基于广义最优成像空间的双基地SAR成像算法
2016-06-20 09:16吴宗亮张晓玲
系统工程与电子技术 2016年6期
吴宗亮, 张晓玲, 方 宁
(电子科技大学电子工程学院, 四川 成都 611731)
基于广义最优成像空间的双基地SAR成像算法
吴宗亮, 张晓玲, 方宁
(电子科技大学电子工程学院, 四川 成都 611731)
摘要:传统的基于最优成像空间的双基地合成孔径雷达(synthetic aperture radar, SAR)成像算法是一种性能卓越的SAR成像算法,其具有散射点在成像空间定位准确,算法复杂度低以及聚焦性能高等优点。然而,随着观测场景的扩大,该算法会出现散射点在成像空间定位不准确以及聚焦性能下降的缺点。为了克服这些缺点,在SAR成像领域首次提出了距离历史向量匹配比的概念,基于该概念,又进一步提出了一种新的基于广义最优成像空间的双基地SAR成像算法。所提出的算法不再受限于观测场景的大小,可以对大观测场景(宽测绘带)进行高质量的成像。实验结果表明,所提出的算法是有效的和可行的。
关键词:双基地合成孔径雷达; 观测场景; 最优成像空间; 距离历史向量; 匹配比
0引言
目前,双基地合成孔径雷达[1-3](synthetic aperture radar,SAR)在现实中已经得到了广泛的应用。由于双基地SAR的几何构型比较复杂,因此如何选取合理的成像空间就成了研究双基地SAR成像的首要问题。传统的基于最优成像空间的双基地SAR成像算法(为了行文方便起见,后文统一称为传统算法)首先利用Karhunen-Loeve变换[4-5]成功实现了成像空间的选取。因为该成像空间在最小均方误差[6-7](minimum mean square error,MMSE)的意义下是最优的,所以称为最优成像空间,散射点在最优成像空间可以实现准确定位。然后,传统算法使用二维非均匀快速傅里叶变换[8-9](two-dimensional nonuniform fast Fourier transform,2D-NUFFT)在最优成像空间对散射点进行聚焦。使用2D-NUFFT对散射点进行聚焦时,可以充分利用散射点的全部回波信息[10],因此传统算法能够获得与后向投影[11-12](back projection,BP)算法相当的聚焦效果,同时算法复杂度还要低于BP算法一个数量级[10]。需要说明的是,在目前为数众多的SAR成像算法中,BP算法的聚焦性能与理想情况最为接近。
对于双基地SAR成像而言,传统算法是一种性能卓越的SAR成像算法,其具有散射点在成像空间定位准确,算法复杂度低以及聚焦性能高等优点。传统算法对散射点聚焦的过程本质上是电磁脉冲进行相干积累的过程。随着观测场景的扩大,Karhunen-Loeve变换对于距离历史向量的级数展开效果将会变差,结果导致级数展开时所剩余的残余距离误差的绝对值增大,进而引起传统算法在相干积累过程中得到了正确积累的脉冲数逐渐减少,泄漏的能量越来越多,最终造成聚焦性能下滑。为了克服这些缺点,在SAR成像领域,本文首次提出了距离历史向量匹配比的概念。利用该概念,可以在对观测场景进行成像之前,准确判断出传统算法对观测场景中的散射点的聚焦性能。基于匹配比,本文又进一步提出了一种新的基于广义最优成像空间的双基地SAR成像算法(为了行文方便起见,后文统一称为广义算法)。本文所提出的广义算法不再受限于观测场景的大小,其可以对大观测场景(宽测绘带)进行高质量的成像。
