
基于过街行人检测的路口自适应交通信号控制
2016-05-25 00:37张慧铭
重庆交通大学学报(自然科学版) 2016年5期
肖 梅,刘 锴,张 雷,张慧铭,王 杏
(1. 长安大学 汽车学院,陕西 西安 710064;2. 长安大学 公路学院,陕西 西安 710064)
基于过街行人检测的路口自适应交通信号控制
肖 梅1,刘 锴1,张 雷1,张慧铭1,王 杏2
(1. 长安大学 汽车学院,陕西 西安 710064;2. 长安大学 公路学院,陕西 西安 710064)
针对行人密度波动大的路口的交通信号配时优化问题,提出了以行人过街请求为主的交通信号配时,搭建了由视频采集、行人检测和信号配时构成的交通信号控制系统。视频采集单元采集行人的图像数据;行人检测算法是利用背景重构实时构建行人等候区的背景,继而以背景减法检测等候过街的行人;信号配时由等候过街的行人数和等候时长决定。对实际的交通路口进行仿真,结果表明:在行人低峰时段,行人和车辆平均延误分别为5.62 s/veh和15.99 s/ped,在略微增加行人延误基础上,车流的延误大大降低;在行人高峰时段,车辆平均延误为52.13 s/veh,行人平均延误降至8.35 s/ped,优先保证大密度人群顺利通过路口。
交通工程;交通控制;过街信号控制;背景重构;行人检测;视频图像处理
0 引 言
交通路口的信号配时优化是在不增加交通基础设施的基础上,提高交通参与者的安全和效率,是城市交通系统的研究热点。目前路口的信号配时设置主要以优化车流为主,行人主要利用机动车红灯的空隙穿越道路,这样容易导致行人的等候时间过长和等候延误。行人的延误过长会引起行人违章率上升,美国公路通行能力手册[1](highway capacity manual,HCM)建议,当行人的延误小于10 s时,能较好地遵守交通规则;但当行人的延误大于30 s时,行人的交通违章率会增加。过高的行人违章率会严重影响车流的运行效率和交通安全[2]。发达国家(如美国等)开始关注于行人和自行车交通,根据2009年美国居民出行调查(national household travel survey,NHTS)统计,非机动车交通比例上升至425亿美元[3],随着行人和自行车交通比例的上升,增加了非机动车交通的基础设施建设[4]。可见,优化行人的交通信号、减少行人的交通延误,对于提高城市交通控制系统的安全和运行效率来说尤为重要。
目前,路口的信号配时设置主要以提高车辆的安全、运行效率和减少车辆的延误为主,主要包括:定时控制[5-6]和实时控制[7-8]。A.KOUVELAS等[5]将韦伯斯特程序用于定时信号控制,在不饱和的交通条件下,定时信号配时有显著的效果。J.D.SCHMÖCKER等[6]以机动车流在交叉口的平均延误、平均排队长度及过街行人在交叉口的等候时间为优化目标,建立了交通信号控制参数的多目标优化模型,并基于Bellman-Zadeh模糊逻辑,将多个目标之间的冲突和支配关系转化为单个目标优化问题。为缓解混合交通条件下的交通拥堵,CHEN Xiaohong等[7]考虑车辆和非机动车的协调,以车流和非机动车数量为输入,旅行者延误、停车次数和交通容量为优化目标,饱和度为约束条件,依据混合交通的组成自适应地调整指标的权重,并通过遗传算法求解多目标模型。该模型可以较好地权衡不同主体的信号配时,缓解混合交通条件下的交通拥堵。KUANG Xianyan等[8]提出了一种基于专家知识的交叉口交通信号控制模型。该信号控制利用交叉口的交通检测器的检测信息,决定延长或终止当前的绿灯信号,并调整最佳的信号相位长度来适应交通环境。这些信号控制系统均以车流的信号为主,几乎忽略行人的等待延误。
