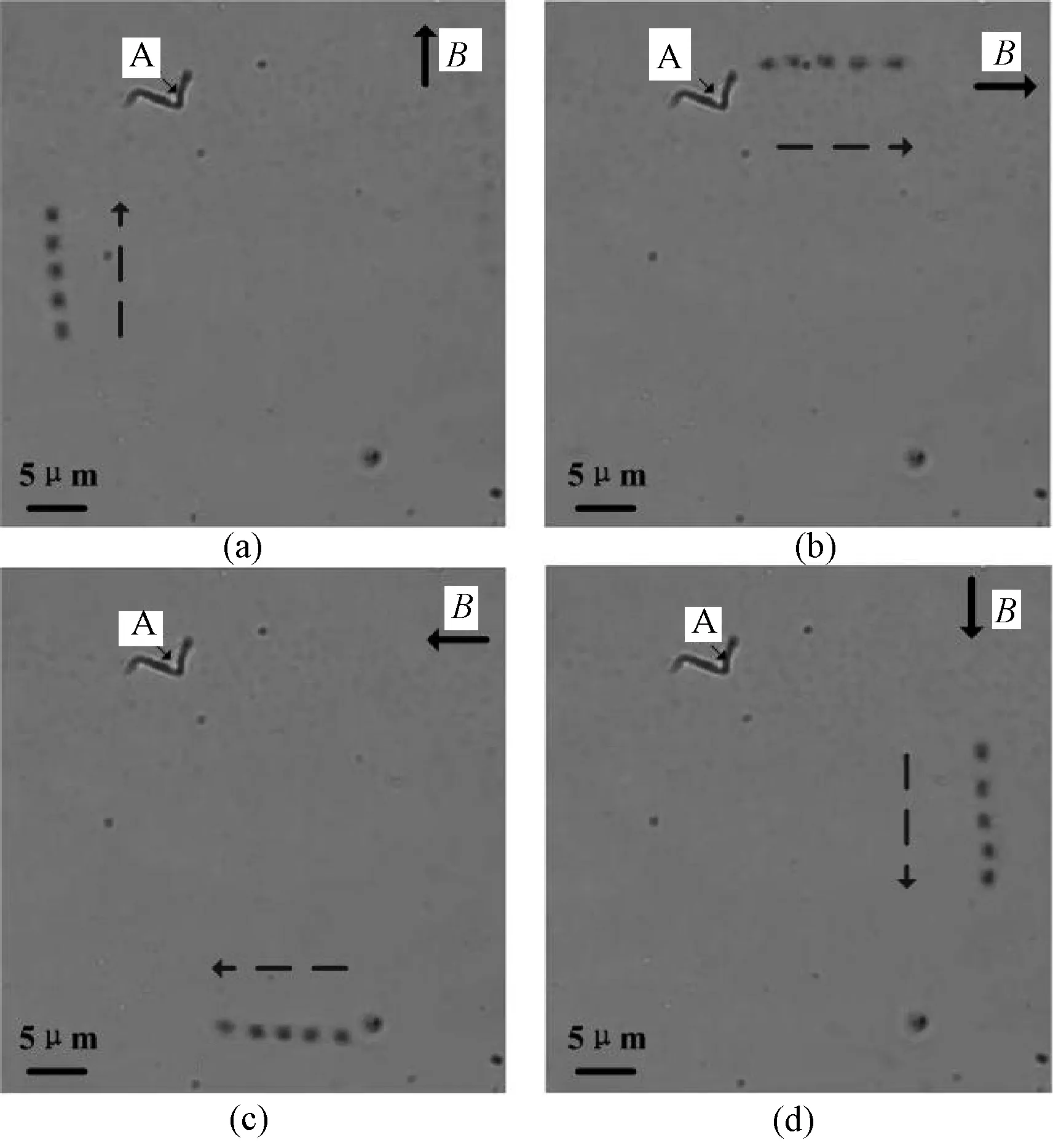
图8 MO-1在不同方向的磁场下运动Fig.8 Motion of MO-1 in magnetic fields in different directions
当施加幅值为0.5mT、频率为1Hz的旋转磁场时,通过网络摄像机抓拍到其运动的视频图像。在所得到的视频图像中每隔三帧选取一副图像进行合并。从而得到MO-1在旋转磁场下的运动轨迹,如图9所示, MO-1做顺时针的圆周运动,图中黑色虚线为MO-1的运动方向。MO-1有时并不在同一平面运动,由于显微镜物镜聚焦的调节相对MO-1的运动略有滞后,所以在一定程度上影响了MO-1图像的清晰度。
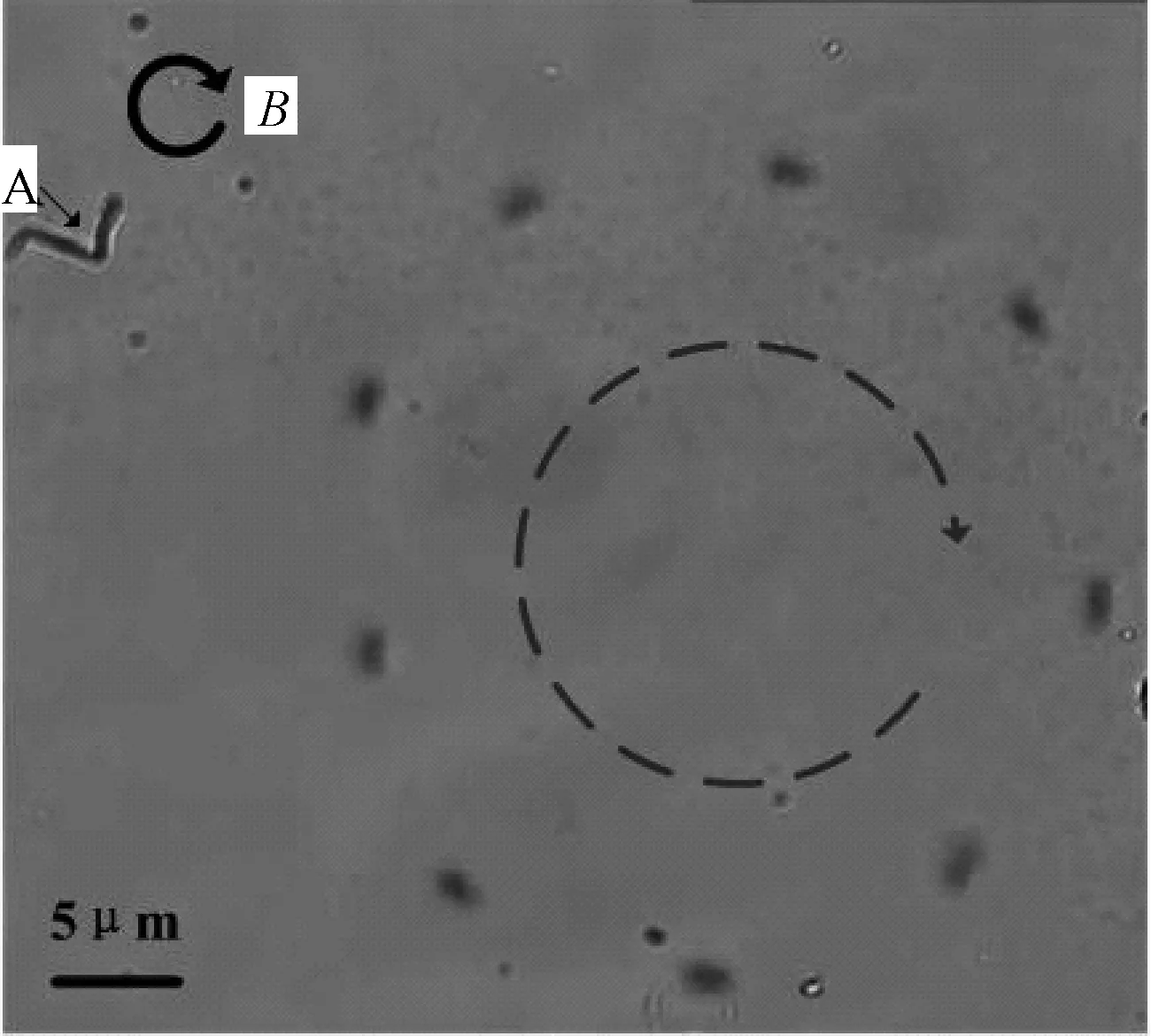
图9 MO-1在旋转磁场下做圆周运动Fig.9 Rotating motion of MO-1 in rotating magnetic field
实验表明,所设计搭建的磁场控制系统可有效
控制趋磁细菌MO-1的直线运动以及旋转运动,并能实现趋磁细菌的实时显示和跟踪。
6 结论
本文设计了一套用于趋磁细菌机器人的运动控制系统,本系统通过控制外磁场来实现对趋磁细菌的运动控制,通过BX53正置显微镜实现对目标运动的实时显示和追踪。本文根据BX53的结构特点设计了一套置于显微镜外围的驱动线圈装置,该线圈能产生0~1mT的静磁场和频率0~50Hz、幅值0~1mT的旋转磁场。本文还编写了一套利用磁场进行运动控制的软件,能够实现对观察目标运动的实时控制和显示,软件运行稳定,能够满足实验要求。本文设计的这套装置为以后趋磁细菌机器人的发展和应用奠定了坚实的基础,也可方便地推广应用到其他磁性微机器人的外磁场调控中。
[ 1] Richter M, Kube M, Bazylinski D A, et al. Comparative genome analysis of four magnetotactic bacteria reveals a complex set of group-specific genes implicated in magnetosome biomineralization and function [J]. Journal of Bacteriology, 2007, 189(13): 4899-4910.