1传统算法简介
1.1最优成像空间
双基地SAR的几何构型如图1所示。在图1中,X-Y-Z表示参考坐标系,其中O为坐标原点;令观测场景为Ω,P表示Ω中的任一散射点;发射机和接收机相对于P的距离历史分别为RT(u;P)和RR(u;P),其中u表示慢时间。那么散射点P的距离历史R(u;P)就可以表示为
(1)
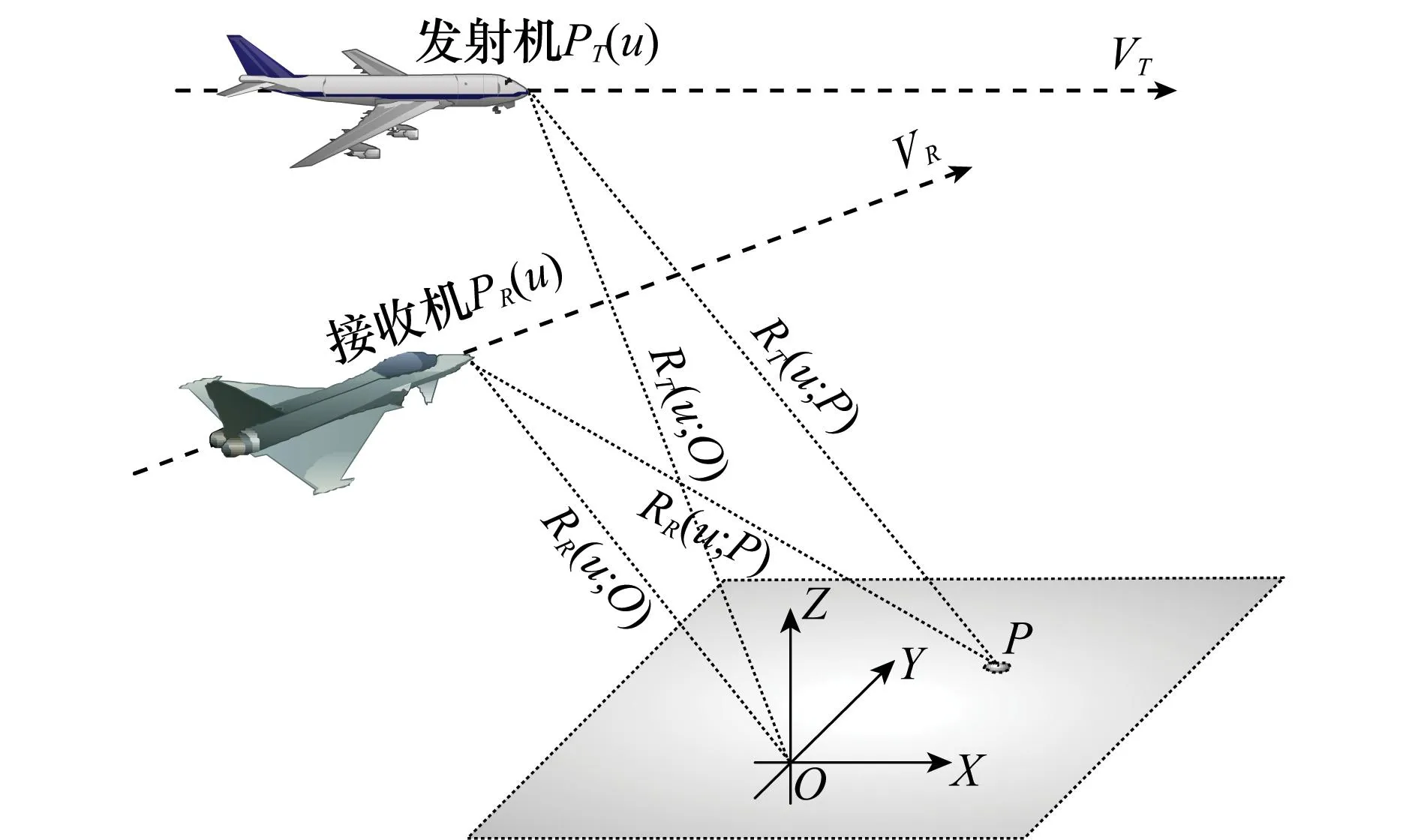
图1 双基地SAR的几何构型
对距离历史R(u;P)在-T/2≤u≤T/2(T表示合成孔径时间)区间中进行均匀采样(采样间隔为雷达发射电磁脉冲的脉冲重复时间)就可以得到P的距离历史向量R(P),表示为
(2)
考虑到R(P)∈RN,因此可以使用Karhunen-Loeve变换对R(P)进行级数展开
(3)
式中,各参数的形式为
(4)
(5)
(6)

(7)
令c1(P)=x,c2(P)=y,同时把式(3)中的向量R(P)、Rref、d1、d2、eR(P)恢复成关于慢时间u的连续函数,并分别表示为R(u;P)、Rref(u)、dx(u)、dy(u)、eR(u;P),那么式(3)就可以转换成如下标量形式:
(8)
式中,Rref(u)称为参考距离历史,其与散射点P无关;eR(u;P)称为残余距离误差。式(8)就是双基地SAR的距离历史在最优成像空间中的完整描述。
1.2传统成像算法
通常情况下,合成孔径雷达所发射的信号为线性调频信号,在双基地SAR的体制下,散射点P的基带回波信号模型为
(9)
式中,t表示快时间;u表示慢时间;T表示合成孔径时间;TP与B分别表示线性调频信号的时宽与带宽;σ(P)表示P的散射强度;fc表示雷达的工作频率;c表示电磁波的速度;rect(·)为矩形窗函数。
对式(9)沿快时间t进行傅里叶变换,并把变换结果在观测场景Ω的区域上对散射点进行积分,就可以获得Ω中的所有散射点在快频率-慢时间域的总的接收回波模型,形式如下:
(10)
式中,f表示快频率(f为快时间t经傅里叶变换得到的频率指标,通常称为快频率)。
将式(8)代入到式(10),经过整理可以得到
(11)
式中,各参数的形式如下:
(12)
(13)
(14)
式中,Sref(f,u)称为参考函数,由参考距离历史Rref(u)产生,其与散射点P无关;Se(f,u;P)由残余距离误差eR(u;P)产生。

(15)
其中,SRFM(f,u)的形式如下:
(16)

(17)
式(17)就是传统算法的数学模型。
2广义算法提出
2.1传统算法的缺陷
如果要求传统算法对观测场景Ω中的所有散射点全部实现精确聚焦,以获取高质量的SAR图像,则必须满足如下约束条件[15]:
(18)
