内分泌LQR控制策略及其主动悬架减振研究
2016-06-17 01:22于德介陈中祥蒋明华
振动与冲击 2016年10期
关键词:智能控制
金 耀, 于德介, 陈中祥, 蒋明华, 贺 欣
(1. 湖南师范大学 工程与设计学院,长沙 410081;2. 湖南大学 汽车车身先进设计制造国家重点实验室,长沙 410082)
内分泌LQR控制策略及其主动悬架减振研究
金耀1, 于德介2, 陈中祥1, 蒋明华1, 贺欣1
(1. 湖南师范大学 工程与设计学院,长沙410081;2. 湖南大学 汽车车身先进设计制造国家重点实验室,长沙410082)
摘要:基于生物内分泌系统激素调节机理设计了内分泌智能控制器,结合传统的线性二次型调节器(LQR),提出一种新型复合结构的内分泌LQR控制器。将其应用于汽车主动悬架减振控制,采用ADAMS/View构建麦弗逊汽车悬架模型,以典型的正弦路面输入和随机路面输入作为激励,通过MATLAB与ADAMS联合仿真对比分析了内分泌LQR控制、传统LQR控制及被动悬架的减振效果。研究结果表明,内分泌LQR控制品质优良、对变化的工况参数具较好的适应性,减振效果要优于传统LQR控制。该方法为主动悬架减振提供了一种新的控制方案,同时也为内分泌智能控制策略及其应用提供了新思路。
关键词:主动悬架;内分泌系统;LQR;智能控制;减振控制
随着人们对汽车舒适性和安全性的不断追求,采用电控主动减振技术来提高舒适性、操纵稳定性等动力学性能的主动悬架是未来汽车发展的一个趋势,受到国内外汽车制造商和科研机构的日益重视[1-2]。汽车主动悬架性能好坏的一个关键是控制策略的选取。不同的控制策略,会导致不同的悬架特性和减振效果。迄今已有各种控制方法不断被用于悬架系统,其中智能控制策略,包括模糊控制、神经网络、遗传算法及其组合[3-5]、仿人智能控制[6]等,因能模仿人的智能、自学习自适应能力强、可明显提高控制品质而成为当前的研究热点。
内分泌系统和神经系统、免疫系统并称为人体三大生理调节系统,对其生物信息处理机制的研究与借鉴是智能控制的一个新方向,近年来开始受到关注[7-8]。顾文斌等[9]提出了一种基于激素调节机制的自适应粒子群优化算法,应用于置换流水车间的调度问题。刘宝等[10]基于内分泌激素反馈调节原理设计了一种双层控制器,应用于某二阶液位流量系统的液位控制。Ding等[11]基于神经内分泌系统协同调节原理,提出了一种智能协同解耦控制器,应用于碳纤维生产线凝固浴的液位、温度、浓度复合控制。王磊等[12]提出了基于晶格(内分泌细胞)的人工内分泌系统模型,利用模型中内分泌细胞之间的激素信息通信及协同作用,来解决多机器人系统的分布式控制问题。这些人工内分泌模型、算法的初步研究与应用,显示了人工内分泌智能技术的重要理论意义和应用价值。但是,相对于人工神经网络和人工免疫系统的深入研究与广泛应用,人工内分泌智能系统在理论研究和工程应用方面尚处于起步阶段,亟待进一步发展。
