
基于STM32的快捷货车电子防滑器设*
2016-06-24 02:38陈启武吴新春
单片机与嵌入式系统应用 2016年6期
关键词:模糊控制
陈启武,吴新春
(西南交通大学 信息科学与技术学院,成都 610031)
陈启武,吴新春
(西南交通大学 信息科学与技术学院,成都 610031)
摘要:针对目前铁路快捷货车制动防滑效率不高的现状,设计了一种以STM32F103为控制核心的电子防滑器。该防滑器通过采集车轴的速度信号来检测车轮的滑行状态,及时控制防滑阀以调整制动缸压力,防止车轮继续打滑。详细介绍了电子防滑器的工作原理以及硬件组成。系统软件采用模糊控制算法,分析了速度测量和滑行控制的判定方法。与传统的机械式防滑控制器相比,提高了速度与防滑判据的运算速度,满足了快捷货车防滑控制的实时性与准确性要求。
关键词:快捷货车;STM32;模糊控制;防滑器;制动
引言
本文提出了一种以STM32F103(以下简称STM32)为防滑控制器、以模糊控制为算法的电子防滑器。
1快捷货车电子防滑器原理
快捷货车电子防滑器与客车防滑器的原理基本一致。货车在制动过程中,防滑控制器通过实时采集4个车轴上速度传感器发出的脉冲信号,计算各轴速度和轮减速度,通过比较轴速获得整车速度,以计算滑移率。再将计算结果与多滑行判据进行比较,一旦检测到某轴发生滑行,即控制该轴防滑电磁阀充放气、调节制动缸压力,防止车轮继续滑行。快捷货车电子防滑器的原理图如图1所示。
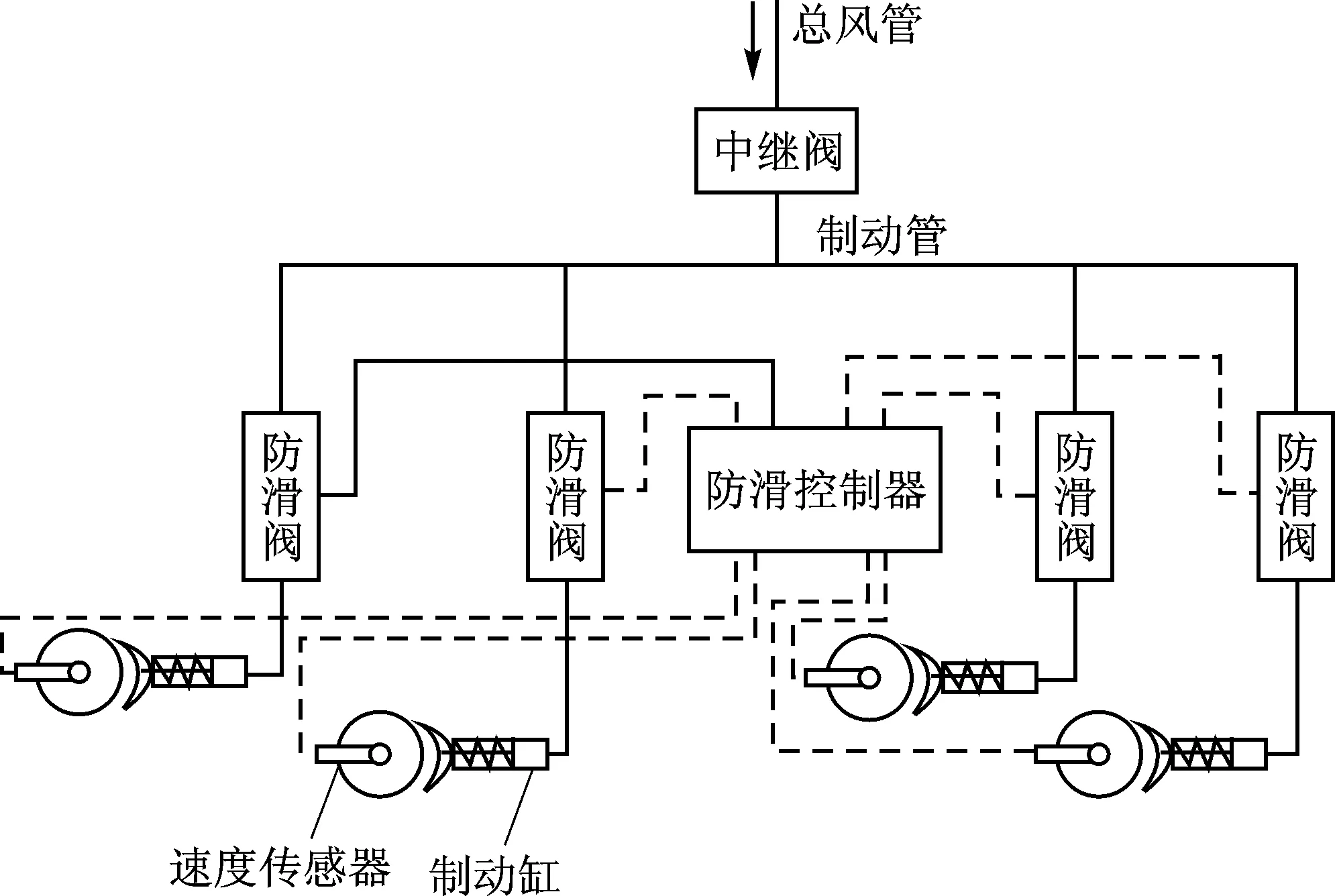
图1 快捷货车电子防滑器原理图
2系统硬件设计
综合快捷货车电子防滑器的功能需求和使用环境等情况,为了减少系统输入、输出与核心控制单元之间的信号干扰,且便于维护,系统硬件采用如图2所示的模块化设计,主要分为电源模块、STM32主控模块、速度信号采集与调理模块、防滑阀驱动模块、故障检测模块以及故障存储与显示模块。

图2 快捷货车电子防滑器硬件总体方案
各部分功能原理如下:
(1) 电源模块
为了使防滑控制器稳定可靠地工作,一个性能优质的电源是十分必要的。防滑控制器的外部电源使用的是车轴动能供电装置[1],该装置内部经过电源管理后可输出48 V的DC,给防滑控制器各个模块供电。由于系统用电元件主要有 DC+12 V 、DC+5 V和 DC+3.3 V 三种不同的供电电压,故需要在主控板上进行DC/DC电压转换电路的设计。本文采用了LM317、MC7805和 ASM1117-3.3三种电源芯片,先由LM317 将 48 V电压转换为12 V,再由MC7805将12 V转换为5 V,最后由ASM1117-3.3将5 V转换为3.3 V。在电源和地之间需配置去耦电容,以消除电源线上引入的高频干扰。
