
水下控制模块对接机构设计及对接试验*
2016-06-23 13:29刘培林曹学伟吴小双王立权
中国海上油气 2016年5期
刘培林 曹学伟 苏 锋 吴小双 周 凯 王立权
(1. 海洋石油工程股份有限公司 天津 300451; 2. 哈尔滨工程大学 黑龙江哈尔滨 150001)
水下控制模块对接机构设计及对接试验*
刘培林1曹学伟2苏 锋1吴小双2周 凯1王立权2
(1. 海洋石油工程股份有限公司 天津 300451; 2. 哈尔滨工程大学 黑龙江哈尔滨 150001)
刘培林,曹学伟,苏锋,等.水下控制模块对接机构设计及对接试验[J].中国海上油气,2016,28(5):110-114.
Liu Peilin,Cao Xuewei,Su Feng,et al.Design and docking tests of a docking mechanism for subsea control modules[J].China Offshore Oil and Gas,2016,28(5):110-114.
基于对水下控制模块对接过程及对接盘主要形式的深入调研,设计了一种新型的水下控制模块对接机构,并对装配精度、对接机构的定位精度进行了分析及计算,确定了零件实际加工的偏差要求。对基于该对接机构设计的水下控制模块样机进行了陆上对接及ROV操作下的锁紧试验,其结果验证了所设计的水下控制模块对接机构的合理性,为今后水下控制模块及类似产品的对接技术研发提供了参考。
水下控制模块;对接机构设计;对接精度分析;样机试验
随着油气开发从陆地逐渐走向海洋,海上采油技术不断突飞猛进[1-2]。海底采油的正常进行须依靠水上控制平台与水下生产控制系统的协调工作来保证。整个水下生产系统的控制核心部件之一就是水下控制模块(SCM),它是根据水上控制指令完成相应的水下监控。水下控制模块的重要性决定了其须具备可回收和重复安装的功能,要实现该功能需要水下控制模块与其安装基座能够在水下进行对接[3-5]。水下控制模块对接是指水下控制模块本体与下对接盘(SCMMB)进行引导对接,采用水下机器人(ROV)作为对接的辅助工具[6]。由于ROV在水下工作范围有限,很难达到像在陆地上人肉眼观测精准对接,因此水下控制模块对接技术一直是整个水下控制模块设计的重点[7-8],且存在如下难点:
1) ROV水下作业是通过人在水上进行操作,控制精度低,并且水下尤其是深水能见度低,也对水面操作员造成影响;
2) 存在海流和波浪影响,造成SCM在对接时难以对正,须采用引导对接套筒;
3) 须在水下实现多路液压接头同时对接,并且液压接头分布不集中。