从上述内分泌控制的应用研究可知,内分泌系统的一个重要作用,就是作为人体各种激素的调控中心,通过调控激素来调节整个机体的生长、发育、代谢和生殖,提高人体对内外复杂环境的感知和适应能力,且这种激素调控机制具有较好的自学习、自适应能力和稳定性等优点。而汽车在不平路面上行驶时,不可避免地会遭遇到随机变化的路面干扰和变化的车身质量、轮胎刚度等不确定工况,悬架控制器应该具有适应复杂不确定环境的能力。因此,借鉴内分泌系统激素调控机制来处理悬架对复杂不确定环境的敏感和适应能力,符合主动悬架减振控制的基本要求,有可能提高主动悬架在复杂工况下的控制品质,同时也符合主动悬架的智能化技术趋势。目前,关于悬架系统内分泌智能控制的文献报道尚不多见。
因此,本文拟在主动悬架减振控制中引入内分泌智能策略,在文献[10]提出的内分泌控制器基础上,融合传统的线性二次型调节器(LQR),提出一种新型复合结构的内分泌LQR智能控制策略,以期利用内分泌系统对环境变化的天然适应和调节能力来改进传统LQR的控制性能,提高主动悬架系统在不确定工况下的控制品质和自适应性能。研究结果验证了所提出的内分泌LQR方法的有效性,为主动悬架减振控制提供了一种新方法,并对促进内分泌智能控制技术的发展、拓宽其应用领域有所助益。
1内分泌系统的激素调节机制
内分泌系统的激素调节机制类似于控制理论中闭环反馈调节机制,调节回路是由下丘脑—垂体—内分泌腺体组成的三级水平系统[13],见图1。内分泌腺(甲状腺、肾上腺、性腺等)分泌相应的激素H3(甲状腺素、肾上腺素、睾丸素等),来调节机体的新陈代谢。激素调节的具体过程如下:
下丘脑分泌促垂体激素H1作用于垂体,H1刺激垂体分泌促激素H2,H2作用于内分泌腺的分泌细胞,使之产生相应的激素H3,发挥其生理调节作用(H1、H2、H3都是多种激素的通称)。这便是激素H3浓度的正反馈增强调节。当腺体激素H3浓度过高,该浓度通过传导因子或感受器负反馈给垂体和下丘脑,引起H1和H2的分泌降低,使内分泌腺分泌的激素H3浓度减少,最终达到某一平衡稳定状态,这就是激素H3浓度的负反馈抑制调节。通过上述正负反馈调节,使内分泌腺分泌的激素H3在体内的浓度得到精确、稳定地控制。
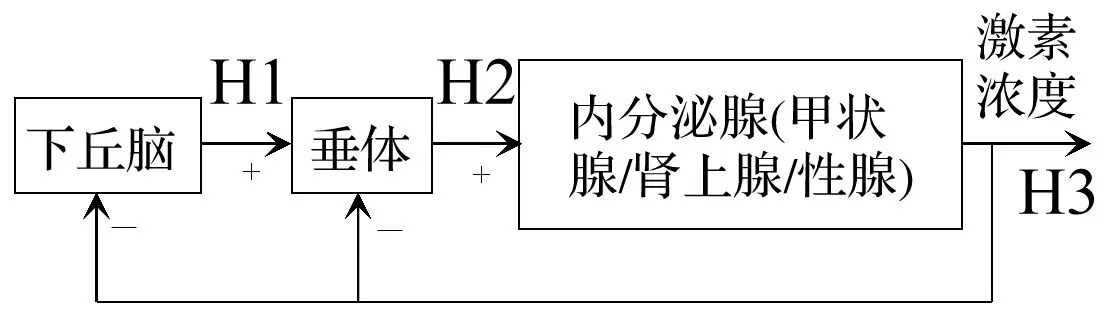
图1 内分泌系统激素调节回路Fig.1 Regulation loop of endocrine hormone
2内分泌LQR控制器设计