(2) STM32主控模块
为提高防滑器的响应速度和准确性,在主控芯片选型上要求具有较高的运算速度与数据处理能力。本设计方案的主控制器选用的是ST公司推出的基于ARM Cortex-M3内核的32位微控制器STM32F103,利用其通用定时器的捕获/比较通道可捕捉到外部引脚电平的跳变,可方便用于速度信号的测量。此外,完成防滑控制用到的片上资源还包括:SRAM、GPIO、ADC、DMA、外部中断接口、I2C接口和内部看门狗等。
(3) 速度信号采集与调理模块
速度传感器是电子防滑器的输入部分,主要负责采集各组轮正确的转速以提供给防滑器主控单元STM32计算。速度传感器采用霍尔式转速传感器,其输出信号为与转速成正比的方波信号。利用STM32的通用定时器3的通道0~3分别采集4路传感器的速度脉冲信号。由于霍尔式传感器的正常工作电压为12 V,STM32的输入捕获口最高只能承受3.3 V的CMOS电平。选用光路耦合器4N25可实现输入(12 V)、输出(3.3 V)信号的隔离。速度信号采集与调理电路如图3所示。
(4) 防滑阀驱动模块
防滑阀是快捷货车防滑控制的执行部件,防滑阀的动作通过控制两个电磁阀(进气阀和排风阀)来实现。本文选用额定工作电压为12 V的高速电磁阀,选用体积小巧的节能降温器Coil Cool产品系列的CC24060D芯片作为防滑电磁阀的驱动单元。
CC24060D可以在大功率启动电磁阀后,自动将电磁阀的功率降低到最小,即仅满足衔铁保持吸附的所需的最小功率。用于驱动电磁阀的GPIO口与CC24060D芯片之间采用光耦隔离以减小系统干扰,防滑阀驱动电路如图4所示。
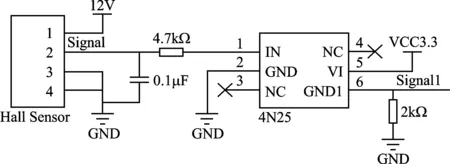
图3 速度信号采集与调理电路
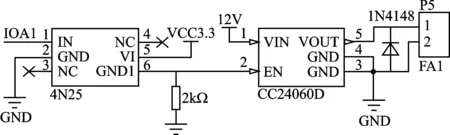
图4 防滑阀驱动电路
(5) 故障检测模块
电子防滑器除了要实现防滑控制外,还应具备完善的故障检测功能,以便在元件工作不正常时釆取必要的防护措施,故障检测电路如图5所示。
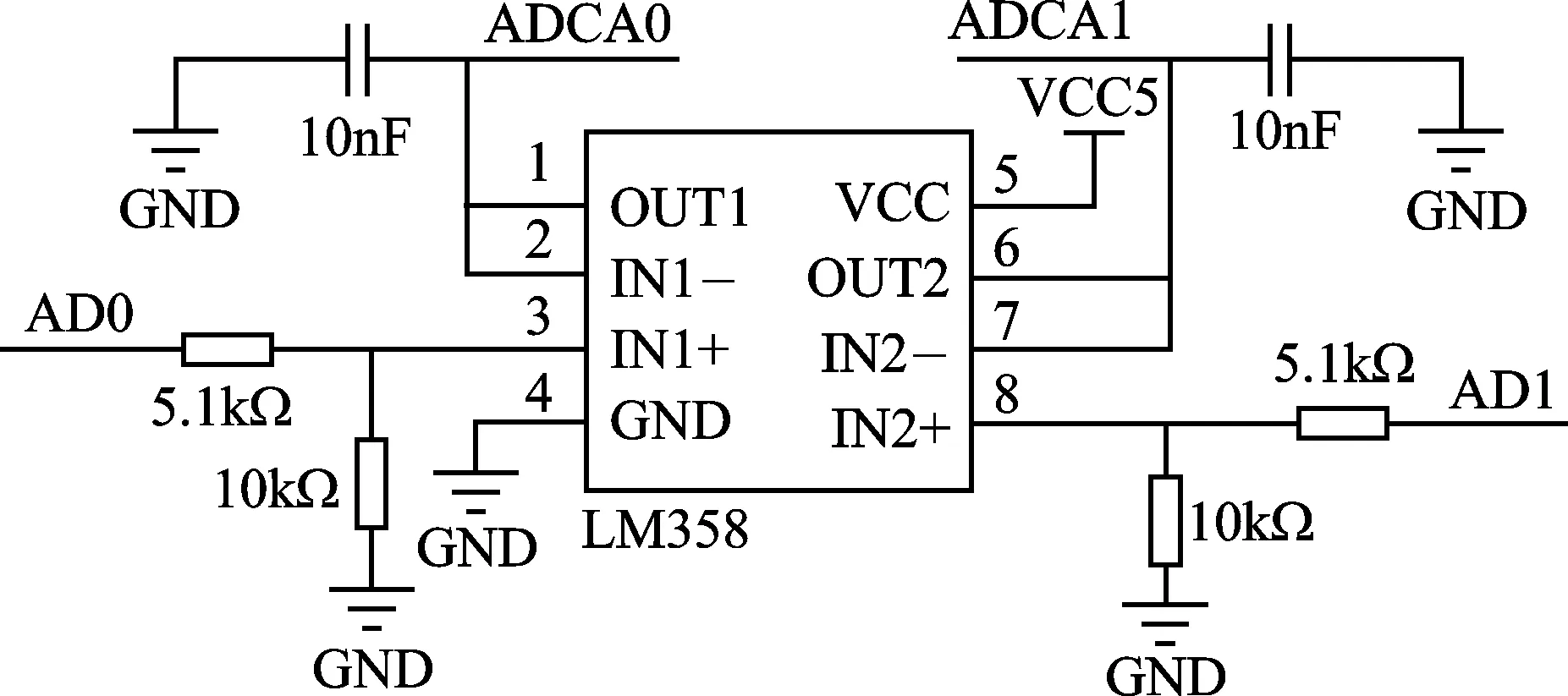
图5 故障检测电路
为节省硬件资源,采用STM32的ADC1的12路通道分别检测防滑器的4个速度传感器和8个防滑电磁阀的工作状态,LM358是一种高增益、内部频率补偿、输出电压摆幅大(0~1.5 V)的双运算放大器,可保证STM32的ADC稳定可靠工作。速度传感器和防滑电磁阀有一个正常工作的电压范围,如果该电压值超出范围,即可认为发生故障。当速度传感器开路时,AD0处电压约12 V,ADCA0输出高电平(约1.5 V);当短路时,AD0处电压约为0 V,ADCA0输出低电平(约为0 V)。防滑阀故障检测同理,这里不再赘述。
