
一种基于车联网的智能监控调度系统设计与实现
2016-06-16 22:28王勇
电脑知识与技术 2016年10期
王勇

摘要:为了科学的管理及控制车辆,保证道路畅通,改善交通道路安全,应用ARM技术、GIS技术、无线通信等技术,研制了一套以无线数据分组通信技术组网的智能交通监控调度系统,实现了车辆的联网,能及时了解车辆周边的交通信息状态,可以更方便安排出行时间和路线,提高交通效率。实践证明,设计可行。
关键词:车联网;智能监控调度; ARM;GIS;GPRS;
中图分类号:U495 文献标识码:A 文章编号:1009-3044(2016)10-0275-03
Abstract: In order to scientific management and control of the vehicle to ensure smooth road, improve road traffic safety, the application of ARM technology, GIS technology, wireless communication technology developed a wireless packet data communication network technology of intelligent traffic monitoring and dispatching system, the realization of the networked vehicle, to keep abreast of the surrounding vehicles traffic state information can be more convenient to arrange travel time and route, improve the efficiency of transportation. Practice proves that the design is feasible.
Key words: vehicle networking; intelligent monitoring and dispatching; ARM; GIS; GPRS;
随着私家车的迅猛增长,道路建设速度远远跟不上汽车的增长速度,由此引发的交通拥堵,交通事故,能源与环境等社会问题日益严重。如何科学的管理和控制车辆,保证交通畅通,改善道路安全和提高交通系统的效率和效益成为我们急需解决的问题,而基于车联网智能监控调度系统就是能够满足这种需要的技术手段,它是在将车辆统一联网后,集GPS定位技术和GIS地理信息技术于一体的高科技系统,主要功能是对移动车辆进行实时跟踪,利用无线通信技术组网,将目标车辆的位置、速度等其他关键信息传送到控制中心,可以在车载终端和控制中心进行地图匹配后,显示在导航面板和监视器上。监控中心还可以对移动车辆的准确位置、速度和状态等参数进行监控和查询,从而可以科学的进行调度和管理,提高交通的运行效率和效益及交通设备的安全。
1 系统结构及工作原理
车联网智能监控调度系统的整体架构如图1所示。