式中,|·|表示标量取绝对值运算;h表示雷达发射电磁波的波长。式(18)表明,在一个合成孔径时间内,当Ω中的每一个散射点的残余距离误差的绝对值均不超过四分之一波长时,传统算法就能够对Ω中的所有散射点全部实现精确聚焦,从而可以获得高质量的SAR图像。如果式(18)的约束条件不满足,那么利用传统算法所获取的SAR图像的图像质量就会下滑,情况严重时,会导致整幅SAR图像中的很多区域得不到正常的聚焦。事实上,在SAR成像中,通常所使用的X波段的电磁波,其四分之一波长的数量级仅为10-3m,因此式(18)的约束条件是比较苛刻的。
(19)
如果把集合T看成是模式识别中的一个类别,那么距离历史向量R(Pj)(1≤j≤M)就转变为来自T类中的一个样本。如果T类中的样本在空间上分布集中,说明T类的类内凝聚力强;反之如果T类中的样本在空间上分布分散,说明T类的类内凝聚力弱。
令R(P)∈T,当使用式(3)对R(P)进行级数展开时,残余距离误差eR(u;P)的绝对值越小,说明展开效果越好。根据Karhunen-Loeve变换,式(3)对R(P)的展开效果取决于T类的类内凝聚力。T类的类内凝聚力越强,那么式(3)对R(P)的展开效果就越好,相应地eR(u;P)的绝对值也就越小。随着T类的类内凝聚力由强变弱,式(3)对R(P)的展开效果会逐渐变差,此时eR(u;P)的绝对值将随之增大,当T类的类内凝聚力减弱到一定程度时,eR(u;P)很有可能就不满足式(18)的约束条件了。既然eR(u;P)都不满足式(18)的约束条件了,那么利用式(3)所获取的散射点P在最优成像空间中的位置坐标就是不准确的,传统算法对P的聚焦效果也会随之下滑。
在SAR成像中,一个观测场景在横轴方向和纵轴方向上,相邻散射点之间的间距往往是固定不变的,基于这个事实,T类的类内凝聚力直接取决于观测场景Ω的大小。随着Ω范围的扩大,T类的类内凝聚力将会减弱,结果导致传统算法的适用性下降。那么如何才能使得传统算法也可以对大观测场景进行高质量的成像,在解决这一问题之前,首先介绍一个新的概念——距离历史向量匹配比(该概念在SAR成像领域首次提出)。
2.2匹配比
为了便于后文描述,下面给出距离误差向量eR(P)的完整形式:
(20)
参见第1.1节,uj(1≤j≤N)为-T/2≤u≤T/2区间中的均匀采样点。式(18)所给出的约束条件是关于慢时间u的连续形式,由式(20)可以得到该约束条件的离散形式:
(21)
令Rkl(P)=Rref+c1(P)·d1+c2(P)·d2,称为逼近距离历史向量,那么式(3)可以改写为如下形式:
(22)
Rkl(P)的完整形式如下:
(23)
由式(2)、式(20)以及式(23)可以得到式(22)的标量形式:
(24)
最终,可以由式(21)和式(24)推导出如下约束条件:
(25)
令向量R(P)-Rkl(P)中满足式(25)的分量的数目为Nα(P),显然R(P)-Rkl(P)中总的分量的数目为N,因此距离历史向量R(P)和逼近距离历史向量Rkl(P)两者之间的匹配比α(P)定义如下:
(26)