(6) 故障存储与显示模块
系统在检测到故障的同时需要将故障码记录并保存下来,以便于停车检修时维护,故障与存储与显示电路如图6所示。本文采用串行CMOS EEPROM芯片AT24C16作为故障码的存储器,其存储容量为16 KB,可进行百万次擦写,该元件通过STM32的I2C总线接口进行读写操作,设计简单、使用方便。为方便查看故障信息,系统还设计了故障显示功能,采用两位共阴极数码管作为显示器,由STM32的GPIO口进行显示控制。此外,利用STM32的3个外部中断引脚设计了按键操控模块,以实现系统自检、故障码显示以及清除的功能。
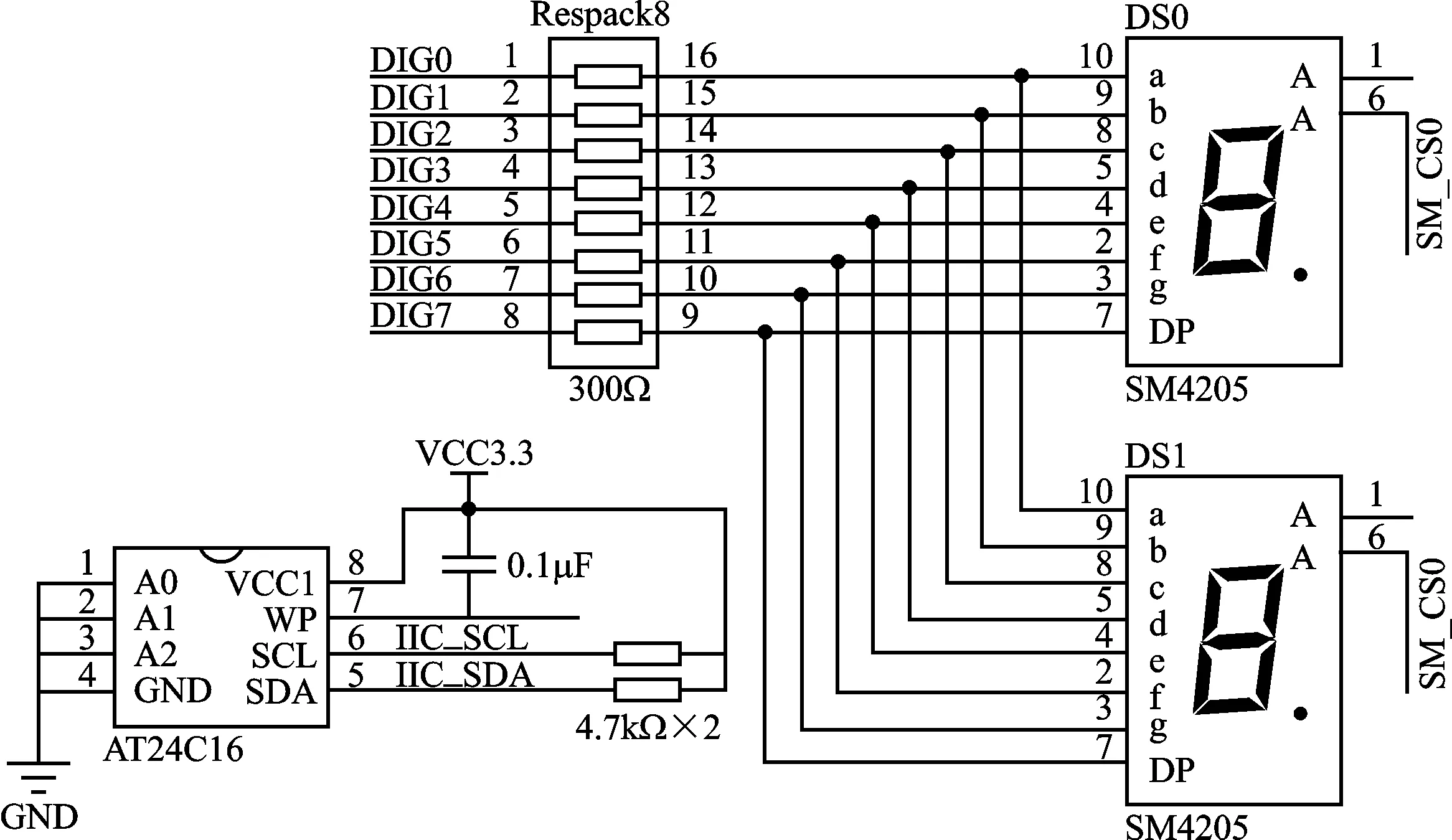
图6 故障存储与显示电路
3系统软件设计
由于防滑控制系统功能比较复杂,采用模块化的程序设计方法,在明确电子防滑器功能原理的情况下,将不同功能的程序进行模块化设计,这样不但可以提高系统的实时性,而且软件结构清晰,易于以后的功能扩展,设计和调试也很方便。系统软件总体框图如图7所示。系统软件主要分为两大部分:第一部分为系统初始化部分,主要包括GPIO初始化、定时器初始化、ADC初始化、控制参数初始化等。第二部分为主控制程序部分,主要包括速度测量与防滑判据计算子程序、防滑控制子程序、故障检测子程序等。整体软件在 Keil MDK环境下采用 C语言编写,采用ST-Link仿真器对程序进行调试与下载。
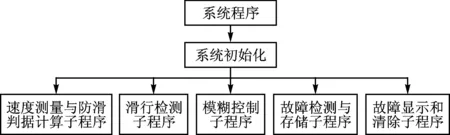
图7 系统软件总体框图
3.1速度测量与防滑判据计算
车轮圆周速度V与车轴速度传感器发出的脉冲信号频率f之间成正比关系,其关系表达式如下所示:
(1)
式中,D为车轮直径,Z为车轮每转产生的脉冲个数。由式(1)可知,只要计算出脉冲信号的频率f,即可获得车轮圆周速度V。快捷货车在制动运行过程中速度变化范围很广(0~160 km/h),为了保证在高、低速情况下都能满足速度脉冲测量较高的精度要求,本文采用变周期M/T法测速,如图8所示。
图8中,T0为程序中设定的测速周期(一般最短为100 ms[5]),由STM32的通用定时器1设定,T0=N0t0。其中,t0为定时器1基准脉冲的计数周期,N0为定时器1预装载计数值。定时器3作为4个轴速捕获单元的时基,计数周期为1 ms。开启定时器的周期中断和捕获中断,在测量中断处理程序中,进行速度和减速度等值的计算。设某个测速时区内第一个速度脉冲捕获时的基准脉冲计数值为N11,最后一个速度脉冲捕获时对应的基准脉冲数为N12, 本次中断捕获到的速度脉冲数为n1,则轮速度V1的计算公式如下所示:
(2)

图8 变周期M/T法测速原理
式中,f0为定时器1基准脉冲的频率(系统时钟频率72 MHz除以分频系数2等于36 MHz)。
同理,在下一个相邻的定时器中断计算出V2:
(3)
则相邻2 个测速时区内速度V1、V2之间的时间间隔Δt为:
(4)
其中, N12=N21, 则减速度α为:
(5)
在测速中断处理程序中计算出4个轴的轮速度和减速度后,取4个轴中轮速度Vi(i=1,2,3,4)的最大值作为整车速度Vref,整车速度与各轮速度的差值即为各轴的速度差ΔVi(i=1,2,3,4),则各轴滑移率λi(i=1,2,3,4)为:
(6)
3.2滑行检测和模糊控制
防滑控制功能任务是软件设计的核心部分,主要实现滑行检测和模糊控制。防滑器在实际控制过程中需要不停地检测每个车轮的运行状态,以判断车轮是否打滑,并控制防滑阀做相应的动作。防滑阀控制制动缸压力的动作是通过电磁阀的励磁来执行的,即控制防滑阀的是开关量。因此需要控制防滑阀动作(正值为充气、负值为排气、0为保压)的时间长短来控制制动缸的压力。设定车轮滑行检测的周期为100 ms,防滑控制周期为10 ms[6-8]。利用STM32的通用定时器3的定时中断,可实现车轮滑行状态的定时检测和防滑阀的定时控制。
为了获得较为理想的防滑控制效果,本文采用模糊控制算法进行防滑控制。首先选取滑移率E和减速度EC为防滑判据,进行二维模糊控制器的设计,并运用MATLAB/Simulink仿真工具搭建快捷货车的制动防滑模型进行仿真验证。仿真结果表明采用模糊控制时,系统的稳定性增强、调节时间短、响应速度快且具有较强的鲁棒性,具体仿真设计工作非本文重点,这里不再展开讨论。
模糊控制程序首先需要对论域设置与定义:滑移率的基本论域为[0,0.26],模糊论域为[0,6],量化因子为KE=6/0.26=23;减速度的基本论域为[-4,4],模糊论域为[-6,6],量化因子为KEC=6/4=1.5,制动缸压力的调整量为最终输出变量,范围设定在[-100%,+100%],模糊论域为[-6,+6],其量化因子为KOP=1/6。滑行检测和模糊控制软件流程图略——编者注。
3.3故障检测与存储