尽管行人的过街安全受到了极大的关注,但是以行人为主的信号控制系统方面的文献并不多见。为提高行人过街的安全性并及时响应行人过街请求,行人触动式过街系统被广泛应用在美国诸多路口。行人过街时,按下过街请求按钮,信号灯会给出一个固定的行人通行信号。行人触动式过街系统可以减少58%的行人碰撞,能提高行人的过街安全性[9]。但是由于行人未注意到按钮、按键损坏和系统未及时反应等原因,行人触动式过街系统使用率还不到50%[10]。由于触动式过街系统的使用率不高,一些新的基于红外线、微波、视频和雷达等传感器的自动行人检测装置被应用于行人信号系统中[11],自动检测装置可跟据行人的实际行走速度调整行人信号配时、触发行人信号和路灯等功能,提高行人配时的有效性和可靠性。由于各传感器的工作原理不同,其应用范围也不同,如表1。
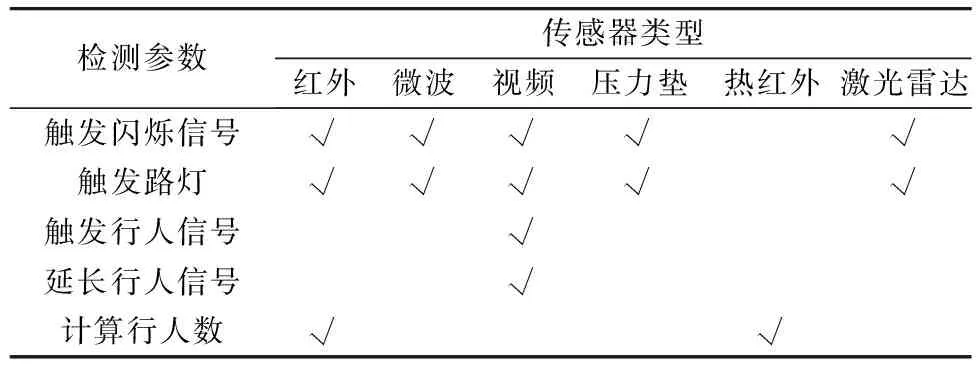
表1 自动行人检测器的应用
K.LOVEJOY等[12]利用视频检测器自动检测人行横道上的行人,在不改变信号配时的前提下,据此调整行人的清空时间,可以减少行人和车辆的交通冲突、提高行人交通安全,并探讨如何优化信号配时。LU Xiaozhao等[13]基于行人自动检测装置开发了模糊逻辑控制器配置动态的行人配时,该系统可以提高行人的安全性。为减少行人交通延误,T.PETRITSCH等[14]提出了行人服务水平(level of service, LOS)模型。路口的行人延误定义为周期长和有效绿灯时间的函数,但考虑到行人相位的容许时长和信号控制器运行模式等因素时,定义的行人延误显然和实际的复杂情况相距甚远,这样计算的行人延误有较大误差。S.KOTHURI等[15]提出并测试了减少行人延误的方法,选择在波特兰和俄勒冈的一个半行人信号(仅有一半路口设置有行人信号)和全行人信号(全部路口均有行人信号)路口,测试改变信号配时等参数时行人的延误。结果表明:在低峰时段不设置多路口信号联动和增加保护相位时长都会减少行人延误,但未涉及利用信号配时来减少行人延误。以行人过街请求信号为主,基于规则的行人信号控制系统[16],以行人自动检测技术检测行人的出现、等候时间和行人数,设计了相位结构、相位转换规则和控制逻辑等。在假定检测器进度100%时,利用Vissim仿真验证了系统的有效性。但是该系统还只是处于仿真阶段,未涉及行人自动检测技术的具体实施。
由表1可以看出,由于视频检测丰富的色彩和时间特性,被广泛应用在交通控制中,但是之前的应用却无法计算行人数。笔者调整视频采集器的安装位置,可以实现触发闪烁信号、路灯和行人信号,计算行人数,并调整行人信号配时等功能。在由车流和人流组成,且人流密度波动大、无规律的交通路口,笔者基于行人视频自动检测技术检测行人、行人数及等候时长等信息,设计了一套基于过街行人检测的城市道路交通信号控制系统,旨在及时响应行人的过街信号,并减少行人过街对主干道车流的干扰。系统通过视频图像采集单元采集等候过街的行人的图像数据,利用背景减法检测过街行人,依据过街行人数和等候时长进行交通信号配时,并进行了交通仿真与分析。
1 基于行人的交通信号控制系统
基于过街行人检测的城市道路交通信号控制系统。包括视频采集、行人检测和信号配时3个组成单元。视频采集单元安装在过街斑马线两侧行人等候区的上方,在行人通行信号状态下,采样的视频图像信号用于场景的背景重构或更新,在行人阻行信号状态下,采样的视频图像信号用于检测等候过街的行人;行人检测单元依据背景重构实时构建行人等候区的背景,继而以背景减法检测等候过街的行人;信号配时单元依据等候过街的行人配置行人过街的绿灯信号。系统依据过街行人来配置行人绿灯时长,这样可以减少固定配时对主干道车辆造成的不必要等候,且能及时响应行人过街请求,体现“以人为本”的交通信号控制。
