摄像头型智能车的赛道类型处理
2016-06-21 07:02山东理工大学
电子世界 2016年11期
关键词:摄像头
山东理工大学 孔 岩 董 奥 王 勇
摄像头型智能车的赛道类型处理
山东理工大学 孔 岩 董 奥 王 勇
【摘要】文章主要介绍了以MCU52255芯片为核心控制单元的摄像头型智能车。其利用光电效用理论,通过CMOS摄像头进行路况信息采集,经过对图像数据的滤波、动态阈值计算、二值化、边沿提取等算法对赛道类型进行分类处理;通过舵机打角、编码器测速及双电机差速实现对智能车方向控制和速度控制。本文将从整体设计思路、硬件系统电路设计、信息处理算法设计三个方面进行详述。
【关键词】MCU52255;摄像头;动态阈值;边沿提取;赛道类型
1、设计思路及方案的总体说明
摄像头型智能车利用了光电效用理论,采用CMOS型摄像头采集图像,经过对图像数据的滤波、动态阈值计算[1]、二值化[2]、边缘提取等算法提取赛道中心线,根据对不同路况数据特征的分析并得到不同的赛道类型,并且对赛道类型进行分类处理。
根据智能车系统的基本要求,设计了系统结构图如图1所示。

图1
2、硬件系统设计及实现
硬件电路有电源模块、微控制器核心处理、图像采集、信息显示、车体实时速度采集、转速控制、转向控制、键盘调试八个部分。
2.1 单片机最小系统
采用冷火系列的MCU52255芯片,主板上用到的引脚包括PWM接口、键盘接口、计数器接口、外部中断接口、若干普通IO接口,如图2所示。
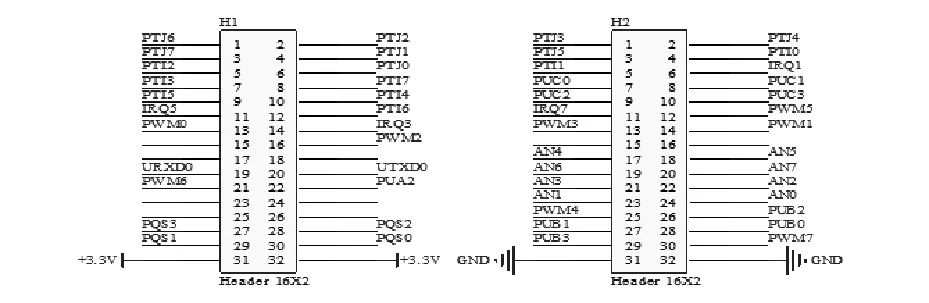
图2
2.2 电源模块
采用TPS7350将7.2V电源电压变为5V供给摄像头、编码器,采用LM7806-ADJ将7.2V电源电压变为6V供给舵机,采用LM1117T将7.2V电源电压变为3.3V供给核心板、OLED。如图3所示。

图3
2.3 电机驱动模块
电机驱动模块采用BTN7960[3],该芯片是应用于电机驱动的大电流半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动Ic。电机驱动模块电路图如图4所示。
3、软件系统设计及实现
3.1 动态阈值的设定及二值化
首先设定一个阈值来分离出白色赛道和底布,当像素点灰度值大于该阈值时为白色赛道,当像素点灰度值小于该阈值时为底布。由于灯光以及底布颜色深浅的不同,阈值也应该进行相应的改变,所以采用动态阈值来提高小车对环境的适应性。阈值提取完成后,对于像素点灰度值小于阈值的像素点全部设定为0,对于像素点灰度值小于阈值的像素点全部设定为1。
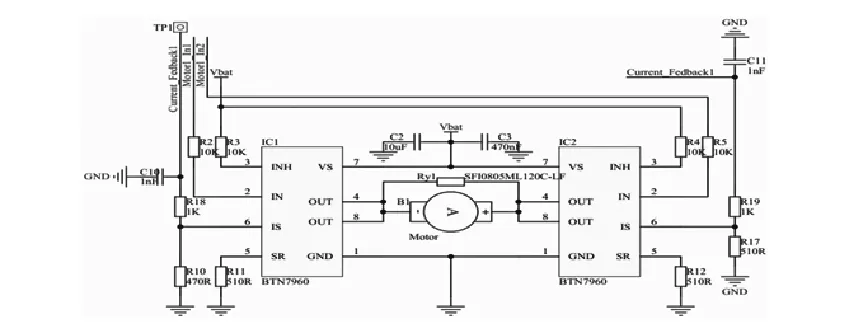
图4
3.2 赛道边沿提取
直接逐行扫描原始图像,提取1与0的跳变点。(1)赛道宽度有一个范围,在确定的赛道宽度范围内提取有效赛道边沿,这样可以滤除不在宽度范围内的干扰。(2)利用赛道的连续性,根据上一行白块的位置和边沿的位置来确定本行的边沿点。(3)求边沿点时,因为近处的图像稳定,远处图像不稳定,所以采用由近及远的办法。
