基于动态滑模算法的AMT选换挡电机控制
2016-06-04 08:15孔国玲
中国机械工程 2016年10期
关键词:电动机
何 雄 张 农 孔国玲
1.湖南大学汽车车身先进设计制造国家重点实验室,长沙,4100822.清华大学,北京,100084
基于动态滑模算法的AMT选换挡电机控制
何雄1张农1孔国玲2
1.湖南大学汽车车身先进设计制造国家重点实验室,长沙,4100822.清华大学,北京,100084
摘要:针对电动机械式自动变速器换挡时间较长的特点,对电动AMT选换挡电机进行分析和建模;基于动态滑模理论,提出了一种换挡电机动态滑模控制方法,并将它应用于电动AMT汽车选换挡执行机构的位置跟踪控制。仿真与试验结果都表明,与常规的PID控制器和滑模控制器相比,动态滑模控制器响应速度快、鲁棒性好、跟踪精度高,能有效地改善AMT的换挡品质。
关键词:电动机械式自动变速器;动态滑模控制;选换挡;电动机
0引言
机械式自动变速器(automatic manual transmission,AMT)系统按照控制结构的不同可分为三种:电控液动、电控气动和电控电动[1]。其中,电控电动AMT因为结构简单、相对容易控制、易维护和成本低等优势,逐渐成为业内主流[2]。
电动AMT采用两个直流电机分别控制选换挡杆,实现选挡和换挡操作。选换挡系统的控制是电动AMT换挡控制中的重点和难点,其控制效果对换挡时间有较大影响,同时也影响AMT的换挡舒适性。因此,如何采用有效的控制算法实现电动AMT选换挡过程的精确控制,成为学者们研究的热点之一。任玉平等[3]采用模糊控制的方法,建立了选换挡电机控制的模糊规则;申业等[4]对电动AMT的换挡执行机构进行了建模,并设计了滑模控制器对电动AMT的换挡过程进行精确跟踪控制;高智等[5]基于最优控制理论,对电动AMT选换挡过程进行了仿真研究和试验验证。
动态滑模控制(dynamical sliding mode control,DSMC)算法兼具响应速度快、抗外界干扰能力强和鲁棒性好的优点,且能有效抑制常规滑模控制器的抖振现象[6-7]。本文建立了电动AMT选换挡系统模型,在此基础上设计了该系统的动态滑模控制器,并对其换挡过程进行了仿真研究和试验验证。
1电动AMT选换挡控制系统
电动AMT选换挡系统主要包括自动变速器控制器(TCU)、选挡电机和换挡电机、减速机构、选换挡执行机构和角位移传感器,电动AMT及其选换挡执行机构如图1所示。

图1 AMT及其选换挡执行机构示意图
执行机构的扭矩从两个额定电压为12 V的永磁直流有刷电机输出,经过减速机构减速增扭,将扭矩传递到换挡拨叉上,从而控制同步器分离或同步,实现选换挡操纵。整套执行机构受自动变速器控制器控制,选换挡电机的位置通过安装在选换挡电机输出轴上的角位移传感器反馈给控制器,实现闭环控制。
2电动AMT选换挡执行机构建模
AMT换挡可以分为离合器分离、摘挡、选挡、换挡、离合器接合五个过程。AMT换挡过程具有严格的时序要求,即必须实现前一过程的执行机构位置控制后,下一过程的执行机构才能开始动作。换挡电机和选挡电机并不同时工作,因此,可以将电动AMT选换挡系统的控制问题解耦成两个电机的单独控制问题。
永磁直流有刷电机的结构原理如图2所示。
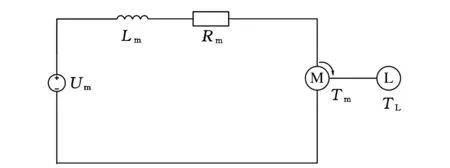
图2 永磁直流有刷电机原理
根据牛顿第二定律和基尔霍夫定律,电机的转矩平衡方程和电压平衡方程分别为
(1)
(2)
式中,θ为电机角位移;Tm为电机输出转矩;kt为转矩常数;im为电机电枢电流;TL为电机负载转矩;Jm为电机转动惯量;bm为电机阻尼;Um为电机电枢电压;Lm、Rm分别为电枢回路总电感和总电阻;kb为反电动势系数。
考虑减速机构传动效率的影响,对于选换挡电机,其负载可表示为[8]
(3)
式中,FL为选档力或换挡力;r为换挡力或选挡力的作用半径;i为减速比;η为减速机构的机械效率。
联立式(1)和式(2)可得
(4)
定义直流电机系统的状态变量为
(5)
根据式(4)和式(5),可以列出直流电机的状态方程:
f(x)+Bu+h(x,t)
(6)
式中,h(x,t)为外界的不确定干扰。
3动态滑模控制器的设计
选换挡系统在不同车速和不同挡位下所需的换挡力不同,将造成选换挡系统建模的不精确,实现电动AMT汽车选换挡电机执行机构位置的实时、精确控制是比较困难的。为了使选换挡系统对外部扰动具有较强的鲁棒性,解决抗干扰性能与位置快速跟踪控制的矛盾,本文采用动态滑模控制器实现对电动AMT选换挡电机的有效控制。
对于永磁直流有刷电机,定义系统的位置追踪误差矢量为
(7)
式中,Xd为电机的角位移设定值。
对于三阶非线性系统,其常规滑模面S可定义为
S=c1e1+c2e2+e3
(8)
式中,c1、c2为切换面的常系数,且满足多项式p2+c2p+c1为Hurwitz稳定;p为拉普拉斯算子。
以常规滑模控制器的切换面s为基础构建动态滑模控制器的动态滑模面σ:

(9)
式中,λ为正实数。
对动态滑模面求导可得
(10)

f(x)-cu+h(x,t))+(c1+λc2)e3+λc1e2]
(11)
为了保证滑模面的到达条件成立,采用指数趋近率,则其趋近控制规律为
(12)
式中,k、ε均为正实数。
事实上,父母的信念为儿童关于科学、宗教和超自然现象的认知发展提供了重要的背景(Braswell et al., 2012)。在无法获得直接证据的领域,儿童会向所信任的人(如父母)征求意见,对于无法依赖经验验证的概念(如死后的生活、神的永生、祷告的功效等),儿童是仰赖于父母的解释来建构的(Harris & Koenig, 2006; Harris & Richert, 2008)。
(13)

将式(13)代入式(10),可得

(14)
式(14)两边同时乘以σ,可得

(15)

在实际应用中,选换挡电机本身的惯性和位置传感器检测的误差等因素容易造成系统产生抖振现象。抖振将影响系统的精确性,还可能会激发系统未建模动态,引起失稳。为了避免这种现象,采用饱和函数法来将控制输入修正到连续化的边界层[9-10],即将式(12)中的符号函数用饱和函数取代,得到相应的动态滑模控制趋近律:
(16)
4仿真结果分析
根据式(1)~式(16),基于某款电动AMT变速器在MATLAB/Simulink中建立了采用动态滑模控制的选换挡电机的仿真模型,并与采用传统滑模控制(SMC)及PID控制的系统进行比较,观察在不同控制器控制下换挡电机的动态响应特性。以换挡直流电机系统为例,仿真所采用的电机参数见表1。

表1 换挡电机仿真参数
假设AMT选换挡过程开始之前,电机处于静止位置,当TCU发出换挡指令时,控制器接收到的电机角位移目标值相当于一个阶跃输入,即电机的初始状态可表示为X[0]=[000]T。为了更好地与动态滑模控制器进行比较,常规滑模控制器也采用指数趋近律,其中k=300,ε=1。
仿真分别在四种工况下进行:①系统空载换挡;②系统带载换挡,且电机参数均变为原来的两倍;③系统带载换挡,且传感器输入信号受到方差为1的高斯白噪声干扰;④换挡结束后受到外界干扰,系统在2.5~2.8 s期间受到0.5 N·m的干扰力矩。系统仿真结果如图3~图6所示。