1.1 行人视频采集
系统以响应行人过街请求为主,因而对行人视频采集主要是针对行人等候过街的区域。通常,行人多在斑马线附近等候过街,因此,行人视频采集主要针对斑马线附近的等候过街区。行人等候区为一虚拟的矩形区域,实际中,可在斑马线两端设置矩形的行人等候区,并标以“过街行人等候区”字样。行人检测只针对行人等候区进行处理,用r和c表示等候区的行数和列数。
1.2 行人检测算法
运动目标检测算法主要有光流法、帧差法和背景重构法等3种。光流分析法能够探测独立运动的对象,不需要预先知道场景的任何信息,可用于摄像机运动的情况,但光流法对光线和噪声的变化特别敏感且计算复杂、耗时;帧差法分离出来的运动目标会出现“空洞”和“拉伸”, 当时间间隔选择不适当时容易出现检测不到物体的情况,不利于进一步的分析与识别;基于背景减法的行人检测方法简单,一旦背景构建好之后,能实时地检测行人,且提取的行人完整。故采用基于背景减法的行人检测方法。行人检测算法包括行人等候区的背景重构、背景更新和行人检测。在行人通行时进行背景的重构和更新,在行人阻行时执行行人检测算法。
1.2.1 行人等候区的背景重构
行人等候区设置在斑马线附近,通常为一致的道路颜色,但是由于行人等候区存在暂停的车辆/行人、乱扔的杂物、噪声和驶过的洒水车等等因素的干扰,增加了处理的难度。此外,为满足系统的存储空间少、实时性要求高的特点,采取笔者提出的在线聚类背景重构算法[17]。每个像素最多用两幅背景表征,用ft(p)表示像素p在第t帧的灰度值,N为聚类数,Ck(p)表示像素p第k个类的中心,mk(p)表示像素p的第k个类的数据数,以像素p为例说明算法步骤。
步骤1:建立初类。初类的中心、初类的数据数分别如计算式(1)和式(2):
Ck(p)=ft(p)
(1)
mk(p)=1
(2)
式中:Ck(p)和mk(p)分别为k类的中心和数据数,形成的总聚类数N=1,此时t=1。
步骤2:输入新数据ft(p),采用欧式距离计算ft(p)和已形成的所有类间的距离。
步骤3:寻找与ft(p)距离最近的类。如形成的N类中存在类k满足计算式(3),则类k即为与ft(p)距离最近的类:
(3)
(4)
mN(p)=mN(p)+1
(5)
CN(p)=ft(p)
(6)
mN(p)=1
(7)
步骤5:计算所有灰度类的频率。第k类的频率Wk(p)计算为式(8)所示:
(8)
步骤6:背景选择。对像素p的背景选择策略如下:
1.2.2 行人等候区的背景更新
实际场景中由于前景运动的短暂静止、光线突变等原因,背景常常会发生变化,故背景图像应当能自适应更新。背景更新的方法通常有定时更新和条件更新两种。定时更新即在规定时间段中(5~10min),抽取最后10~20s图像序列,对场景进行背景重构;条件更新策略通常是设定一定的条件,一旦场景变化满足条件则进行背景重构。
文中算法采取条件更新策略,条件更新满足以下条件:① 若在行人通行信号状态下,连续多帧与背景参考帧差分后所得差分图像中,发生变化的像素数与全部像素数的百分比大于某一个阈值(通常取80%),则背景发生了变化,对场景的背景用本文的背景重构算法进行重构;② 若在行人通行信号状态下,某一固定区域连续被检测为运动目标,且该固定区域在连续多帧像素灰度值平稳,则该固定区域的背景发生了变化,认为前景静止了较长时间,直接将该区域连续多帧的灰度均值作为该区域的次优背景值。
1.2.3 行人等候区内的行人检测
在行人阻行时,行人检测采用直接背景差分法,行人检测的采样时间选定为0.5~1s为合适。行人检测表示为:
Mt(x,y)=
(9)