2.1控制系统结构
本文提出的内分泌LQR控制器结构如图2所示,由LQR控制器与内分泌控制器串级构成复合型控制器。图中,LQR控制器为前级控制器,虚线框里的内分泌控制器为后级控制器,内分泌控制器由一级控制器、二级控制器及作动器组成。作动器是产生主动控制力的执行机构,置于被控对象悬架系统中。其中,X为悬架系统状态变量,y是悬架输出车身垂直加速度,u0为LQR控制器输出,u为主动控制力,e1、u1和e2、u2分别为一、二级控制器的偏差和控制输出。
内分泌控制器结构是对图1所示内分泌系统激素调节回路的抽象和提取,由两级控制器串联而成。一级控制器对应下丘脑,二级控制器对应垂体,作动器对应内分泌腺,悬架输出车身垂直加速度y对应腺体激素H3浓度。内分泌控制器与主、副控制器构成的传统串级控制器结构有几分相似,但反馈控制机理不同,内分泌控制器中一、二级控制器的反馈量相同(均采用被控对象输出为反馈量),而传统串级控制器中主控制器和副控制器分别采用主被控变量和副被控变量这两个不同的被控量为反馈量。而且,LQR控制器的输出u0作用于内分泌控制器中的一级控制器,直接影响其控制输出。
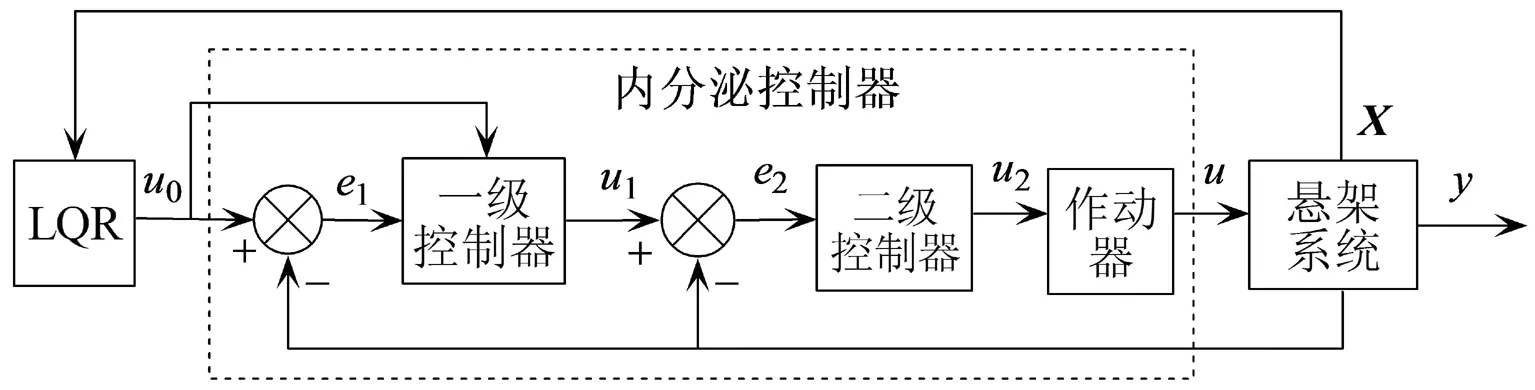
图2 内分泌LQR控制器结构Fig.2 Structure of endocrine LQR controller
由图2可知,内分泌控制器中的闭环反馈控制结构与内分泌系统激素调节回路中的正负反馈调节结构如出一辙。这种结构上的模拟仿生使得内分泌控制器必然按照内分泌系统的激素调节原理工作,因而也具备与内分泌激素调控系统相似的自适应性和稳定性。而且,内分泌控制器与LQR控制器采用串级融合方式,既能发挥LQR控制器对悬架系统多变量控制的传统优势,又能综合内分泌策略对不确定复杂对象的智能自适应特点。对汽车悬架这类典型的不确定非线性系统而言,采用内分泌LQR这种复合型控制方法,比采用单一的内分泌控制或LQR控制,更有可能提高系统在复杂不确定条件下的自适应性及智能程度。
2.2LQR控制器设计
LQR是一种经典的多变量控制器,它基于状态反馈来设计控制律。本文根据图3独立地进行LQR控制器设计,此时不需考虑内分泌控制器的影响,为后续与内分泌控制器的复合奠定基础。LQR的控制输出u0可表示成如下的状态变量负反馈形式:
u0=-KX
(1)
式中:K为最优反馈增益矩阵,X为悬架系统状态变量。LQR控制器具体设计及最优反馈增益矩阵K取值见文献[14-15]。
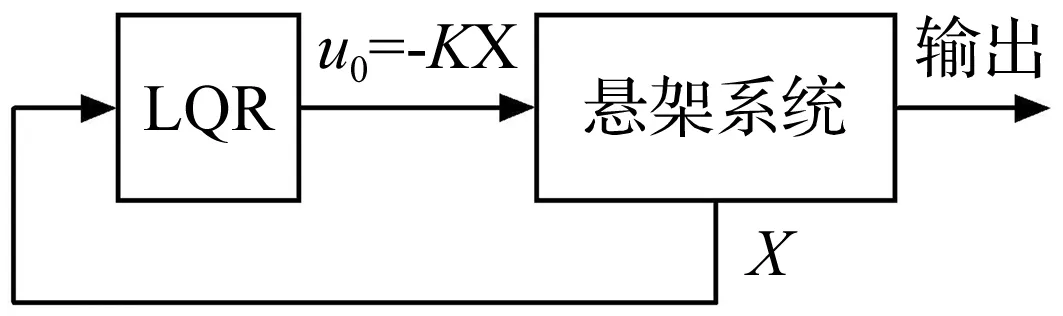
图3 LQR控制器Fig.3 LQR controller
2.3内分泌控制器设计