图3 系统空载换挡时电机角位移曲线

图4 系统带载换挡且电机参数变为原来的两倍时电机角位移曲线
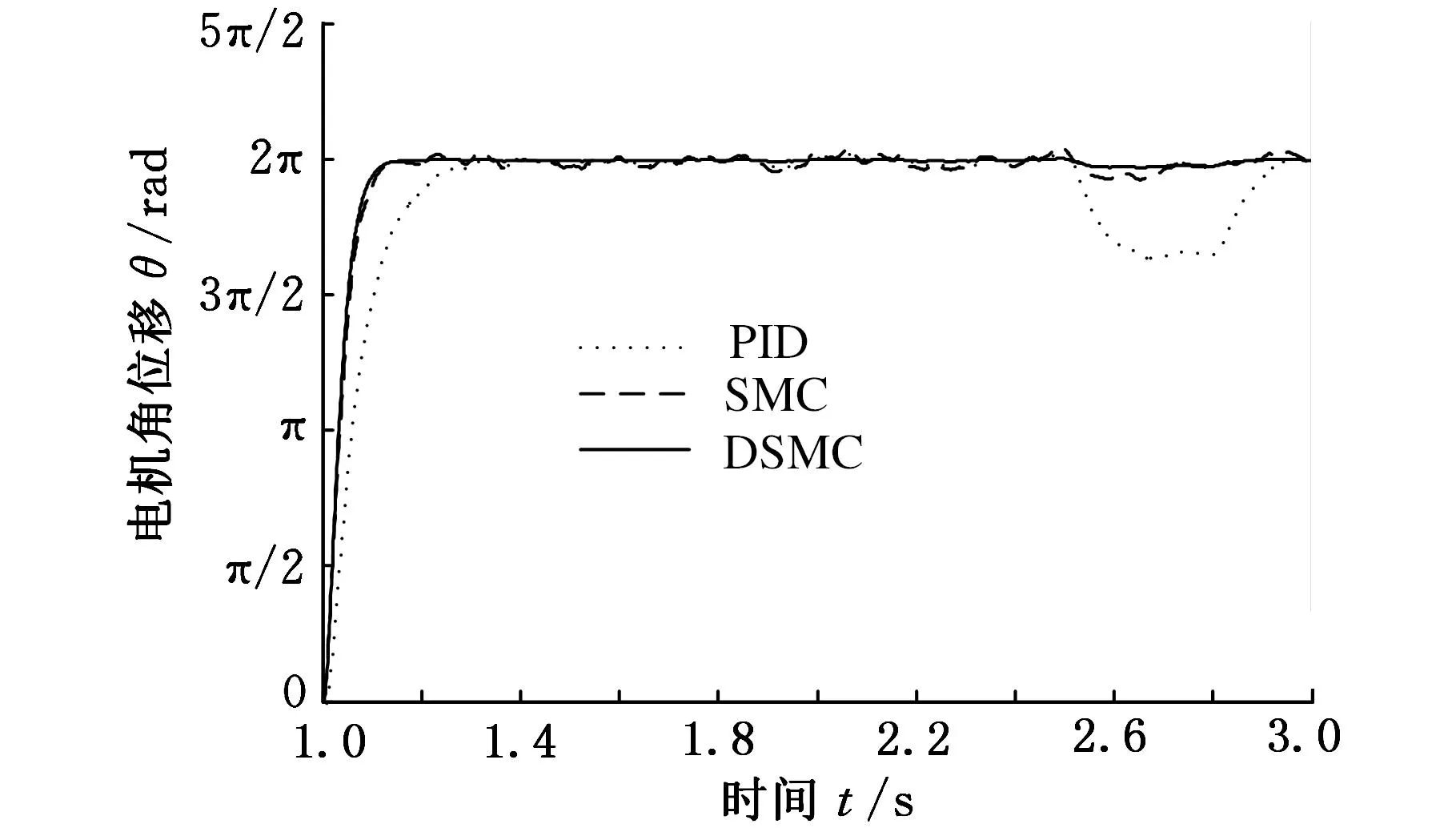
图5 系统带载换挡且存在噪声干扰时电机角位移曲线
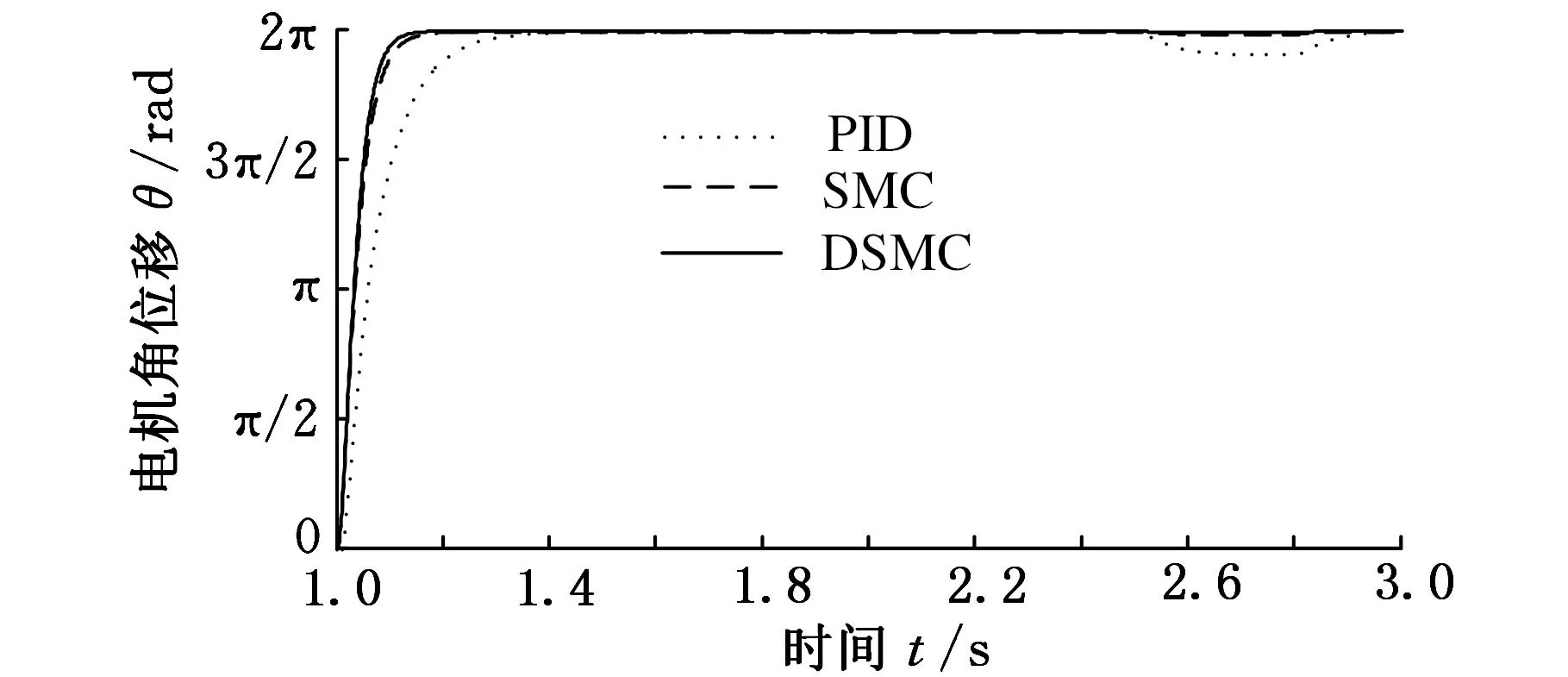
图6 系统换挡结束后受到外部干扰时电机角位移曲线
5试验结果分析
为了进一步验证动态滑模控制器的有效性和正确性,基于dSPACE实时仿真系统的快速控制原型技术完成了AMT选换挡控制程序的开发[11],并进行了相应的台架试验。AMT选换挡控制系统快速原型架构如图7所示,它主要由dSPACE、上位机、发动机、传感器、变速箱和执行机构组成。