笔者对水下控制模块的对接过程及对接盘主要形式进行了调研,在此基础上,设计出了一种新型的水下控制模块对接机构,对其定位精度进行了分析,并开展了基于该对接机构设计的水下控制模块样机对接试验,为今后水下控制模块以及类似产品的对接技术研究提供了参考。
1 水下控制模块对接过程及对接盘主要形式
水下控制模块一般安装在水下生产系统的橇体上,其安装基座固定在橇体上,水下控制模块在水下对接过程中安装下放工具内部,由下放工具对其进行保护。下放工具上安有吊装机构及导向机构,先通过水下平台的操作,使下放工具与安装基座完成初步对接;之后,下放工具内的液压驱动系统驱动水下控制模块缓慢向下移动,进而使水下控制模块与安装基座完全对接,如图1所示。虽然下放工具上安装有导向机构,但是其定位精度一般无法满足水下控制模块液压接头在对接过程中所需的精度要求,所以水下控制模块上须具有单独的定位精度较高的定位机构。

图1 水下控制模块(SCM)对接过程
目前,两板对接时常采用“一面两孔”的方式,即1个主定位销和1个副定位销[9]。国外现有的水下控制模块的对接盘均采用板板式对接,对接过程中都是通过在水下控制模块的上对接盘上安装定位销,下对接盘上有与其向对应的定位孔。图2为FMC公司及GE公司的水下控制模块对接盘,可以看出FMC公司的水下控制模块通过对接盘中间及对接盘外侧的2个定位销来完成定位,而GE公司的水下控制模块通过分布在同一圆周上的2个定位销来完成定位。
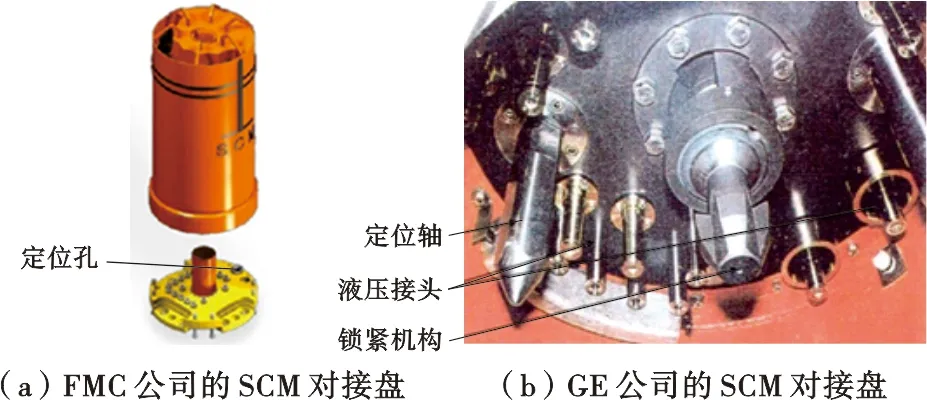
图2 FMC和GE公司的SCM对接盘
但是“一面两孔”的定位方式经常会出现“卡紧别劲”等现象,原因是 “一面两孔”方式会使x轴和y轴方向的自由度受到重复限制而出现过定位,所以在对接过程中对吊装垂直度的要求较高,水下控制模块重心一旦发生偏移,便会出现卡死的现象,不利于对接。因此,国外的水下控制模块都配有专门的下放工具,这在很大程度上避免了对接过程中发生水下控制模块重心偏移的现象。
2 新型水下控制模块对接机构设计及精度分析
2.1 对接盘结构设计
“十二五”期间,海洋石油工程股份有限公司与哈尔滨工程大学联合研制了水下控制模块样机,设计水下控制模块对接盘安装在2 000 m水深的分离器橇体上。由于深水对接成本较高,设计的水下控制模块无法进行深水对接试验,但是其须能够在陆地上且没有SCM下放工具的情况下完成对接,所以对吊装工具的要求也较高。因此,为降低对吊装机构的要求,提出了一种新型对接盘结构,如图3所示。其中,上对接盘直径1 000 mm,厚度40 mm,主要由12个液压母接头、导向销、定位机构组成(图4);下对接盘直径1 000 mm,厚度50 mm,主要由12个液压公接头、导向孔、定位机构及限位机构组成(图5)。导向销主要起引导及粗定位的作用,限位销主要为了避免对接盘过分对接,造成液压接头的损坏。