2.3 .1一级控制器
一级控制器的作用是动态改变二级控制器的设定值输入,从而快速稳定地消除控制偏差,它以LQR控制器输出u0及偏差e1作为输入,控制输出u1为:
u1=K1e1+u0=K1(u0 —y)+u0
(2)
式中,K1>0为一级控制器的比例系数。
2.3 .2二级控制器
二级控制器接受一级控制器调节,其设定值为一级控制器输出u1。本文中二级控制器采用常规PID控制,其控制输出u2为:
(3)
式中,Kp、Ki、Kd分别为PID控制中比例、积分、微分系数,误差信号e2计算表达式为:
e2=u1—y
(4)
以式(1) LQR控制器为基础,与式(2)~式(4)内分泌控制器串级复合,便构成一个完整的内分泌LQR控制器。其中内分泌控制器参数的选取,采用了传统PID 控制器参数选取中常见的人工试凑方法,先试凑选取二级控制器的PID比例、积分、微分系数,再选取调整一级控制器的比例系数,直到控制效果满足要求为止。
3主动悬架模型
本文以二自由度麦弗逊悬架为研究对象。采用ADAMS虚拟样机软件中View模块建立反映麦弗逊悬架空间结构特征的三维模型,如图4所示。
该模型包括弹簧上、下支座、车身、转向节总成、下横臂、车轴、车轮和地面部件8个实体。不考虑车轮的转向和旋转,车轮和车轴、车轴和转向节总成都是固定约束,下横臂的一端用铰链约束在车身上,另一端用球铰约束在转向节总成上,地面部件与参考大地间为滑移副约束。如果在地面部件上增加一个上下运动的位移作为路面输入,在车身弹簧处添加一个作用力代表作动器产生的主动控制力,则该ADAMS模型可等价为图5中1/4主动悬架模型的虚拟实现,数学模型详见文献[14-15]。
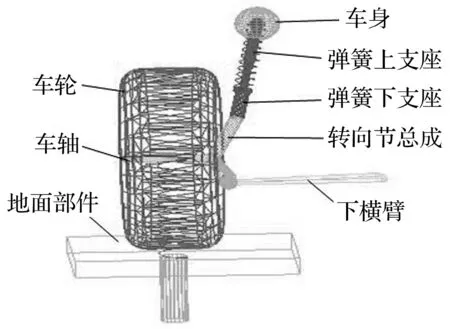
图4 麦弗逊悬架Fig.4 Mcpherson suspension mode
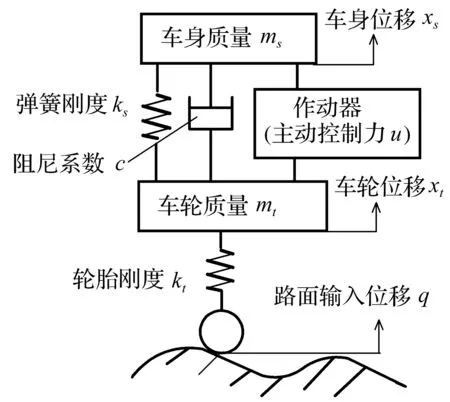
图5 1/4汽车主动悬架模型Fig.5 1/4 active suspension mode
4仿真及结果分析

4.1正弦路面输入
仿真中正弦路面输入位移为q=0.055 7 sin(7.7t) m。麦弗逊悬架模型名义参数值[14]分别是:车身质量250 kg,车轮质量30 kg,悬架弹簧刚度15 000 N/m,减振器阻尼系数1 000 N·s/m,轮胎刚度150 000 N/m。仿真中,内分泌控制器参数K1、Kp、Ki、Kd分别为24、0.15、0.001、0,LQR控制器参数取值见文献[14]。先取模型名义参数值进行仿真;然后改变参数(车身质量增加50%,且轮胎刚度下降30%)以考察控制器自适应性能;将内分泌LQR控制、LQR控制[14]、被动悬架进行对比。