因为0≤Nα(P)≤N,所以α(P)的取值范围为α(P)∈[0,1]。匹配比α(P)定义了向量R(P)和向量Rkl(P)之间的匹配程度。α(P)越大,越接近于1,说明R(P)和Rkl(P)之间的匹配程度越高,当α(P)=1时,R(P)和Rkl(P)实现了完全匹配;反之α(P)越小,越接近于0,说明R(P)和Rkl(P)之间的匹配程度越低。
匹配比α(P)的大小取决于式(3)对R(P)的展开效果,展开效果越好,说明Rkl(P)越逼近于R(P),从而α(P)也就越大。参见第2.1节,随着观测场景Ω范围的扩大,T类的类内凝聚力将会减弱,由此造成式(3)对R(P)的展开效果逐渐变差,α(P)也随之变小。匹配比α(P)是衡量传统算法能否对散射点P实现精确聚焦的一个性能参数,其物理意义描述如下。
传统算法对散射点P进行聚焦的过程本质上是电磁脉冲进行相干积累的过程,也就是能量集中的过程,而得到了正确积累的脉冲数取决于R(P)和Rkl(P)之间的匹配程度。因此通过观察α(P)的大小,可以直观地看出得到了正确积累的脉冲数与总的脉冲数之间的比例是多少,即有多少能量得到了集中,而有多少能量被泄漏掉了。当α(P)=1时,R(P)和Rkl(P)实现了完全匹配,此时所有的脉冲均得到了正确的积累,因此能量最为集中,聚焦性能最好。当α(P)由大变小时,R(P)和Rkl(P)之间的匹配程度随之降低,得到了正确积累的脉冲数逐渐在减少,泄漏的能量越来越多,聚焦性能也因此变差。
基于上述分析,利用传统算法对散射点P进行聚焦之前,可以首先计算出匹配比α(P),然后根据α(P)的大小来权衡到底要不要使用传统算法。当然了,α(P)越接近于1越好,最好是α(P)=1。
2.3边界平均匹配比
如果一个观测场景中的每一个散射点的匹配比均等于1,那么传统算法就能够对该观测场景中的所有散射点全部实现精确聚焦,从而可以获得高质量的SAR图像。然而在现实中,一个观测场景所包含的散射点的数目往往是很庞大的,不可能逐一去计算并观察每一个散射点的匹配比。那么如何来衡量传统算法对整个观测场景成像质量的高低,下面给出边界平均匹配比的概念。

(27)
2.4广义成像算法
基于上一节匹配比的概念,本文提出了一种新的基于广义最优成像空间的双基地SAR成像算法,具体描述如下:
步骤 1匹配比的计算。
步骤 2正确分区处理。

在这里需要强调的是,随着观测场景Ω范围的扩大,T类(参见第2.1节)的类内凝聚力将会减弱,此时Karhunen-Loeve变换对Ω中的散射点的距离历史向量的展开效果亦随之变差,结果导致Ω中的散射点的匹配比减小。步骤2中对大场景Ω正确分区的目的就是为了实现每个分区中的所有散射点的匹配比均等于1,以提高聚焦性能。

(28)
(29)
计算出Rref(i)和Ψ(i)以后,类似于式(3),使用Karhunen-Loeve变换可以对分区Ωi中的每一个散射点的距离历史向量进行级数展开。
步骤 3并行成像处理。
如果步骤2中的观测场景Ω的H个分区划分正确,那么使用传统算法对每个分区同时展开并行成像处理。最后把每个分区的成像结果拼接起来,形成一幅完整的对于Ω的SAR图像。
广义算法的优点阐述如下:
(1) 从成像角度,广义算法的本质是传统算法对观测场景的每个分区进行成像处理。通过对大观测场景进行正确的分区,可以实现每个分区中的所有散射点的匹配比均等于1,此时传统算法就能够对每个分区中的所有散射点全部实现精确聚焦,从而达到对大观测场景进行高质量的成像的目的。广义算法把传统算法的适用性推广到了大观测场景,即推广到了一般性。
(2) 传统算法的算法复杂度与观测场景所包含的散射点的数目有关。随着观测场景范围的扩大,其所包含的散射点越来越多,传统算法的执行效率将会下降。广义算法通过对大观测场景的每个分区同时展开并行成像处理,提高了算法的执行效率。
(3) 从信号处理角度,广义算法的本质是2D-NUFFT的并行运算。由于2D-NUFFT算法本身非常规整,因此便于硬件实现。
下面用仿真和成像实验来验证广义算法的正确性和有效性。
3仿真和成像实验
3.1匹配比实验
为了验证本文所提出的广义算法的正确性和有效性,本节试验中,实验平台选取为更一般的移变双基地SAR成像系统,系统仿真参数如表1所示。
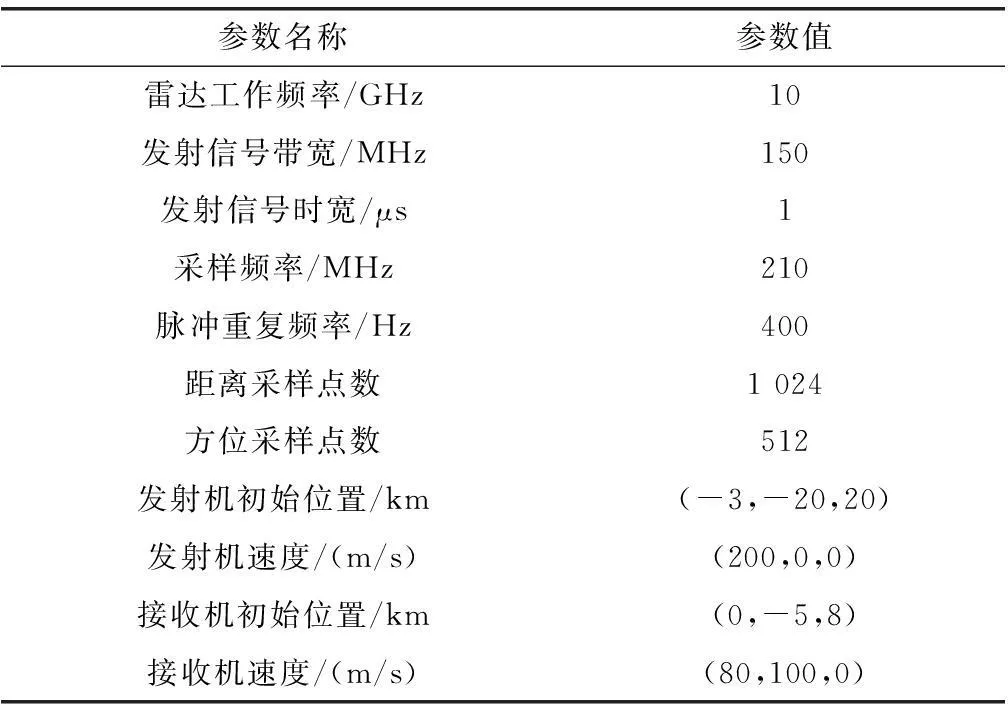
表1 双基地SAR的仿真参数
观测场景Ω及其分区的位置分布如图2所示。Ω为矩形区域,其大小为8 km×8 km,沿X轴和沿Y轴的坐标范围均为[-4 km,4 km];Ω共包含有161×161个散射点,在X轴方向和Y轴方向上,相邻散射点之间的间距均为50 m(由于散射点比较多,所以在图2中没有具体描绘出每个散射点的位置分布);分布在Ω的4个顶点处的散射点分别为P1、P2、P3、P4。

图2 观测场景Ω及其分区的位置分布


图3 分区Ω1的位置分布
根据第2.3节,分别计算出观测场景Ω和分区Ω1的边界平均匹配比,如表2和表3所示。

表2 观测场景Ω的边界平均匹配比

表3 分区Ω1的边界平均匹配比
根据表2,观测场景Ω的边界平均匹配比为0.72,此时如果利用传统算法直接对Ω进行成像,那么Ω中的某些散射点的聚焦性能势必要下滑。根据表3,分区Ω1的边界平均匹配比为1,经过进一步分析,当Ω1的边界平均匹配比为1时,Ω1中的每一个散射点的匹配比均为1。与计算分区Ω1的边界平均匹配比的方法相同,可以计算出分区Ωj(j=2,3,…,16)的边界平均匹配比。经计算,Ωj(j=2,3,…,16)的边界平均匹配比不但为1,而且此时Ωj(j=2,3,…,16)中的每一个散射点的匹配比均为1。
利用边界平均匹配比对观测场景Ω进行正确的分区以后,因为分区Ωj(j=1,2,…,16)中的每一个散射点的匹配比均为1,所以广义算法能够对Ωj(j=1,2,…,16)中的所有散射点全部实现精确聚焦,最终达到了对整个观测场景Ω中的所有散射点全部实现精确聚焦的目的。
比较表2和表3,分区之前散射点P1的匹配比仅为0.16,而经过正确分区以后,P1的匹配比提高到了1。这是因为随着观测场景范围的扩大,式(3)对P1的距离历史向量展开效果变差的缘故。与传统算法相比,广义算法不但可以提高散射点的聚焦性能,而且通过对分区的并行成像处理,还可提高算法的执行效率。
3.2实测数据成像实验