图7 AMT选换挡控制系统快速原型架构
在选换挡过程中,车辆达到设定的换挡点时,dSPACE发出控制信号使PWM驱动板通过改变直流电机电压的大小和方向来控制选换挡电机的运动速度及方向,电机会带动相应的执行机构完成选换挡操纵,同时集成在电机上的传感器将电机位置实时发送给dSPACE,从而实现选换挡电机的位置闭环控制。
试验模拟装备AMT的车辆在节气门开度为40%的情况下从静止状态开始加速的过程。在采用三种不同控制方法的情况下,图8、图9所示分别为1至2挡和2至3挡换挡过程中选换挡电机位置的变化情况。通过变速箱选换挡电机位置标定,换挡过程中电机的运动轨迹能够实现精确的控制[12],由于1至2挡换挡过程中选挡电机位置不变,故在1至2挡的换挡时序中只包括退挡和进挡两个过程,而2至3挡的换挡时序则包括退挡、选挡和进挡三个过程。

图8 1至2挡电机位置变化对比

图9 2至3挡电机位置变化对比
由图8和图9可知,常规PID控制在调节过程中出现了超调现象,这有可能会造成选换挡电机堵转,时间过长将导致电机过热甚至烧毁电机线圈。且常规PID控制的调整时间与上升时间相差不大,这就导致常规PID控制1至2挡的总换挡时间达到0.4 s。同理,常规滑模控制方法在换挡调节过程中也存在一定的超调,不过其调整时间较短,1至2挡的总换挡时间为0.29 s。与之相对应的动态滑模控制方法在调节过程中基本无超调,且响应速度也更快,换挡时间仅为0.19 s。在2至3挡的换挡过程中,由于常规PID控制方法和常规滑模控制方法在退挡、选挡及进挡三个过程中都存在一定的超调,所以需要的调整时间相应也较长,这就导致常规PID及常规滑模控制的换挡总时间分别达到了0.6 s、0.53 s,而动态滑模控制方法由于在三个换挡过程中基本无超调,其换挡时间仅为0.38 s。
采集台架运行过程中采用动态滑模控制器控制时不同挡位切换所需的换挡时间,在多次试验后分别对各个挡位切换所用的换挡时间取平均值,得出不同挡位切换时的换挡时间,见表2。