仿真结果见图6和表1。可知,当取名义参数时,相比于被动悬架,内分泌LQR控制和LQR控制这两个主动悬架的三个输出量都有较大幅度降低,改善了行驶平顺性和安全性,减振效果显著。内分泌LQR控制相比于LQR控制:其车身加速度仅为LQR的33.35%,意味着减振平顺性更好;车轮动位移为LQR的50%,说明安全性也优于LQR;悬架动行程稍逊色于LQR。当模型参数在较大范围内变化时,内分泌LQR控制下的悬架系统三个性能指标值均优于其它二者,且三个性能指标的变化百分比也都小于LQR控制,说明在悬架参数变化较大时内分泌LQR控制系统对这种参数不确定的敏感性相对较低,表现出良好的适应能力和控制品质。
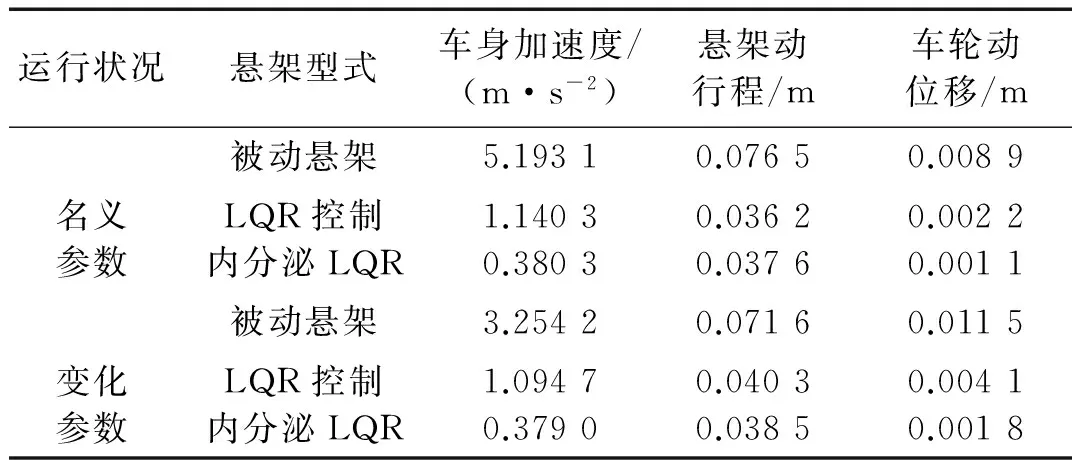
表1 正弦输入时悬架输出均方根值对比
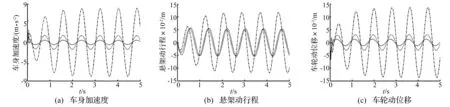
(实线—内分泌LQR;点线…LQR;点虚线-·- 被动悬架)图6 正弦路面输入时悬架输出响应曲线Fig.6 Suspension output responses under sine road input
4.2随机路面输入
仿真时,假设汽车以20 m/s车速行驶在路面不平度系数为5×10-6m3/cycle的路面上,路面输入采用一阶滤波白噪声。麦弗逊悬架模型名义参数值[15]分别为:车身质量320 kg,车轮质量40 kg,轮胎刚度200 000 N/m,主动悬架弹簧刚度20 000 N/m,被动悬架弹簧刚度22 000 N/m,被动悬架减振器阻尼系数1 000 N·s/m。仿真中,内分泌控制器参数K1、Kp、Ki、Kd分别为1.2、0.42、0.002、0.000 05,LQR控制器参数取值同文献[15]。同正弦路面输入仿真一样,先后取名义参数值和变化参数值(车身质量增加30%,同时轮胎刚度下降20%)进行仿真,将内分泌LQR控制与被动悬架、文献[15]中的LQR控制进行对比分析(仿真时长、路面输入等均相同)。
图7(a)、(b)分别为名义参数下的被动悬架及内分泌LQR主动悬架的车身加速度功率谱密度,即频域结果。从该功率谱图可以看出,在车身固有频率(1.2 Hz)附近,内分泌LQR的共振峰值被抑制而变得较小,远低于被动悬架,减振效果明显。LQR的频谱图与内分泌LQR类似,限于篇幅不再列出。
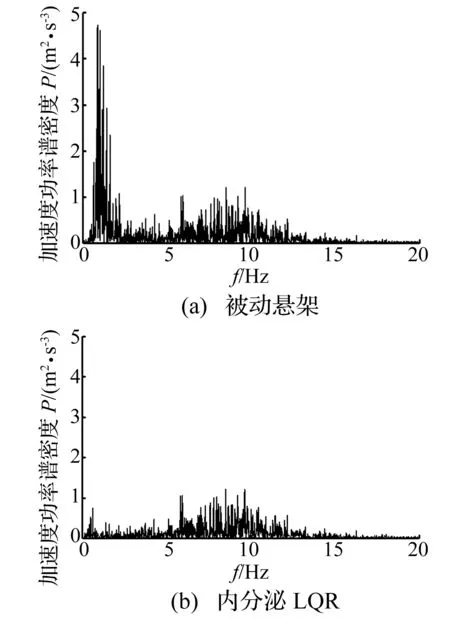
图7 随机路面输入时车身加速度功率谱密度Fig.7 Power spectral densities of vehicle body acceleration under random road input