本节中,利用并行BP算法和本文所提出的广义算法对机载双基地SAR的实测数据分别进行成像处理。需要说明的是,在目前为数众多的SAR成像算法中,BP算法的聚焦性能与理想情况最为接近,因此把广义算法的成像结果和并行BP算法的成像结果进行比较,具有很强的说服力。与图2类似,在成像之前,把观测场景划分成四个大小相同的矩形区域。并行BP算法的成像结果如图4所示,广义算法的成像结果如图5所示。

图4 并行BP算法的成像结果
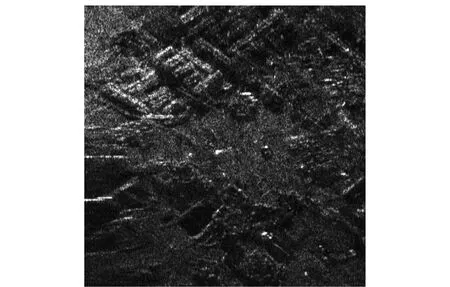
图5 本文广义算法的成像结果
通过对比图4和图5,并行BP算法的成像结果和广义算法的成像结果基本没有差别。下面对算法复杂度进行分析。假设散射点P的SAR图像I(P)的数据点数为N×N,接收回波的采样点数也为N×N,那么并行BP算法的复杂度为O(N3),而广义算法的复杂度为O(N2log2N)。
4结论
与传统单站SAR相比,双基地SAR具有更强的抗干扰能力和抗摧毁能力,并且可以获得更加丰富的目标的散射信息。本文所提出的广义算法把传统算法的适用性推广到了大观测场景(宽测绘带),为双基地SAR的成像处理开辟了一条新的途径。由于广义算法的信号处理本质是2D-NUFFT的并行运算,便于硬件实现,因此广义算法具有高的实用价值。同时,本文所提出的距离历史向量匹配比的思想也可用于其他的双基地SAR成像算法。
参考文献:
[1] Shao Y F, Wang R, Deng Y K, et al. Error analysis of bistatic SAR imaging and stereoscopy bistatic SAR[J].IEEETrans.onGeoscienceandRemoteSensing, 2013, 51(8): 4518-4543.
[2] Li D, Liao G S, Wang W, et al. Extended azimuth nonlinear chirp scaling algorithm for bistatic SAR processing in high-resolution highly squinted mode[J].IEEEGeoscienceandRemoteSensingLetters, 2014, 11(6): 1134-1138.
[3] Wang R, Deng Y K, Zhang Z M, et al. Double-channel bistatic SAR system with space-borne illuminator for 2-D and 3-D SAR remote sensing[J].IEEETrans.onGeoscienceandRemoteSensing, 2013, 51(8): 4496-4507.
[4] Ruiz-Molina J C, Navarro-Moreno J, Oya A. Signal detection using approximate Karhunen-Loeve expansions[J].IEEETrans.onInformationTheory, 2001, 47(4): 1672-1680.