表2 采用动态滑模控制的电动AMT换挡时间 s
为了更好地体现动态滑模控制的响应速度快的特点,本文列出了文献[5]中采用最优控制算法的AMT换挡时间进行对标,见表3[5]。
比较表2和表3的数据可知,与采用最优控制算法相比,运用动态滑模控制算法的电动AMT换挡时间有明显缩短。1挡升2挡仅需0.19 s,而采用最优控制的AMT选换挡系统需要0.42 s;同理,在包含选挡过程的2挡升3挡的换挡过程中,采用动态滑模控制的电动AMT选换挡时间仅为0.38 s,也要优于采用最优控制的0.66 s。综合来看,动态滑模控制的响应时间相较于最优控制有较大的优势。
由于换挡过程中各个阶段受到的换挡阻力及影响因素不同,故换挡电机与选挡电机所需提供的转矩也不同[13],这就要求换挡控制系统对负载变化具有良好的鲁棒性及动态响应能力。同时,针对换挡时系统可能面对的外部干扰,也要求系统对外部扰动具有良好的抗干扰能力。经过对比可知,本文中的动态滑模控制器能在保证控制精度的同时,在这几方面的性能也要优于其他控制器,从而改善了AMT换挡控制系统相应的性能。
6结语
针对AMT选换挡系统具有非线性动态特性、负载突变的特点,本文设计了基于动态滑模控制理论AMT选换挡电机执行机构的动态滑模控制器,通过仿真进行了验证,并进行了基于dSPACE的电动AMT换挡快速控制原型试验。仿真和试验结果均表明,动态滑模控制算法能够明显缩短电动AMT系统的换挡时间,同时提高系统的鲁棒性,能有效地提升换挡品质,从而进一步改善电动AMT汽车的换挡舒适性和动力性。
参考文献:
[1]葛安林. 自动变速器(六)——电控机械式自动变速器(AMT)[J]. 汽车技术,2011(10):1-4.
Ge Anlin. Automatic Transmission(six)—Automatic Mechanical Transmission[J].Automobile Technology,2011(10):1-4.
[2]Bansbach E A. Development of a Shift by Wire Synchronized 5-Speed Manual Transmission[J]. SAE Paper 980831, 1998.
[3]任玉平,葛安林.全电式AMT选换挡系统模糊控制方法研究[J]. 汽车技术,2004(8):11-14.
Ren Yuping,Ge Anlin. Fuzzy Control Method for the Electronic Control Led and Electric Gear Selecting and Shifting System of AMT[J]. Automobile Technology,2004(8):11-14.
[4]申业,吴光强,罗先银. AMT换挡电机的精确跟踪控制[J].汽车技术,2011(10):1-4.
Shen Ye,Wu Guangqiang,Luo Xianyin. Precise Tracking Control of AMT Electric Shift Actuator[J]. Automobile Technology,2011(10):1-4.
[5]高智,钟再敏,孙泽昌. 电动AMT选换挡电机执行机构位置最优控制[J].汽车工程,2011,33(2): 133-137.
Gao Zhi,Zhong Zaimin,Sun Zechang. Optimal Position Control for Motor-driven Shifting Actuator in Electrical AMT[J].Automotive Engineering,2011,33(2):133-137.
[6]赵永胜,刘志峰,杨文通,等.汽车自动离合器的动态滑模控制[J]. 汽车工程, 2009,31(6):536-539.
Zhao Yongsheng,Liu Zhifeng,Yang Wentong,et al. Dynamic Sliding Mode Control for Automatic Clutch of AMT Vehicle[J]. Automotive Engineering,2009,31(6): 536-539.
[7]Bartolini G,Pisano A,Punta E,et al. A Survey of Applications of Second-order Sliding Mode Control to Mechanical Systems[J]. International Journal of Control, 2003,76(9):875-892.
[8]孔国玲,钟再敏,余卓平,等. AMT离合器不分离换挡过程中发动机控制[J].同济大学学报(自然科学版),2012,40(2):267-271.
Kong Guoling,Zhong Zaimin,Yu Zhuoping,et al. Engine Control During Shifting Process of Automatic Mechanical Transmission without Disengaging Clutch[J].Journal of Tongji University(Natural Science),2012,40(2):267-271.
[9]Vicente P V, Gerd H. Chattering-free Mode Control for a Class of Nonlinear Mechanical Systems[J]. International Journal of Robust and Nonlinear Control,2001,11(12):1161-1178.
[10]Swaroop D,Hedrick J K,Yip P P,et al. Dynamic Surface Controller for a Class of Nonlinear Systems[J].IEEE Transactions on Automatic Control,2000,45(10):1893-1899.
[11]邓涛,孙东野,秦大同,等. 重型车辆AMT硬件在环仿真试验研究[J].中国机械工程,2010,21(2):245-251.
Deng Tao,Sun Dongye,Qin Datong,et al. Research on the Hardware-in-the-loop Test System for Heavy Vehicle with AMT[J].China Mechanical Engineering,2010,21(2): 245-251.
[12]王旭,曹健,杨志刚,等.电动式AMT自动查找选换挡空位的方法[J]. 汽车工程,2007,29(11):994-997.
Wang Xu,Cao Jian,Yang Zhigang,et al. A Study on Automatic Detection of Neutral Position for Gear-selection and Gear-shifting of Electrically-controlled ANT[J].Automotive Engineering,2007,29(11):994-997.
[13]魏黎. 基于无刷直流电机的AMT选换挡控制系统研究[D].长春:吉林大学,2007.
(编辑陈勇)
Dynamic Sliding Mode Control of AMT Gear-selection and Shifting Electric Motors
He XiongZhang NongKong Guoling
1.State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hunan University,Changsha,410082 2.Tsinghua University,Beijing,100084
Abstract:Modeling and analyses were carried out on a electric AMT, in order to assuage the long gear selection and shifting time problem of AMT. Based on the theory of sliding mode control, gear selection and shifting dynamic sliding model control was initiated, which was applied in the position track of gear selection and shifting mechanism. Both of the simulation and experimental results reveal that compared to the general PID controller and sliding model controller, dynamic sliding model controller has faster response, better robust, higher track accuracy, which improves the shifting quality of electrical AMT.
Key words:electrical automatic manual transmission(AMT); dynamic sliding mode control; gear-selection and shifting;motor
收稿日期:2015-05-25
中图分类号:U463
DOI:10.3969/j.issn.1004-132X.2016.10.023
作者简介:何雄,男,1991年生。湖南大学机械与运载工程学院硕士研究生。主要研究方向为汽车传动系统控制技术。张农,男,1959年生。湖南大学机械与运载工程学院教授、博士研究生导师。孔国玲,男,1984年生。清华大学机械工程学院博士后研究人员。
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2022年2期)2022-04-26
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
石油化工建设(2020年1期)2020-08-24
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
军事文摘·科学少年(2017年2期)2017-04-26
智能建筑电气技术(2015年5期)2015-12-10