时域仿真结果见图8、图9和表2。当取名义参数时,LQR及被动悬架的仿真结果数据与文献 [15]接近,基本复现了文献 [15]中悬架系统的随机响应结果。进一步将LQR、被动悬架与内分泌LQR进行对比,可知:相比于被动悬架,内分泌LQR和LQR这两种主动悬架的车身加速度都明显降低、有效地改善了平顺性,车轮动位移也略胜一筹,悬架动行程虽有所增大,但也被很好地控制在设计的工作范围之内(±100 mm)。内分泌LQR控制相比于LQR控制,车身加速度和悬架动行程这两个性能指标值均更优,尤其是悬架动行程要明显优于LQR,尽管车轮动位移指标值两者基本相同。当悬架参数变化时,内分泌LQR控制仍能保持更佳的控制性能,并对悬架参数的不确定表现出较好的适应性。必须指出,随机路面激励时内分泌LQR与LQR的减振效果不如正弦路面激励时的情况,这是因为随机激励比单频正弦激励包含了更多更宽的频率信号,从而使其控制处理的难度加大。这与文献[4,15]所揭示的主动悬架对随机路面激励时的减振规律基本一致。
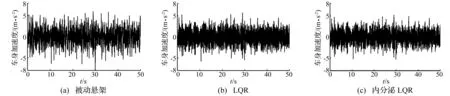
图8 随机路面输入时悬架加速度响应曲线Fig.8 Responses of vehicle body acceleration under random road input
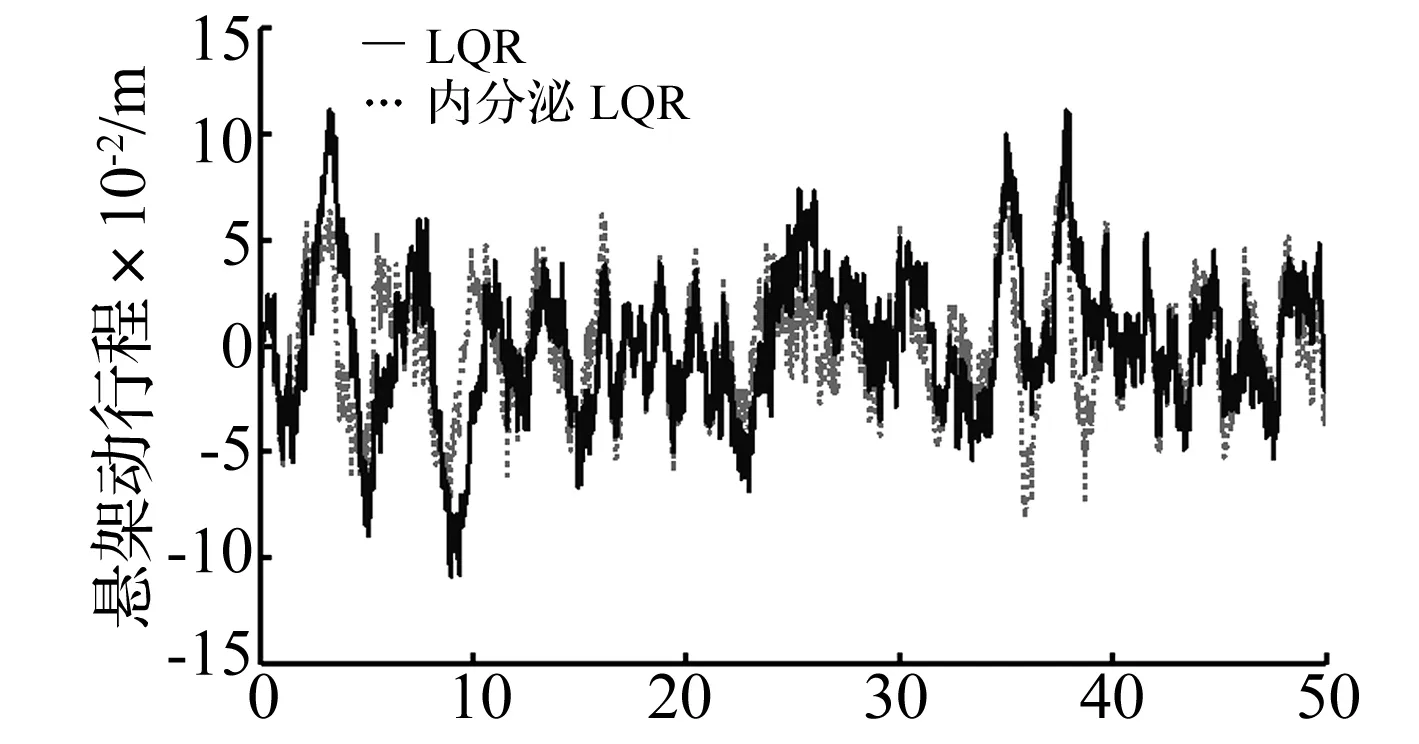
(实线—LQR;点线…内分泌LQR)图9 随机路面输入时两种主动悬架动行程曲线Fig.9 Dynamic travel responses of active suspensions under random road input
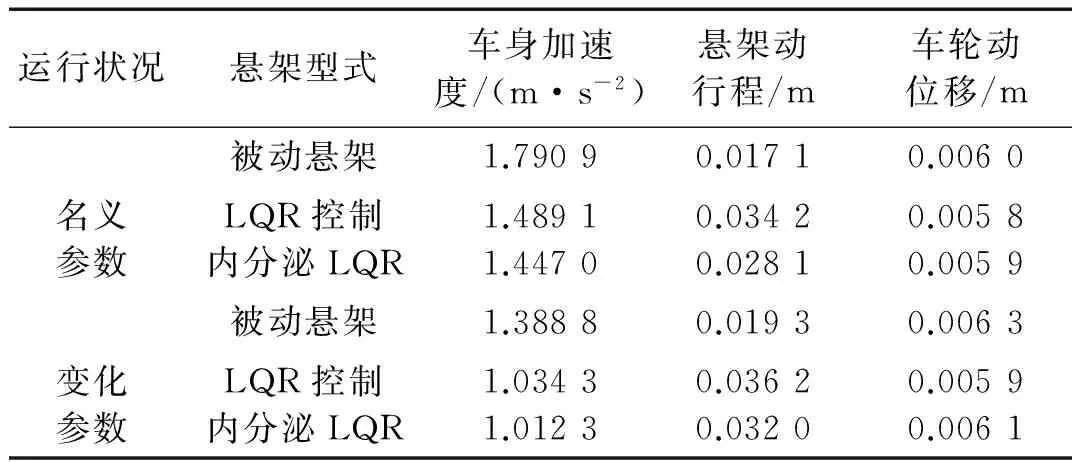
运行状况悬架型式车身加速度/(m·s-2)悬架动行程/m车轮动位移/m被动悬架1.79090.01710.0060名义参数LQR控制内分泌LQR1.48911.44700.03420.02810.00580.0059被动悬架1.38880.01930.0063变化参数LQR控制内分泌LQR1.03431.01230.03620.03200.00590.0061
综合上述内分泌LQR控制的悬架减振效果,探究其良好控制品质的原因,应该归功于这种复合控制器成功地借鉴了内分泌激素调节系统所具有的良好自适应能力和稳定性等优点,并适当地融合了LQR控制器在多变量控制方面的优势。
5结论