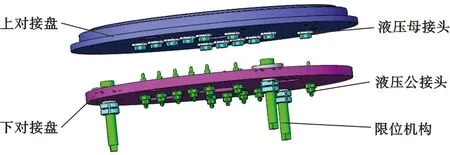
图3 本文设计的SCM对接盘
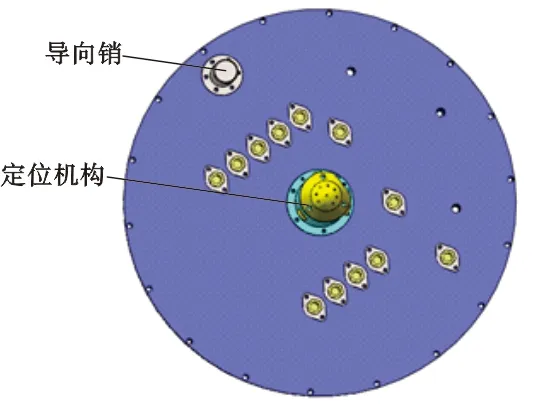
图4 本文设计的SCM上对接盘
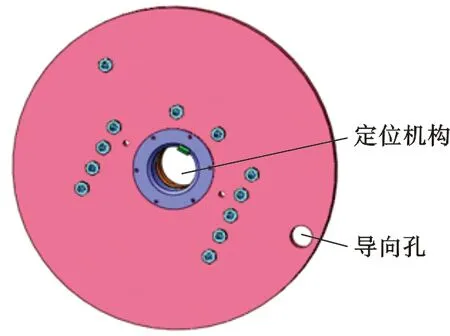
图5 本文设计的SCM下对接盘
设计的水下控制模块对接盘定位机构如图6所示,定位轴限定了x轴和y轴方向的自由度,键槽限定了绕z轴的转动自由度,这样就可以保证每个液压接头能够顺利插入。
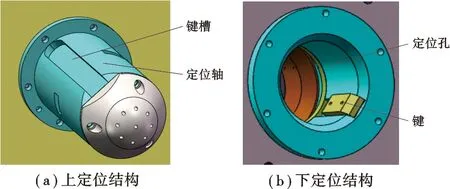
图6 本文设计的SCM对接盘上、下定位结构
2.2 对接精度分析
本文设计的水下控制模块的液压接头为深海板板式对接接头(选用Walther公司的液压接头),其内部设有强力弹簧,在压力落差下密封效果良好,能够有效防止液压油液受到海水污染。该液压接头公接头采用浮动安装,公接头外径34 mm,公差值d9,上偏差-0.08 mm,下偏差-0.142 mm;装配安装孔外径35 mm,公差值H10,上偏差0.1 mm,下偏差0。该液压接头母接头采用固定式安装,加工过程中同时加工上下对接孔的位置,假设加工时都达到公差要求的极限位置,则公接头的中心在离孔中心的最大偏移距离为0.54 mm,即当对应的公母接头的中心偏差小于0.54 mm时,可以精准对接。根据水下控制模块内部液压系统的限制,定位轴与液压接头在对接盘的位置如图7所示。

图7 本文设计的SCM对接盘定位轴与液压接头位置图
对本文设计的水下控制模块对接盘定位误差进行分析,如图8所示,其中A点为定位键位置,B点为某一液压接头的位置。取对接盘的定位轴外径为125 mm,主定位轴与定位键中间的距离按照定位孔的半径来计算,即L=62.5 mm。假定定位轴的中心在设计中心上,因对接盘在加工过程中是将上下对接盘夹紧在一起同时进行加工液压接头安装孔,所以假定相对应的公母接头安装孔的中心完全重合。
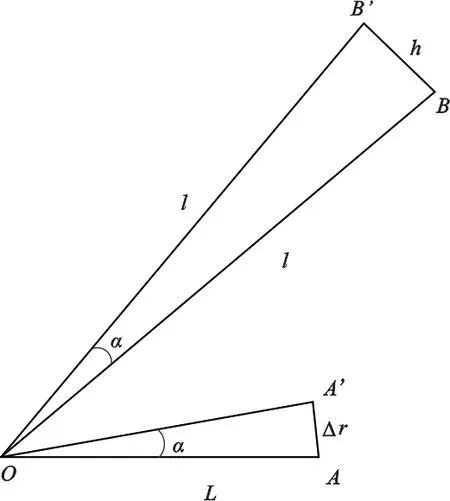
图8 本文设计的SCM对接盘定位误差分析示意图
通过分析公接头的允许最大偏差来分析定位误差。由于键槽与键的加工误差存在,会使对接盘绕其中心O点转动,由于旋转角度非常小,所以在ΔAOA′中有

(1)