[5] Jogan M, Leonardis A. Karhunen-Loeve expansion of a set of rotated templates[J].IEEETrans.onImageProcessing, 2003, 12(7): 817-825.
[6] Wu Y, Verdu S. MMSE dimension[J].IEEETrans.onInformationTheory, 2011, 57(8): 4857-4879.
[7] Bustin R, Payaro M, Palomar D P, et al. On MMSE crossing properties and implications in parallel vector Gaussian channels[J].IEEETrans.onInformationTheory, 2013, 59(2): 818-844.
[8] Li S Y, Sun H J, Zhu B C, et al. Two-dimensional NUFFT-based algorithm for fast near-field imaging[J].IEEEAntennasandWirelessPropagationLetters, 2010, 9(1): 814-817.
[9] He X Z, Xu H, Liu C C, et al. A new approach to distributed passive radar imaging by 2-D NUFFT[C]∥Proc.oftheInternationalConferenceonSignalProcessing, 2010: 2067-2070.
[10] Wu Z L, Zhang X L, Fang N. Omega-K imaging algorithm for bistatic SAR based on equivalent monostatic model[J].SystemsEngineeringandElectronics, 2014, 36(12): 155-161.(吴宗亮,张晓玲, 方宁. 基于等效单站的双基地SAR波数域成像算法[J].系统工程与电子技术, 2014, 36(12): 155-161.)
[11] Zhang P, Zhang X, Fang G. Comparison of the imaging resolutions of time reversal and back-projection algorithms in EM inverse scattering[J].IEEEGeoscienceandRemoteSensingLetters, 2013 10(6): 357-361.
[12] Zhang L, Li H, Xu Z. A fast BP algorithm with wavenumber spectrum fusion for high-resolution spotlight SAR imaging[J].IEEEGeoscienceandRemoteSensingLetters, 2014,11(9): 1460-1464.
[13] Liao Y, Lin X. Blind image restoration with eigen-face subspace[J].IEEETrans.onImageProcessing, 2005, 14(11): 1766-1772.
[14] Yilmaz O, Akansu A N. Quantization of eigen subspace for sparse representation[J].IEEETrans.onSignalProcessing, 2015, 63(14): 3576-3585.
[15] Cumming I G, Wong F H.Digitalsignalprocessingofsyntheticapertureradardata:algorithmsandimplementation[M].Boston: Artech House, 2004: 567-570.
吴宗亮(1979-),男,博士研究生,主要研究方向为雷达信号处理技术、自适应信号处理、雷达目标识别。
E-mail: nanyuanfeixue@sina.com
张晓玲(1964-),女,教授,博士研究生导师,博士,主要研究方向为雷达信号处理技术、分类与识别、导航定位技术。
E-mail: xlzhang@uestc.edu.cn
方宁(1974-),男,博士研究生,主要研究方向为雷达信号处理技术、图像融合技术、数字波束形成。
E-mail: fn74@163.com
Bistatic SAR imaging algorithm based on generalized optimal imaging space
WU Zong-liang, ZHANG Xiao-ling, FANG Ning
(SchoolofElectronicEngineering,UniversityofElectronicScienceandTechnology,Chengdu611731,China)
Abstract:The bistatic synthetic aperture radar (SAR) imaging algorithm based on traditional optimal imaging space is an excellent SAR imaging algorithm, which has many advantages, such as accurately positioning the scatter point in imaging space, low algorithm complexity, and high focusing performance. However, as the expansion of the observed scene, some defects will appear for the traditional algorithm, such as not being able to accurately position the scatter point in imaging space, and the focusing performance deteriorating. In order to overcome the defects, a concept of the match ratio, which is based on range history vector, is first proposed in the SAR imaging field. According to this concept, a novel bistatic SAR imaging algorithm based on generalized optimal imaging space is further proposed. The proposed algorithm is no longer limited to the range of the observed scene, which can achieve the high-resolution SAR imaging for large range sense (wide swath). The experiment results show that the proposed algorithm is effective and feasible.
Keywords:bistatic synthetic aperture radar (SAR); observed scene; optimal imaging space; range history vector; match ratio
收稿日期:2015-08-02;修回日期:2015-10-26;网络优先出版日期:2016-02-23。
基金项目:航空科学基金(20130180001)资助课题
中图分类号:TN 95
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2016.06.10
作者简介:
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160223.0836.014.html