(1) 本文在融合基于内分泌系统激素调节机理的内分泌智能控制器和传统的线性二次型调节器(LQR)各自优点的基础上,提出一种新型复合结构的内分泌LQR控制器,并应用于主动悬架减振控制。利用MATLAB设计控制器模型,基于ADAMS建立麦弗逊汽车悬架模型,联合仿真结果表明,该控制方法能改善汽车行驶性能,具有良好的控制品质和自适应性能,减振效果优于传统的LQR控制。这表明所提出的内分泌LQR方法成功地借鉴了内分泌激素调节系统自适应能力较强的优点,并保留了LQR控制器的多变量控制优势。
(2) 所建议的内分泌LQR控制器是对现有内分泌智能控制器的补充和丰富,但在控制机理和应用范围方面还有待于进一步深入和继续探索,比如在已有的传统或智能控制策略与现有的内分泌算法之间是否还能通过某种组合构造出其它形式、结构的复合内分泌策略?能否对内分泌系统的信息处理机制作进一步分析和抽取,构造新的内分泌理论模型?此外,在现有的内分泌理论成果基础上,进一步加强其在工程领域尤其是机械领域中的应用研究,拓展其应用范围,以满足复杂工程系统对智能信息处理的应用需求。
参 考 文 献
[1] Cao Dong-pu, Song Xu-bin, Mehdi A. Editors’ perspectives:road vehicle suspension design, dynamics, and control[J].Vehicle System Dynamics,2011,49(1/2):3-28.
[2] 余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[3] Cao Jiang-tao, Liu Hong-hai, Li Ping, et al. State of the art in vehicle active suspension adaptive control systems based on intelligent methodologies[J]. IEEE Transactions on Intelligent Transportation Systems,2008,9(3): 392-405.
[4] 黄晨,陈龙,袁朝春,等.半主动悬架系统的混合模糊控制[J].汽车工程,2014,36(8):512-517.
HUANG Chen, CHEN Long, YUAN Zhao-chun, et al. Hybrid fuzzy control of semi-active suspension system[J]. Automotive Engineering, 2014,36(8):512-517.
[5] 王威,宋玉玲,王体春,等.非确定因素下汽车半主动悬架的智能控制[J].工程力学,2012,29(9):337-342.