式(1)中:Δr为定位键中心绕定位轴中心移动的距离。
当上对接盘在对接时发生转动时,固定安装在其上的母接头也会绕O点发生偏转,在ΔBOB′中有

(2)
式(2)中:h为液压接头孔中心绕定位轴中心移动的距离,l为液压接头孔中心与定位轴中心的距离。
由公式(1)、(2)得
(3)
公母接头能精准对接的要求为h<0.544 mm,将其代入式(3)中可得Δr<33.75/l。对于最远端处的液压接头l=343.84 mm,则Δr<0.098 mm,即定位键中心与键孔中心的最大偏差应小于0.098 mm。因此,进行键及键槽设计时,键的上偏差为0、下偏差为-0.04 mm,键槽的上偏差为0.05 mm、下偏差为0,这样就可以保证键和键槽中心的最大偏差为0.09 mm,即可满足液压接头的对接精度要求。

3 新型水下控制模块对接试验
本文设计的水下控制模块样机如图9所示,样机实际尺寸按照设计尺寸进行加工。在水下控制模块顶部预留有吊装机构及ROV操作机构,对接时下对接盘安装在支架上,利用吊车在顶部吊起水下控制模块,进而完成对接。

图9 本文设计的SCM样机
本文设计的水下控制模块的对接过程如图10所示,键槽的实际尺寸偏差为-0.002 4 mm,定位键的实际尺寸的偏差为0.003 5 mm,在吊装不稳导致水下控制模块发生微小倾斜(小于3°)的情况下依然能够进行对接。
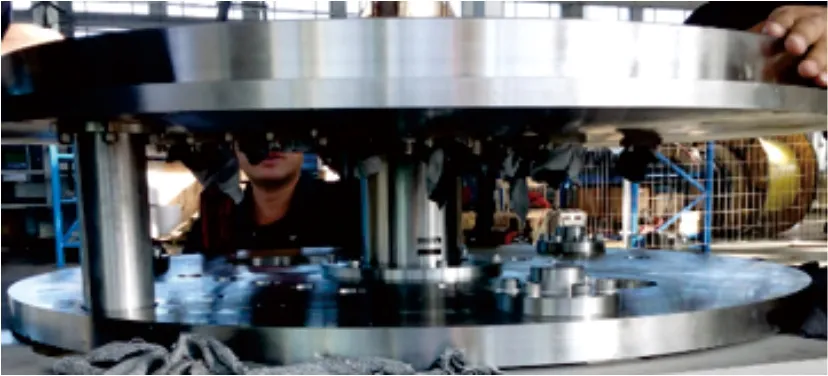
图10 本文设计的SCM样机陆上对接试验
在水下控制模块完成对接后,还须对其进行锁紧,以避免在工作过程中受到外力作用导致对接盘发生分离,从而影响系统的工作。只有在水下控制模块完全对接的情况下,锁紧机构才能进行操作。在完成水下控制模块对接试验后,利用ROV操作工具对水下控制模块进行锁紧(图11),结果表明,水下控制模块能够顺利进行锁紧,说明所设计的水下控制模块对接盘能成功完全对接到位。

图11 本文设计的水下控制模块样机在ROV操作下锁紧
4 结束语
基于对水下控制模块对接过程及主要对接机构的调研,设计出了一种新型的水下控制模块对接机构,并对其定位精度进行了分析,确定了加工过程中的最大公差。对所设计的水下控制模块样机进行了陆上对接及ROV操作下的锁紧试验,结果表明该对接机构在没有水下控制模块下放工具的条件下依然能够顺利进行对接,从而验证了新型水下控制模块对接机构设计的合理性,为今后水下控制模块及类似产品的对接技术研发提供了参考。
[1] 苏斌,冯连勇,王思聪,等.世界海洋石油工业现状和发展趋势[J].中国石油企业,2006(增刊1):138-141.