整个系统有三部分构成,分别为车载终端,无线数据通信网络和数据监控中心。车载终端集成了用以感知车辆速度和经纬度的GPS模块,用于收发数据的GPRS模块,和车载行车电脑上的各种传感器。无线数据通信网络是整个系统的桥梁,承载着车载终端和数据监控中心的重任。数据监控中心对整个联网的车辆进行数据收集,地图显示和匹配,车辆的监控与调度等功能,是整个系统的核心。系统的工作原理是,安装在车载终端上的各种传感器,采集车辆的经纬度,方向,速度等信息,然后将采集到的信息通过无线数据通信网络传回到监控中心,监控中心利用强大数据处理能力,对传回的数据进行地图匹配路径规划等方面数据综合处理,将结果显示在监控口,从而对车辆进行监控与调度等操作功能。
2系统硬件设计
系统硬件平台主要就是车载终端的设计,车载终端主要负责GPS模块和GPRS模块的数据处理,考虑到硬件设计和软件设计的难易程度,以及实时的需求,系统采用基于嵌入式处理器架构设计,采用市场成熟的嵌入式处理器S3C2440,此芯片运算快,并且提供两个串口,分别连接GPS模块和GPRS模块。车载终端的硬件架构如图2所示。
车载终端是系统的一个重要模块,负责采集车辆的运行状态,经纬度,速度等各种终端数据信息,不仅负责将收集的数据发回到监控中心,而且接收从监控中心返回的调度命令,是整个系统的感知和行动终端。
2.1电源模块设计
电源模块是车联网车载终端的重要组成部分,对系统的高速稳定运行其关键作用,由于车载电源能提供12V和24V电源,而嵌入式处理器S3C2440采用三种电源:内核供电为1.8V,片上外设采用3.3V,外部接口使用5V。又由于汽车电器环境复杂,汽车在点火和正常运行是对蓄电池的充电时,都会对输出电压产生很大的变化,因此电源设计要采用宽电源调整DC-DC变换芯片,经过综合比较,最后选择开关电源调节芯片LM2576,将电源12V或者24V变换为外部接口主电源5V,然后采用AS1117芯片分别转换为3.3V和1.8V的电源。
2.2GPS/GPRS/GSM集成模块
为了减少车载终端的硬件设计难度和PCB的面积,我们选用了集成GPS/GPRS一体的芯片SIM908,该芯片尺寸为30*30*3.2mm,使用5V供电,带有两个串口,支持电池充电管理,功耗低,静态待机电流仅为1.0mA,内部集成TCP/IP协议,上行速率最大为42.8bps,下行速率最大为85.6bps,所以非常适合移动终端产品应用。
3 系统软件仿真与设计
车辆监控调度系统的软件结构分为下位机软件和上位机软件两部分,软件系统的整体框图如图3所示。
下位机软件是指运行在车载终端的嵌入式S3C2440处理器上的软件,它是一个基于linux操作系统的嵌入式软件系统。Boatloader位于最底层,负责初始化硬件和引导其上的操作系统。本设计的下位机软件要对操作系统进行简单的裁剪,并在此操作系统的基础上编写应用软件,主要完成三大任务,车辆速度传感器采集任务,在GPS接收受阻时应用推算(DR)导航应用,GPS定位数据采集任务负责GPS点位数据的接收解析和存储,GPRS无线数据任务负责将采集到的定位数据定时传送到远程监控中心。