WANG Wei, SONG Yu-ling, WANG Ti-chun, et al. Intelligent control of automotive semi-active suspension with uncertain factors[J]. Engineering Mechanics,2012,29(9):337-342.
[6] Yu Miao, Dong Xiao-min, Choi S B, et al. Human simulated intelligent control of vehicle suspension system with MR dampers[J]. Journal of Sound and Vibration,2009,319(3/4/5):753-767.
[7] Mendao M. A neuro-endocrine control architecture applied to mobile robotics[D]. Canterbury,UK:University of Kent,2007.
[8] Xu Qing-zheng, Wang Lei. Recent advances in the artificial endocrine system[J]. Journal of Zhejiang University:Science C, 2011, 12(3): 171-183.
[9] 顾文斌,唐敦兵,郑堃,等. 基于激素调节机制改进型自适应粒子群算法在置换流水车间调度中的应用研究[J]. 机械工程学报,2012,48(14): 177-182.
GU Wen-bin, TANG Dun-bing, ZENG Kun, et al. Research on permutation flow-shop scheduling problem based on improved adaptive particle swarm optimization algorithm with hormone modulation mechanism[J]. China Journal of Mechanical Engineering,2012,48(14): 177-182.
[10] 刘宝, 丁永生. 一种基于睾丸素分泌调节原理的双层结构控制器[J].上海交通大学学报, 2006, 40(5): 822-824.
LIU Bao, DING Yong-sheng. A two-level controller based on the modulation principle of testosterone release[J]. Journal of Shanghai Jiaotong University,2006, 40(5): 822-824.
[11] Ding Yong-sheng, Xiao Liang, Hao Kuang-rong,et al. An intelligent cooperative decoupling controller for coagulation bath in polyacrylonitrile carbon fiber production[J]. IEEE Transactions on Control Systems Technology,2013,21(2):467-479.
[12] 王磊,徐庆征. 基于晶格的人工内分泌系统模型及在多机器人系统中的应用[J]. 中国科学:信息科学,2011,41(5): 562-579.
WANG Lei, XU Qing-zheng. Lattice-based artificial endocrine system model and its application in robotic swarms[J]. Science China:Information Sciences,2011,41(5): 562-579.
[13] Tilbrook A J, Clarke I J. Neuroendocrine mechanisms of innate states of attenuated responsiveness of the hypothalamo-pituitary adrenal axis to stress[J]. Frontiers in Neuroendocrinology,2006,27(3):285-307.
[14] 金耀,于德介,宋晓琳. 主动悬架的一种基于状态反馈的单神经元多变量控制策略[J].振动与冲击,2008,27(8): 12-15.
JIN Yao, YU De-jie, SONG Xiao-lin. Single neuron multivariables control strategy for active suspensions based on state feedback[J]. Journal of Vibration and Shock,2008,27(8):12-15.
[15] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
Endocrine LQR control strategy and its application in vibration suppression by active suspensions
JIN Yao1, YU De-jie2, CHEN Zhong-xiang1, JIANG Ming-hua1, HE Xin1
(1. College of Engineering and Design, Hunan Normal University, Changsha 410081, China;2. State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan University, Changsha 410082, China)
Abstract:By combining the traditional linear quadratic regulator (LQR) with the endocrine intelligent controller which is based on the endocrine hormony regulation principle, a new compound endocrine LQR controller was proposed. The proposed strategy was then applied to the vibration control of vehicle active suspension, in which a Mcpherson suspension mode was established by using ADAMS/View. With sine and random excitations as the typical road inputs, a comparison was performed among the endocrine LQR, LQR and passive suspensions by means of the co-simulation using ADAMS and MATLAB. The simulation results demonstrate that the proposed endocrine LQR is superior to LQR, and has advantages of excellent performance and strong adaptability. The proposed control strategy provides not only a new control scheme of active suspension, but also a possible new way for endocrine intelligent control and its applications.
Key words:active suspension; endocrine system; linear quadratic regulator (LQR); intelligent control; vibration control
基金项目:湖南省科技计划项目(2013GK3132);湖南省教育厅科研重点项目(15A112)
收稿日期:2015-04-15修改稿收到日期:2015-05-29
通信作者于德介 男,博士,教授,1957年5月生
中图分类号:TP18;TP273
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.10.008
第一作者 金耀 男,博士,副教授,1972年2月生
猜你喜欢
卷宗(2016年10期)2017-01-21
山东工业技术(2016年23期)2016-12-23
山东工业技术(2016年23期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
计算机教育(2016年10期)2016-12-19
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14