式中:bi(p)为像素p的第i个背景灰度值;ft(p)为像素p在第t帧的灰度值,笔者图像帧的采样间隔为1s;δ为设定的门限值,取和背景重构相同的阈值;Mt(p)=1表示像素p为行人,Mt(p)=0表示像素p为背景。
1.2.4 等候过街的行人数和等候时长
用pdt为提取的第t帧时的行人等候帧,则像素p的等候时长Dt(p)计算如式(10):
Dt(p)=
(10)
式中:Dt(p)=0表示像素p为背景;Dt(p)=a表示像素p为行人,且等待时长为as,a为整数。在系统初始化阶段,令t=0,等候行人数为Dt(p)=0。
为准确地提取等候的行人数和行人的等候时长,首先需要对pdt进行去零星操作。第t帧时等候的行人像素数Nt为Dt(p)中满足Dt(p)>0的所有像素数之和,用计算式表示如式(11):
(11)
式中:#为像素的数量;Nt为第t帧等候的行人的像素数。
第t帧行人的最长候时Qt(p)为Dt(p)中像素的最大值,用计算式表示如下:
(12)
1.3 信号配时
平面交叉路口中“以人为本”的信号配时方案为:在行人阻行时,检测等候过街的行人和最长候时,当行人检测单元未检测到有过街行人时,保持主干道车流的通行信号;一旦检测到有等候过街行人,且行人的最长候时大于一定值时(通常取5~10s),则认为有行人等候过街,开启行人通行信号,主干道车流黄闪时间为3s,行人绿灯开启时长为Gps。根据美国交通信号配时手册[19],主干道车流的最短的绿灯时间设置为10~15s,本信号系统设置车流的最短的绿灯时间为15s。
行人通行绿灯时长Gp计算如式(13):
Gp=
(13)
式中:L为人行横道长度,m;Sp为平均的行人行走速度,通常取1.2 m/s;Nped为过街行人数;WE为人行横道的宽度,m。
当取L=18 m,Sp=1.2 m/s,WE=3.5 m时,由计算式(13)得出行人通行绿灯时长Gp与过街人数的关系如图1。由图1可知,随着过街人数的增加,行人的通行的绿灯信号时长也会线性增加,当过街行人数为1人时,行人绿灯时长Gp为19 s,当过街人数增加至35人时,行人绿灯时长Gp为46.8 s。笔者通过视频设备检测过街的行人数,自适应地调节行人过街的信号时长。
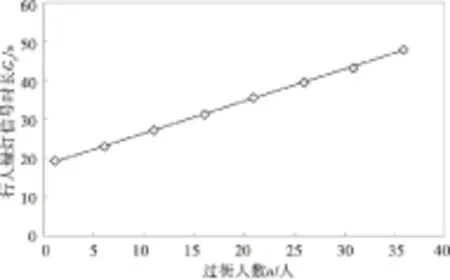
图1 过街行人数与行人信号时长Fig.1 The number of people crossing the street and pedestrian signal duration
过街行人数Nped计算如式(14):
(14)
式中:Lp和Wp分别为等候区的长和宽;Pp为行人的站立空间,常取Pp=0.6 m2;Nh为行人等候区的像素数;Nt为等候区的总的像素数目。
需要说明的是,对于视频的背景重构、行人检测和行人等候时长等处理均是针对行人等候区。
2 仿真实验与分析
仿真实验针对无信号控制的T字路口进行展开,该路口人行横道宽度为WE=5 m,长度为L=18 m,南北向为直行车辆,东西向为过街的学生。为验证实验的有效性,分别进行了行人检测和通行能力的仿真实验。
2.1 基于背景减的行人检测实验
为了验证文中算法的有效性,对实拍的行人过街的视频进行仿真实验,视频采样间隔为1帧/s。对视频图像进行处理提取等候的行人是关键,影响着系统工作的稳定性和适用性,选择部分视频处理的仿真结果显示于图2~图3。
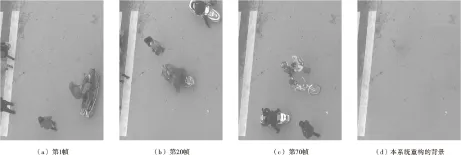
图2 行人通行时的背景重构结果Fig.2 Background restructuring when the traffic light is green for pedestrian crossing