[ 2] Solovev A A, Sanchez S, Pumera M, et al. Magnetic control of tubular catalytic microbots for the transport, assembly, and delivery of micro-objects [J]. Advanced Functional Materials, 2010, 20(15): 2430-2435.
[ 3] Grünberg K, Wawer C, Tebo B M, et al. A large gene cluster encoding several magnetosome proteins is conserved in different species of magnetotactic bacteria [J]. Applied and Environmental Microbiology, 2001, 67(10): 4573-4582.
[ 4] 许良 (Xu Liang). 微医疗机器人旋转磁场驱动电源的研究 (Research on field driving power of medical micro robot with rotating magnetic) [D]. 大连:大连理工大学 (Dalian: Dalian University of Technology), 2006. 12-13.
[ 5] Hayashi I, Iwatuki N. Micro moving robotics [A]. Proceedings of the 1998 International Symposium on Micromechatronics and Human Science [C]. Nagoya, Japan,1998. 41-50.
[ 6] Bazylinski D A, Frankel R B. Magnetosome formation in prokaryotes [J]. Nature Reviews Microbiology, 2004, 2(3): 217-230.
Design and fabrication of external magnetic field controlled system for magnetic micro-robots
WANG Xin1,2, WEI Shu-feng1, CHEN Chang-you1,2, XU Jian-sheng1, ZHANG Yu-xia1, SONG Tao1
(1. Beijing Key Laboratory of Biological Electromagnetism, Institute of Electrical Engineering, CAS, Beijing 100190, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
With the development of the micro-robots, the magnetic micro-robots are widely used with the advantages in energy supply. A control system combined with a microscope which is used to control the motion of the magnetic micro-robots is designed in this paper. The system mainly consists of a computer, a magnetic field control module and an image display module. The motion of the magnetic micro-robots is controlled by the magnetic field. The magnetic field in a 40mm×30mm region of coils center can reach 0~1mT and its frequency is 0~50Hz. By setting different parameter values we can make the static magnetic field and the rotating magnetic field to control the straight linear motion and the rotation motion of the magnetic micro-robots. We use the microscope BX53 to magnify the motion of the magnetic micro-robots, then we control the motion of them and realize the image real-time display. A set of control software to realize the functions above is written.
magnetic micro-robots; microscope BX53; motion control system; magnetic coils
2015-03-20
国家自然科学基金重点资助项目(51037006)
王 馨(1989-), 女, 黑龙江籍, 硕士研究生, 研究方向为生物电磁技术; 宋 涛(1968-), 男, 山东籍, 研究员, 博导, 研究方向为生物电工技术、 永磁技术及应用、 电磁检测技术(通信作者)。
TM153+.5
A
1003-3076(2016)02-0075-06
猜你喜欢
天天爱科学(2022年4期)2022-11-08
大电机技术(2022年4期)2022-08-30
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
装备制造技术(2020年12期)2020-05-22
小学科学(学生版)(2019年11期)2019-12-09
模具制造(2019年7期)2019-09-25
中学生数理化·高二版(2016年12期)2017-02-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08