
磁悬浮轴承力
——电流/位移线性化策略研究综述
2016-06-20 01:44胡磊,宗鸣
唐山学院学报 2016年3期
胡 磊,宗 鸣
(沈阳工业大学 电气工程学院,沈阳 110870)
磁悬浮轴承力
——电流/位移线性化策略研究综述
胡磊,宗鸣
(沈阳工业大学 电气工程学院,沈阳 110870)
摘要:分析了磁悬浮轴承电磁力与其电流和转子位移非线性关系产生的原因,结合国内外文献资料,主要从磁轴承偏置磁场以及本质非线性两方面对磁悬浮轴承力与电流及其位移关系线性化策略进行概述。
关键词:磁轴承;线性化;偏置磁场;综述
0引言
磁悬浮轴承是典型的机电一体化产品,由于其具有无接触、无需润滑和无磨损等优点,因此广泛用于真空和洁净环境系统、机械制造工具、医疗设备、透平机械和超导磁轴承等领域[1]。从1937年Kemper申请第一个用于新型交通工具的悬浮支撑专利开始,磁轴承研究成果无论在理论上还是在实验上都有很大的突破。磁轴承不同于传统轴承,它是用永磁体或通电线圈产生的磁场力将转子悬浮于空中,由于磁轴承的磁极以及转子在被磁场磁化的初始时刻是非线性的,且磁轴承的力与其电流以及位移都是二次方的关系,因此,磁轴承的线性化策略和方法一直是磁轴承研究领域的热点和难点。如何使磁轴承的电磁力与其电流和位移关系线性化,对于磁轴承数学模型的建立,乃至对于磁轴承转子精度的控制至关重要。
1非线性化产生的原因
原因一:如图1所示,铁芯磁化曲线在起始阶段是非线性的,该非线性的B-H关系将严重影响磁轴承在小电流时的控制精度[2]。
原因二:磁轴承力与电流的二次方成正比,与其气隙的二次方成反比。在以经典的等效磁路法为主动磁悬浮轴承进行数学建模的情况下,单自由度磁轴承的受力表达式为:

其中μ0为真空磁导率,n为匝数,Aa为磁极面积,i为电流,s为转子气隙。
原因三:其他非线性原因,如磁轴承各自由度上或各磁极对上磁场之间的耦合影响以及磁极的漏磁、气隙不均匀等[3]。
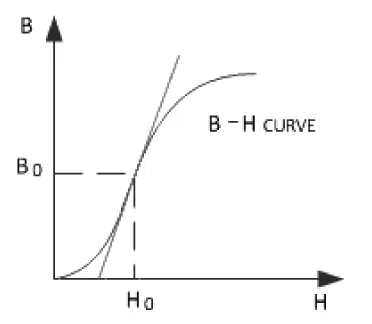
图1 铁芯磁化曲线
2偏置磁场
针对磁轴承的非线性化原因一,即铁芯磁化曲线在其初始阶段的非线性,可以加入偏置磁场,使得磁轴承的稳定工作点位于铁芯磁化曲线线性段的中点。现有的磁轴承偏置磁场的提供主要有外部电流法、恒流源偏置法以及永磁偏置法[4]。本文将以常用的8磁极结构分别对其进行阐述。
2.1外部电流法
文献[5]提出一种如图2所示的偏置磁场供给方法。

图2 外部电流法
图2中i0为外部偏置电流,其大小保持恒定;ix为控制电流,其大小随转子的偏移而不断变化。可以看出恒定的i0流入电磁铁线圈可以产生需要的偏置磁场。
2.2恒流源偏置法
文献[6-7]提出一种如图3所示的使用恒流源产生偏置磁场供给的方法。
在磁轴承的磁极中绕有固定匝数的线圈并外接恒流源,恒流源的接入使得线圈中流过恒定的电流并产生恒定的偏置磁场。磁轴承磁极上再绕上独立于恒流源偏置线圈的控制线圈。