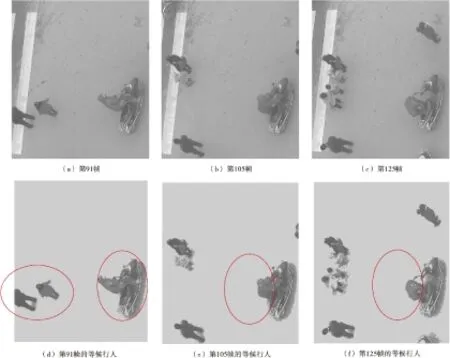
图3 行人阻行时的行人检测结果Fig.3 Waiting pedestrian detection when the traffic light is red for pedestrian
图2为行人通行时间段内对场景的背景重构结果。图2(a)~(c)分别是在行人通行时对视频图像的采样,在采样阶段仍有行人进入和离开。图2(d)为文中背景重构算法构建的背景,由图2(d)可见,算法构建的背景是有效的,当然,背景重构效果的好坏直接影响着行人检测的效果。图3为行人阻行时间段内对行人的检测结果。图3(a)~(c)为第91帧、第105帧和第125帧的采样图像帧,图3(d)~(f)分别为第91帧、第105帧和第125帧的行人检测结果,检测的行人的最长候时分别为1,15,35 s。图3中椭圆标注了最长的等候行人的区域块。
2.2 通行能力
在对西安市南郊某路口的实际交通状况进行验证。一所学校设置在主干道的东侧,主干道为双向四车道,单车道宽3.5m,南北主要为流量较大的车流,限速为60 km/h,东西为上下学的学生流。由于人流的高峰主要集中在学生上、下课的时段,固定的信号配时和主干道车流感应的信号控制均不适合该路口,故目前该路口并未设置交通信号灯。
对该路口的实际交通数据进行实地观测,调研数据为:车流高峰有早、中和晚3个高峰时段,高峰时段分别为07:00—9:00, 11:30—13:30和16:00—18:00,其高峰时段单向双车道车流平均为3 000,2 200,3 000辆/h,低峰时段为1 500辆/h。行人高峰时段分别为07:30—08:10, 11:30—12:10, 13:50—14:20和16:10—16:50,高峰时段和低峰时段人流密度大约为2 000人/h和300人/h。将调研的交通数据在Vissim微观仿真软件中进行仿真,仿真时间从07:00—18:00,仿真结果分别与无信号灯和固定配时信号控制作比较。
无信号灯、固定配时信号控制和本系统信号配时方案为:本系统的信号配时参数选择为:行人检测采样时间为1 s,L=18 m,Sp=1.2 m/s,WE=3.5 m,Pp=0.6 m2,Lp=4 m,Wp=5 m,Nt=r·c=97 200,通过计算可得:19 s≤Gp≤45 s,故本系统信号配时在19 s和45 s之间变动;无信号配时方案严格遵循车让人的交通规则;固定信号配时方案采用两段式配时,具体为:周期长为120 s,人流高峰时段取行人的绿灯时长为45 s,人流低峰时段行人的绿灯时长为19 s,黄闪3 s。仿真结果分别如表2和表3。
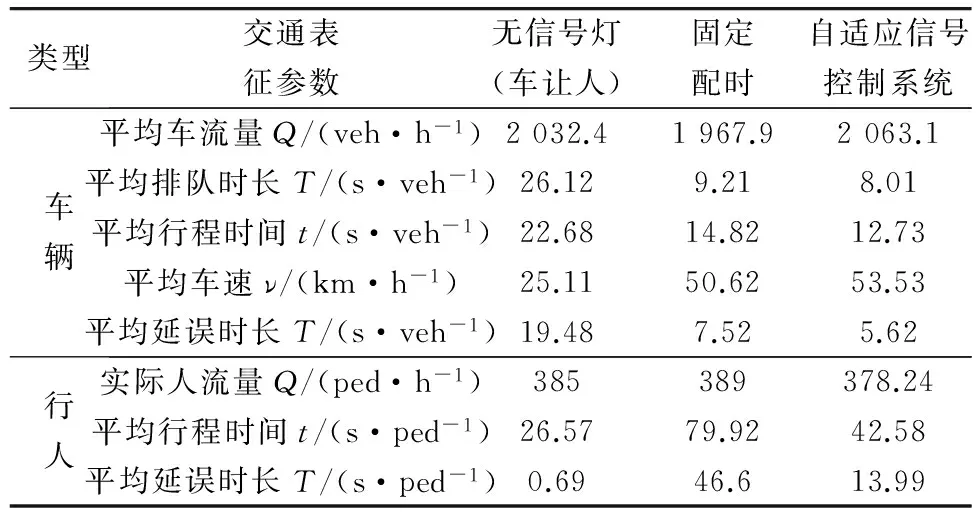
表2 行人低峰时段的仿真结果
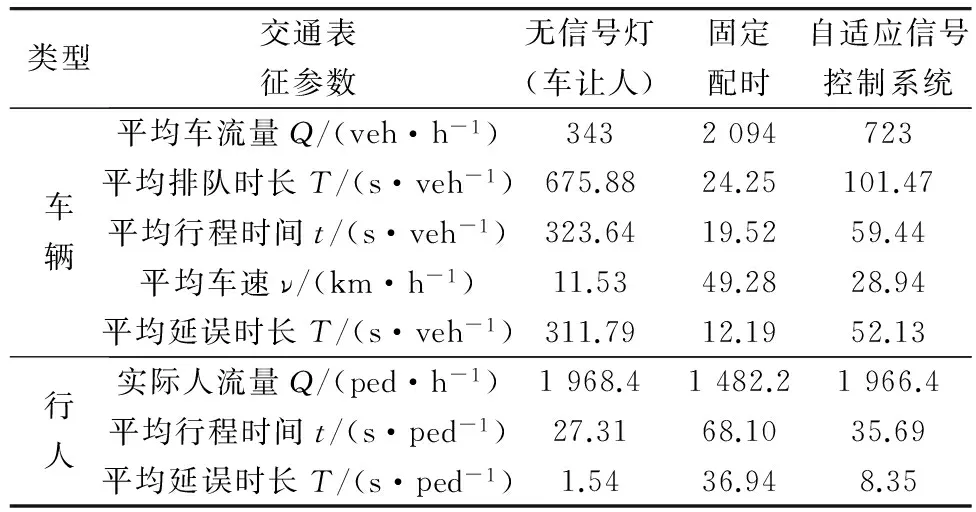
表3 行人高峰时段的仿真结果
表2为人流量为低峰时的仿真结果。当路口人流量较低时,无信号灯(车让人)的信号配时的行人平均延误很少为0.69 s,尽管对车流量影响不大,但是车流的车速下降了近50%,平均延误为19.48 s,平均排队时长为26.12 s;固定信号配时以车流需求为主,车辆的平均延误低,为7.52 s,平均行驶车速为50.62 km/h,却易引起行人的平均延误上升,为46.6 s,过高的行人延误将导致高的行人违章率,容易诱发交通事故;和固定配时相比,提出的自适应信号控制系统,车辆的平均延误减少1.85 s/veh,车辆行驶速度略有提高,行人的平均延误减少至13.99 s,可见自适应的控制系统能减少车流和行人延误。