上位机软件是指运行于远程监控中心得PC机上的软件,该软件的关键是车载监测数据接收软件和本地数据库管理系统。在上位机软件开发中,关键是数据的接收存储查询等,主要数据库的操作,地图匹配算法等,应用面向对象的界面设计。鉴于篇幅有限,上位机软件本文不做介绍,下面主要对下位机软件的几个模块来说明。
3.1 GPS模块
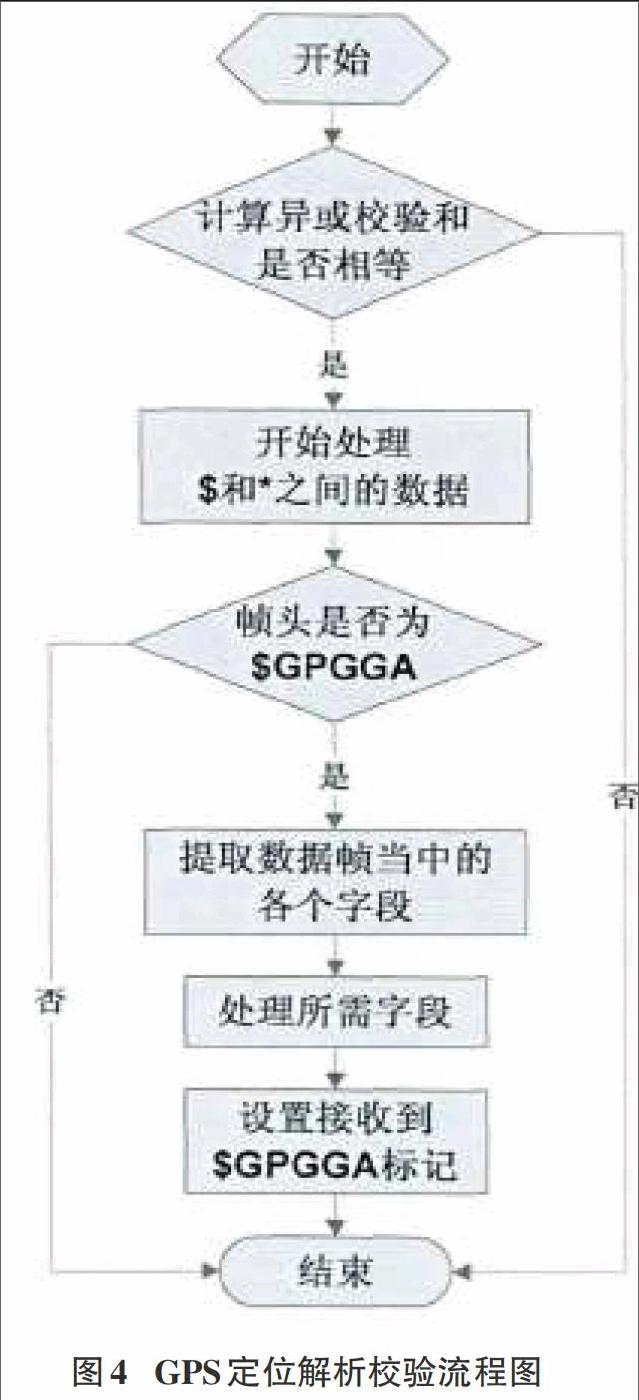
为了保证GPS定位数据的可靠性和准确性,软件设计每帧数据必须校验,具体操作以异或和的奇偶来确定数据是否可靠,因为GPS数据以‘$为开始符号,只需设计一个结束符号‘*,在这两个符号之间的每个字符应用ASCII码做异或运算,用此异或和跟帧数末尾的校验和比较,相等可靠,解析数据有效,否则无效。具体操作见图4。
3.2 GPRS无线数据通信模块
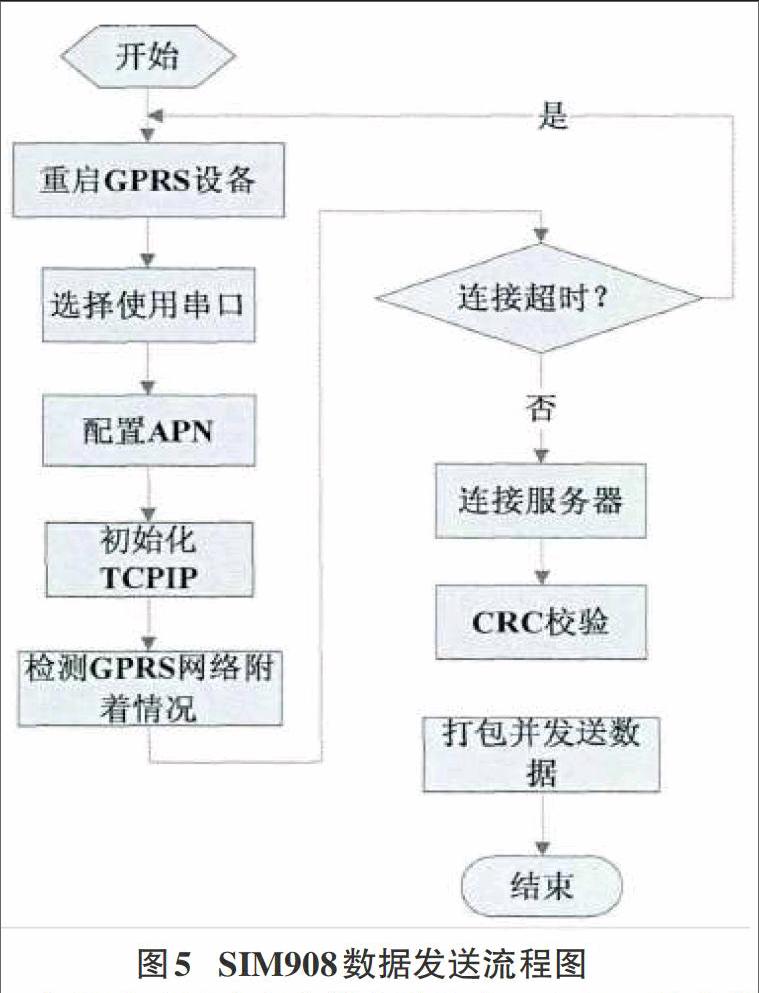
车载终端使用嵌入式微处理器S3C2440的两个串口控制SIM908,其应用程序的操作流程如图5所示。
由于本设计采用动态数据定时发送,而GPRS模块如果在长时间内没有数据收发操作,往往会掉线,一旦掉线就需要重新建立连接,为了保证数据的有效传输,软件要定时的使用AT+CGREG指令检测是否在线,这样可以有效的提高数据传输的可靠性。在在线的情况下,SIM908通过指定的端口和IP地址或动态域名,向监控中心服务器传送数据,而监控中心服务器通过网络套接字接收数据,将数据存储在数据库内。
3.3 Linux操作系统软件
Linux操作系统是一个开源,可移值,可固化,可裁剪,抢先式,多任务的实时操作系统,结构较简单,比较适合小型的应用系统,本设计中的车载终端就是小型的嵌入式应用系统,所有应用程序都建立在此操作系统之上,而LINUX运行的基础是以ARM9芯片S3C2440为核心的硬件平台。根据硬件平台的不同可以对boatloader和Linux的内核进行裁剪,以使车载硬件和软件相匹配,达到程序的高速高效运行。
4 总结
本文设计了一套车联网智能监控调度系统,通过具体的硬件设计和软件编写,完成了车载终端的数据采集发送功能以及远程监控中心数据处理与显示功能,实际测试结果证明,基本实现预定功能,达到设计要求,是智能交通管理的重要方向,具有实际推广价值。
参考文献:
[1] 王丽欣.基于GPS/GSM的车辆定位跟踪系统设计与实现 [D]. 沈阳:沈阳工业大学,2013.
[2] 邢子山.基于GPS的自动报站系统的设计与实现 [D]. 北京:北京邮电大学,2012.
[3] 陈宇.一种基于GPS/GPRS技术的校车管理系统 [D]. 成都:电子科技大学,2012.
[4] 边馥等.地理信息系统原理和方法 [M]. 北京:测绘出版社,1996.
[5] 朱勇.GPS车辆监控指挥系统关键技术的设计与实现 [D]. 成都:电子科技大学,2007.
[6] 杜诚.基于GPS和GIS的车辆导航及监控系统设计与实现 [D]. 成都:西南交通大学,2005.
[7] 王建鹏.GPS_GPRS_GIS集成技术在车辆定位与监控中的应用 [D]. 武汉:武汉大学,2005.
[8] 张乐.火车槽罐储液温度及地理位置信息远程车载监测系统 [D]. 南京:南京理工大学,2012.
[9] 史其信,“物联网”打造下一代智能交通系统[J].交通标准化, 2010(24).