图3 恒流源偏置法
2.3永磁偏置法
文献[8]提出一种如图4所示的使用永磁体产生偏置磁场的方法。

图4 永磁偏置法
相比于之前两种使用电流产生偏置磁场,永磁偏置在磁极定子的磁轭环或者磁极上装有永磁体,在相应的磁极上绕有控制线圈。
2.4三种偏置磁场的比较
通过对三种偏置磁场下磁轴承结构的对比,可以看出由于永磁偏置磁轴承的偏置磁场是用永磁体产生的,因此其结构最为复杂,而且永磁体的存在也使得前期结构组装变得较为困难。但永磁体的存在,也使得绕组结构变得简单,可以让磁轴承变得更加微型和灵活,多适用于真空或航空航天等领域。外部电流法由于没有偏置线圈,因此相比于恒流源偏置磁轴承可以节省铜材料,降低成本,但由于其控制电流是通过外部电路产生并与偏置电流叠加后送入磁轴承线圈,所以其控制方法较为复杂。恒流源偏置磁轴承的优势在于其相比于外部电流法和永磁偏置法,径向上下或左右磁极上的线圈是一体的,因此其只需要使用一半数量的功放电路。而且有研究表明,恒流源偏置磁轴承相较于外部电流法产生偏置磁场的磁轴承以及永磁偏置磁轴承,明显降低了功耗[9]。此外,就国内外磁轴承的研究进展来看,外部电流法磁轴承无论在理论上还是在实验上都较为成熟,成果颇丰。恒流源偏置磁轴承的研究较为冷门,尤其在国内只是近些年才陆续有高校或研究机构开始研究。永磁偏置磁轴承的理论基础还并不完善,其建模理论还不够成熟,但针对不同的应用领域其结构设计上较为灵活,是当前磁轴承研究领域的热点,文献[10]指出,永磁偏置磁轴承是未来研究的主要方向。
3本质非线性的线性化
针对于磁轴承的非线性原因二,即磁轴承力与电流二次方成正比,与其气隙二次方成反比的本质非线性特征,国内外磁轴承领域研究者提出以下线性化方法。
3.1差动绕组法
早在1976年,磁轴承研究领域的领军人物Schweitzer教授就在文献[11]中提出一种如图5所示的经典方法——差动绕组的外部补偿法。
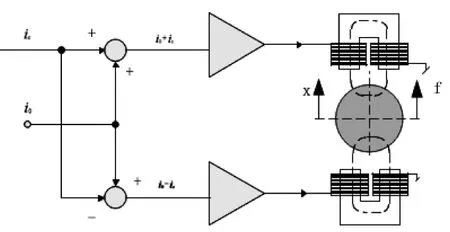
图5 差动绕组外部补偿法
单自由度磁轴承转子在该方法下的合力为:

对上式进行平衡点的泰勒展开并忽略高次项即可得到如下的线性关系式:

3.2变工作点线性化
文献[12]针对经典差动绕组外部补偿法只适合小范围的缺点,提出一种由固定工作点的线性化转变为可变动工作点的线性化,由小范围的线性化转变为大范围的线性化。该方法设计增益调节器且采用自适应控制方法,显著提高了转子控制精度。
3.3全局线性化
如图6所示,文献[13]提出采用在功放电路前进行线性补偿的方法来进行工作点的全局线性化,并分别进行了最小磁通、磁通和不变以及磁通积不变三种方法的试验,证明出磁通和不变具有最好的动态性。

图6 全局线性化法
3.4解析法线性化
文献[14]提出,在永磁偏置磁轴承上用解析法和等效电流法对磁轴承的力与其电流和位移进行线性化,其中等效电流法类似于前文介绍的经典差动绕组法,而解析线性化法更多的是从磁场的角度去考虑。
3.5外部线性化法
如图7所示,文献[15]提出采用求根电路调节力与电流的二次方关系,采用乘法电路调节力与位移的关系。
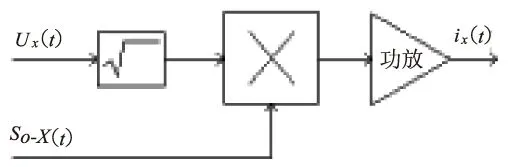
图7 外部线性化法
其控制逻辑为:

3.6状态反馈线性化
文献[16]提出一种使用坐标变换和状态反馈将系统进行大范围线性化的方法。
3.7六种线性化方法的比较
使用差动绕组法对磁轴承力与其电流及其位移的线性化,原理清晰简单,可以很好地结合之前的外部电流法和永磁偏置法。现有的磁轴承控制策略的设计多采用此方法,具有普遍性。但其缺点是只在转子平衡位置时的小范围线性化,当转子受到外力扰动产生较大偏移时,将严重影响磁轴承的控制精度。相较于差动绕组法固定于某一点的局部线性化,变工作点线性化的优势在于其不局限于某一点,而是随着工作点的变化进行局部线性化,但其控制策略的效果取决于控制模型的精度以及不平衡扰动的大小等因素。全局线性化使用线性补偿的方法进行磁轴承工作点的全局线性化,因此其可以用于转子受外力扰动较大的场合。解析法从磁场的角度考虑线性化,为线性化策略多出一条可以考虑的思路,相较于差动绕组法,以磁路进行线性化计算更接近磁轴承电磁力的本质,同样具有普遍性。但其缺点是局限于可以得到气隙处磁感应强度解析式的简单磁路。外部线性化法使用求根电路和乘法电路分别对力与电流的二次方关系和力与位移的关系进行线性化,其思路清晰容易理解,但求根电路和乘法电路的寻找,以及控制逻辑的实现都将提高该策略的复杂度。状态反馈线性化可以实现容错控制且具有鲁棒性,但其涉及到现代控制理论中的状态空间方程,增加了复杂度,而且其理论的提出是基于永磁偏置磁轴承的一侧线圈出现无电流故障非线性增强的情况,因此具有一定的局限性。
4结论
通过对磁悬浮轴承力与其电流及其位移非线性关系产生的原因进行分析,综述了现有的磁轴承电磁力——电流/位移线性化的策略,并对各种线性化方法的优劣以及适用范围进行比较,对于磁轴承研究具有一定的参考价值。
参考文献:
[1]GerhardSchweitzer,EricHMaslen.磁悬浮轴承——理论、设计及旋转机械应用[M].北京:机械工业出版社,2012:3.
[2]宗鸣.永磁偏置混合式磁轴承及其控制方法的研究[D].沈阳:沈阳工业大学,2007.
[3]宗鸣,吴桐,王大朋.高速电机用混合式径向磁轴承前馈解耦控制[J].电工技术学报,2015(14):539-544.
[4]Schweitzer G, Maslen E H. Magnetic bearings: theory, design, and application to rotating machinery[M].USA:Springer,2009.
[5]王金堂.电磁轴承数字控制系统的设计与研究[D].杭州:浙江大学,2005.
[6]Buhler P,Siegwart R. Magnetic bearing with constant-current source[P].US:5682071,1997.
[7]张艳花.恒流源偏置的磁悬浮轴承的研究[D].南京:南京航空航天大学,2008.
[8]Yohji Okada,Hiroaki Koyanayi,Kouichi Kakihara.New concept of miracle magnetic bearings[C].Proc.of the 9th International Symposium on Magnetic Bearings,Lexington,Kentucky,2004:89-95.
[9]徐建根,徐龙祥,纪历.恒流源偏置磁悬浮轴承系统的功耗试验[J].机械设计与研究,2014,29(6):144-147.
[10]赵旭升,邓智泉,王晓琳,等.永磁偏置磁轴承的研究现状及其发展[J].电工技术学报,2009,24(9):9-20.
[11]Schweitzer G, Lange R. Characteristics of a magnetic rotor bearing for active vibration control[C].Conference on vibrations in rotating machinery,Cambridge,1976:C239/76.
[12]魏彤,房建成.磁悬浮控制力矩陀螺磁轴承的变工作点线性化自适应控制方法[J].机械工程学报,2007(6):110-115.
[13]李新生,杨作兴,赵雷,等.磁轴承磨床电主轴全局线性化研究[J].机械工程学报,2002,38(10):122-126.
[14]吴刚,张育林,刘昆,等.永磁电磁轴承磁力的两种线性化方法[J].机械科学与技术,2004,21(3):12-14.
[15]Sivrioglu S, Saigo M, Nonami K.Low power consumption nonlinear control with H∞ Compensator for a Zero-Bias Flywheel AMB System[J].Journal of Vibration & Control,2004,10(8):1151-1166.
[16]魏彤,刘云波.基于反馈线性化和保性能控制的轴向磁轴承单侧线圈故障容错控制[J].光学精密工程,2014,22(3):695-703.
(责任编校:白丽娟)
Maglev Bearing Force: A Review of the Research on Linearization Strategy for Current/Displacement
HU Lei, ZONG Ming
(School of Electrical Engineering, Shenyang University of Technology, ShenYang 110870, China)
Abstract:The authors of this paper analyzes the causes of the nonlinear relationship between the electromagnetic force of the magnetic bearings and their current and rotor displacement and studies the optimization strategies for the linear relationship between the electromagnetic force of the magnetic bearings and its current and rotor displacement from the aspects of the bias magnetic field of magnetic bearings and their intrinsic nonlinearity, based on domestic and foreign literature.Key Words: maglev bearing; linearization; bias magnetic field; review
作者简介:胡磊(1991-),男,安徽合肥人,硕士研究生,主要从事磁悬浮轴承研究。
中图分类号:TM351;O361
文献标志码:A
文章编号:1672-349X(2016)03-0005-04
DOI:10.16160/j.cnki.tsxyxb.2016.03.002
猜你喜欢
话语研究论丛(2022年0期)2022-11-02
中等数学(2020年2期)2020-08-24
电子制作(2019年10期)2019-06-17
电子制作(2019年24期)2019-02-23
NBA特刊(2018年21期)2018-11-24
电子制作(2018年14期)2018-08-21
物理教学探讨(2017年5期)2017-06-10
北京航空航天大学学报(2016年7期)2016-11-16
四川党的建设(2014年9期)2014-08-23
自动化与仪表(2014年10期)2014-02-26