故障检测主要对防滑器的关键部件(如速度传感器和防滑阀的工作状态)进行实时检测。设定故障检测的周期为10 s,利用STM32的通用定时器4的定时中断(计数周期为1 s),可实现系统故障的定时检测。当故障检测周期中断到来时,启动STM32的ADC和DMA功能,利用DMA1的通道1直接将ADC1的外部通道口采集的速度传感器和防滑阀的反馈信号值读入内存,反馈值与储存在内存中的预定值相比较,在预定值范围内说明该附件正常,否则发生故障。如果发生故障则做出相应控制:当检测到某速度传感器发生故障时,用邻轴正常的速度值进行替换;当检测到某防滑阀功能异常时,则屏蔽其控制信号,对应车轴实施一般的正常制动。当速度传感器与排风阀出现故障时,需要通过AT24C16将相应的故障代码保存下来,以便在停车检修的时候通过显示操控模块获取、清除故障信息。故障检测与存储流程图略——编者注。
结语
本文提出了一种以STM32F103为防滑控制器、以模糊控制为算法的快捷货车电子防滑器。在软硬件设计上,采用模块化的设计思想,有效提高了快捷货车防滑控制的实时性和准确性,弥补了以往机械式防滑器在滑行控制动态性能上的不足,对快捷货车制动系统性能的提高具有重要意义。

参考文献
[1] 陈子康. 列车车轮动能发电机:中国,200720081028[P].2007-09-11.
[2] 朱迎春. 国外160km/h快速货车制动系统[J]. 国外铁道车辆,2004(11):109-111.
[3] 李培曙. 我国快速货车上使用防滑器的可行性探讨[J]. 铁道车辆,2002,8(40):15-17.
[4] 金学松. 轮轨蠕滑理论及其试验研究[M]. 成都:西南交通大学出版社,2006:102-113.
[5] 滕晓涛. 基于DSP的快速货车电子防滑器的研究[D]. 成都:西南交通大学,2012.
[6] 姚寿文. 长大货物列车电控空气制动系统及防滑器的智能控制研究[D]. 北京:铁道部科学院,2000.
[7] 罗志芳. 基于模糊滑模控制的机车防滑控制器的研究[D]. 长沙:中南大学,2012.
[8] Wang Shujuan,Zhao Tiebin,Wang Zhiping. Development of synthetical Simulated Experimental System of Railway Electronic Antiskid Devices[J]. Measurement & Control Technology,2004,1(23): 63-65.
[9] 刘军. 例说STM32[M]. 北京:北京航空航天大学出版社,2011.
陈启武(硕士研究生),主要研究方向为快捷货车监测、嵌入式系统;吴新春(讲师),主要研究方向为数字集成电路设计、快捷货车监测。

Chen Qiwu,Wu Xinchun
(School of Information Science and Technology,Southwest Jiaotong University,Chengdu 610031,China)
Abstract:Aiming at the status that the fast railway wagons’skid braking efficiency is not high,a kind of electronic anti-skid device based on STM32F103 is designed.The anti-skid device detects the state of the wheel slide through the acquisition of the wheel speed signal to control the anti-skid brake cylinder and adjust the pressure,so as to avoid the wheel slippage.The working principle and the hardware of the electronic anti-skid device are introduced.The fuzzy control algorithm is used in the software and the method of velocity measurement and glide determination are analyzed.Compared with the traditional mechanical anti-slip controller,the design improves the calculating speed,which satisfies the real-time and precision requirement of anti-slip control of the fast railway wagons.
Key words:fast railway wagon;STM32;fuzzy control;anti-skid device;brake
* 基金项目:2015年铁路总公司科技研究开发计划项目(2015ZB06)。
中图分类号:TP368.1
文献标识码:A
收稿日期:(责任编辑:杨迪娜2015-12-29)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