表3为人流量高峰时的仿真结果。当路口人流量为高峰时,即为学生的上下课高峰时段,此时需要保证行人顺利地通过路口,避免大量行人的聚集。无信号灯(车让人)配时方案主要以行人过街为主,能确保行人在最低的延误下顺畅通过路口,可是对车流的影响极大,实际通过车流量下降为343 veh/h,车辆平均排队时长和平均延误分别为675.88 s/veh和311.79 s/veh;固定配时信号控制方案未考虑路口行人为学生的特殊性,在保证车流通畅的前提下,对行人造成了较大延误,行人平均延误36.94 s/ped,实际通过的行人量为1482.2 ped/h,容易造成行人的聚集;而本文提出的自适应信号控制系统,行人平均延误低,为8.35 s/ped,低的行人延误对车流也有一定的影响,车流平均排队时长为101.47 s/veh,车辆平均延误为52.13 s/veh,保证行人顺利通过路口。可见,本文提出的信号控制系统,在人流高峰时段时,以行人通行信号为主,在适当延长行人的行程时间和延误时,能大大改善主干道车辆的拥堵。
需要说明的是,现阶段对本系统开展实用前的仿真试验,一方面试验所用视频是人工用摄像机从近旁建筑物上采集得到,故可见试验视频帧有轻微倾斜;另一方面由于实际道路上并未严格标示“行人等候区”等字样。一旦本系统真正投入实用,采用专门安装于路侧的摄像头采集图像,且减少了其它前景的干扰,系统将能取得更理想的实验结果。
3 结 语
经过仿真试验,该系统在以下方面取得了进展:① 搭建了系统的结构框架,仿真实验验证系统的结构是合理的、可行的;② 在线聚类算法可以满足较好地构建场景的背景;③ 采用数字图像的处理方法,能准确检测等候的行人数及行人的等待时间。
笔者并未考虑行人的过街特性,过街行人的数量、年龄等因素对行人的行走速度对自适应配时有影响,笔者将进一步研究“批与群”的过街特性对信号配时的影响。为使系统在实际中能真正实用,彩色图像的背景重构算法和对典型路口进行全天候的实验和基于过街人数的行人绿灯信号的合理设置也是下一步的研究重点。
[1] Transportation Research Board.HighwayCapacityManual[M]. USA: Transportation Research Board,2010.
[2] WANG Wuhong, GUO Hongwei, GAO Ziyou, et al. Individual differences of pedestrian behaviour in midblock crosswalk and intersection[J].InternationalJournalofCrashworthiness,2011,16(1):1-9.
[3] Federal Highway Administration.NationalHouseholdTravelSurvey[M]. USA: Federal Highway Administration,2009.
[4] Federal Highway Administration.UnitedStatesDepartmentofTransportationPolicyStatementonBicycleandPedestrianAccommodationRegulationsandRecommendations[R]. USA: Federal Highway Administration,2010.
[5] KOUVELAS A, ABOUDOLAS K, PAPAGEORGIOU M, et al. A hybrid strategy for real-time traffic signal control of urban road networks[J].IEEETransactionsonIntelligentTransportationSystems,2011,12(3):884-894.