[2] 曹惠芬.世界深海油气钻采装备发展趋势[J].船舶物资与市场,2005(1):17-20.
[3] 尹丰.水下生产控制系统在气田设计中的应用[J].自动化应用,2012(3):18-20. Yin Feng.Underwater production control system applied in design of gas field[J].Automation Application,2012 (3):18-20
[4] 范亚民.水下生产控制系统的发展[J].石油机械,2012,40(7):45-49. Fan Yamin.Development of underwater production control system[J].China Petroleum Machinery,2012,40(7):45-49
[5] 金向东,林华春.海上油气田水下生产系统的关键设备与技术[J].油气田地面工程,2012,31(4):55-56.
[6] 朱高磊,赵宏林,段梦兰,等.水下采油树控制模块设计要素分析[J].石油矿场机械,2013,42(10):1-6. Zhu Gaolei,Zhao Honglin,Duan Menglan,et al.Design elements analysis of subsea control module for Christmas tree[J].Oil Field Equipment,2013,42(10):1-6
[7] 张丰功,王定亚,李磊,等.水下控制模块的技术分析与发展建议[J].石油机械,2013,41(6):59-62. Zhang Fenggong,Wang Dingya,Li Lei,et al.Technological analysis of underwater SCM and development suggestions[J].China Petroleum Machinery,2013,41(6):59-62
[8] 《海洋石油工程设计指南》编委会.海洋石油工程深水油气田开发技术[M].北京:石油工业出版社,2011:164
[9] 孙千里,沈鑫刚.“一面两孔”定位销实用设计方法与结构[J].机械科学与技术,2010,29(12):1703-1705. Sun Qianli,Shen Xin’gang.A design method for the structure of a one-side-two-hole location pin[J].Mechanical Science and Technology for Aerospace Engineering,2010,29(12):1703-1705.
(编辑:吕欢欢)
Design and docking tests of a docking mechanism for subsea control modules
Liu Peilin1Cao Xuewei2Su Feng1Wu Xiaoshuang2Zhou Kai1Wang Liquan2
(1.OffshoreOilEngineeringCo.,Ltd.,Tianjin300451,China;2.HarbinEngineeringUniversity,Harbin,Heilongjiang150001,China)
Based on in-depth investigations into the docking process of subsea control modules and the docking plate shapes, a new docking mechanism for subsea control modules was designed. The assembly precision and positioning accuracy of the docking mechanism were analyzed and computed to determine the tolerance requirements on part fabrication and machining. Onshore docking tests of the subsea control module prototype, based on the design of the docking mechanism, as well as ROV operation tests, were carried out. The result verifies the feasibility of the docking mechanism designed. The research work here provides a reference for the future design of subsea control modules or similar products.
subsea control module; docking mechanism design; docking precision analysis; prototype testing
刘培林,男,教授级高级工程师,1988年毕业于原石油大学(华东),现从事海洋石油工程研究设计工作。地址:天津市塘沽区丹江路1078号616信箱(邮编:300451)。E-mail:peilin@mail.cooec.com.cn。
1673-1506(2016)05-0110-05
10.11935/j.issn.1673-1506.2016.05.018
TE95
A
2016-04-06 改回日期:2016-06-10
*国家高技术研究发展计划(863计划)“水下分离器关键技术研究(编号:2013AA09A213 )”部分研究成果。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
商界评论(2022年1期)2022-04-13
装备制造技术(2020年4期)2020-12-25
学生天地(2020年6期)2020-08-25
房地产导刊(2020年6期)2020-07-25
大众汽车(2019年1期)2019-11-28
科技与创新(2017年23期)2017-11-30
中国棉花(2017年10期)2017-11-04
表面工程与再制造(2016年5期)2016-12-15
中国新技术新产品(2014年6期)2014-03-25