3.3 推算中心点
通过之前提取的赛道边沿数据推算中心,若只有单边有边沿点数据,则通过校正对单边数据按法线平移赛道宽度一半的距离;当能找到与一边能匹配上的另一边沿点时则直接求其中心作为中心点。推算完中心点后,对中心点进行均匀化,方便之后的控制。
3.4 对不合理的中心点进行处理
对于在校正后的图像数据中求得的中心线,反校正到原始图像后存在一行中含有多个中心点的情况。在通常情况下,这种情况出现在较远的视野中,但由于我们增大了视场前部图像的权重,这些中心点对权重的影响极大,导致车模容易出现掉轮甚至冲出赛道的现象。对此,我们利用数学方法求出了中心线的折点,对折点之后的中心点单独处理,使车模不再出现掉轮的现象。
3.5 赛道类型
下面对各种不同类型的道路展开讨论:(1)直道识别:赛道中心线为直线,并且此中心线由视野底部一直延伸到视野顶部。(2)弯道识别:智能车进入弯道后,中心线变成曲线,根据对不同类型弯道的曲率计算对其进行分类。(3)虚线识别:虚线只是小范围间断,所以先找到全部正确的内测边缘,通过差值计算出下一段虚线出现的区域,再链接起来便可以还原出正常赛道。(4)坡道识别:一旦出现坡道,两侧的边线变得外扩,而中线依然是直线,用此特征便可准确识别坡道。 (5)十字处理:在离十字段的线短于某一值时,搜寻远处的线,当发现符合跑道类型的边线时,采用这些线予以控制,从而在十字处取得良好直行效果。
4、结语
本文是基于MCU52255单片机,数字信号基础上讨论的一种摄像头型智能车,涉及电源模块、微控制器核心处理、图像采集、信息显示、车体实时速度采集、转速控制、转向控制、键盘调试,集控制、数模转换、传感技术、汽车电子、机械等多个学科于一身,最终完成对赛道类型的分类处理。
参考文献
[1]涂其远,吴建华,万国金.动态阈值结合全局阈值对图像进行分割[M].南昌大学学报,2002.03.15.
[2]江明,刘辉,黄欢.图像二值化技术的研究[M].软件导刊,2009.04.30.
[3]杨明辉,孙猛猛,张玉炳,万林.BTN7960直流伺服电动机驱动板的设计[M].科技展望,2015.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
消费电子(2022年5期)2022-08-15
汽车工程师(2021年12期)2022-01-18
海外星云(2021年6期)2021-10-14
杂文月刊(2019年2期)2019-06-11
航空模型(2016年11期)2017-05-08
科技资讯(2016年9期)2016-05-14
汽车维修与保养(2015年8期)2015-04-17
网络与信息(2009年6期)2009-07-31
网络与信息(2009年5期)2009-05-29