[6] SCHMÖCKER J D, AHUJA S, BELL M G H. Multi-objective signal control of urban junctions-framework and a London case study[J].TransportationResearchPartC:EmergingTechnologies,2008,16(4):454-470.
[7] CHEN Xiaohong, QIAN Dalin, SHI Donghua. Multi-objective optimization method of signal timing for the non-motorized transport at intersection[J].JournalofTransportationSystemsEngineeringandInformationTechnology,2011,11(2):106-111.
[8] KUANG Xianyan, XU Lunhui. Real-time traffic signal intelligent control with transit-priority[J].JournalofSoftware,2012,7(8):1738-1743.
[9] FITZPATRICK K, PARK E S. Safety effectiveness of HAWK pedestrian treatment[J].TransportationResearchRecord:JournaloftheTransportationResearchBoard,2009,2140:214-223.
[10] HUGHES R, HUANG H, ZEGEER C, et al. Automated detection of pedestrians in conjunction with standard pedestrian push buttons at signalized intersections[J].JournaloftheTransportationResearchBoard,2001,1705:32-39.
[11] MARKOWITZ F, MONTUFAR J. Recent developments in automated pedestrian detection[C]//ManagingOperationalPerformanceExceedingExpectations, 2012ITETechnicalConferenceandExhibit. Washington, D.C.: Institute of Transportation Engineers,2011.
[12] LOVEJOY K, MARKOWITZ F, MONTUFAR J. Use of video for automated pedestrian detection and signal-timing extension: results from a pilot installation in San Francisco, California[C]//TransportationResearchBoard91stAnnualMeteting. Washington, D.C.: Transportation Research Board,2012.
[13] LU Xiaozhao, NOYCE D A. Pedestrian crosswalks at midblock locations: fuzzy logic solution to existing signal operations[J].JournaloftheTransportationResearchBoard,2009,2140(1):63-78.
[14] PETRITSCH T, LANDIS B, MCLEOD P, et al. Pedestrians: level-of-service model for pedestrians at signalized intersections[J].JournaloftheTransportationResearchBoard,2005,1939(1):55-62.
[15] KOTHURI S, REYNOLDS T, MONSERE C, et al. Testing strategies to reduce pedestrian delay at signalized intersections: a pilot study in Portland, Oregon[C]//TransportationResearchBoard92ndAnnualMeeting. Washington, D.C.: Transportation Research Board,2013.
[16] NI Ying, DENG Tengyun, LI Keping. Pedestrian accommodation in intersection signal system: rule-based dynamic pedestrian control strategy[C]//TransportaionResearchBoard93rdAnnualMeeting. Washington, D.C.: Transportation Research Board,2013.
[17] 肖梅,韩崇昭.基于在线聚类的背景减法[J].模式识别与人工智能,2007,20(1):35-41. XIAO Mei, HAN Chongzhao. Background subtraction algorithm based on online clustering[J].PatternRecognitionandArtificialIntelligence,2007,20(1):35-41.
[18] STAUFFER C, GRIMSON W E L. Adaptive background mixture models for real-time tracking[C]//ProceedingsoftheIEEEComputerSocietyConferenceonComputerVisionandPatternRecognition. Los Angeles, CA, USA : IEEE,1999:246-252.
[19] PETER K, LEE R, KEVIN L, et al.TrafficSignalTimingManual[R]. McLean, VA, USA: Department of Transportation Federal Highway Administration,2008.
Adaptive Traffic Signal Control on Urban Intersection by Waiting-to-cross Pedestrian Detection
XIAO Mei1,LIU Kai1,ZHANG Lei1,ZHANG Huiming1,WANG Xing2
(1. School of Automobile, Chang’an University, Xi’an 710064, Shaanxi, P.R.China; 2. School of Highway, Chang’an University, Xi’an 710064, Shaanxi,P.R. China)
To optimize the time distribution from traffic signal at urban intersections with unstable crowd density, an adaptive traffic signal control system based on pedestrian request was developed. This adaptive signal control system consisted of image sequence capture by video, pedestrians’ detection and signal phase transition modules. Image sequence was captured by sequence capture unit. In pedestrians’ detection algorithm, a background reconstruction technology was applied to build background of scene, and then the waiting pedestrians were acquired in real-time through background subtraction. The pedestrians’ green phase was determined based on the number and associated waiting time of pedestrians in the waiting area. The effectiveness of algorithms was tested in a real road intersection. The mean delay of pedestrian and vehicle are 5.62 s/veh and 15.99 s/ped in low pedestrians peak. While the pedestrians are in high peak, the mean delay of vehicle is 52.13 s/veh and the mean delay of pedestrian is 8.35 s/ped.
traffic engineering; traffic control;crossing signal control;background reconstruction;pedestrians detection;video image processing
10.3969/j.issn.1674-0696.2016.05.24
2015-07-07;
2015-10-22
国家自然科学基金项目(61004087);陕西省国际交流合作项目(2015KW-009)
肖 梅(1977—),女,江西安福人,教授,博士,主要从事视频图像处理方面的研究。E-mail:27294664@qq.com。
U491.7;TN 919.8
A
1674-0696(2016)05-120-07
猜你喜欢
工会博览(2022年33期)2023-01-12
英语文摘(2022年12期)2022-12-30
南方文学(2020年2期)2020-09-01
数学小灵通(1-2年级)(2020年4期)2020-06-24
数学大王·趣味逻辑(2019年10期)2019-11-06
扬子江(2019年3期)2019-05-24
黑龙江交通科技(2017年8期)2017-03-03
浙江大学学报(工学版)(2016年9期)2016-06-05
数学教学通讯·初中版(2015年5期)2015-06-17
传奇故事(破茧成蝶)(2015年8期)2015-02-28
