
移动服务机器人机械臂结构设计及轻量化的研究
2016-06-27 01:58钱灿荣
成都工业学院学报 2016年2期
钱灿荣
(肇庆学院 电子信息与机电工程学院,广东 肇庆 526061)
移动服务机器人机械臂结构设计及轻量化的研究
钱灿荣*
(肇庆学院电子信息与机电工程学院,广东肇庆526061)
摘要:根据设计参数要求和设计准则,结合人体工程学理论对机械臂的各种构型进行分析,并以全局相对可操作度值为指标求得机械臂的最优构型,使其具有与人体手臂相似的灵活性。采用拓扑优化方法实现机器人机械臂大臂的轻量化,并对拓扑优化前后的结构进行有限元分析,保证了拓扑优化后结构的安全性,使其具有高刚度、轻质量、运动灵活的特点。
关键词:机器人机械臂;人体工程学;结构设计;轻量化
随着科技的进步和机器人技术的发展,机器人与人类的关系越来越密切,进而推动服务机器人技术及相关产业的发展,促使人们进行更深入的研究。服务机器人作业任务主要是依靠其机械臂协作来完成,机械臂的性能对整个服务机器人最终的动态性能有着重要的影响,因此实现服务机器人机械臂结构的合理化设计,特别是实现其结构轻量化、高刚度、宜人化、灵巧化的设计,对提高服务机器人机械臂与人类交互过程中的安全性以及作业的灵巧性都有着重要的意义[1]。本研究为移动服务机器人设计一款高刚度、轻质量、运动平稳且灵活的机械臂。设计过程中针对移动服务机器人的应用场合和特点,基于人体工程学理论综合考虑机械臂构型,对机械臂的结构进行设计,并采用拓扑轻量化对机械臂的结构进行轻量化优化。
1设计参数要求与设计原则
机械臂要求具有高刚度、轻质量、运动灵活且平稳的特点[2],其各项设计指标如表 1 所示。

表1 机械臂的各项设计参数要求
为使机械臂具有较轻的质量、较好的宜人性和运动的灵巧性,根据移动服务机器人的应用场合和特点[3],结合相关设计理论,从功能、结构、人体工程学3个方面提出机械臂结构设计原则,其各项设计原则如表 2 所示。

表2 机械臂的各项设计原则
2基于人体工程学的机械臂结构设计
根据运动形式和运动方向[4],将人体手臂的运动分为屈伸、收展、环旋和平动4种基本形式(如图1所示),任何复杂的运动形式都可以通过这4种基本形式的组合实现。

(a)环悬(b)屈伸(c)展收(d)平动
图1人体手臂的基本运动形式
2.1机械臂构型的确定
常见的人体手臂构型如图 2 所示。

(a)构型1(b)构型2(c)构型3(d)构型4
图2机械臂构型
为评价各种构型机械臂的灵活程度,Yoshikawa[5]提出可操作度的概念,定义可操作度指标为:
(1)
M是对机械臂末端在当前位姿下各个方向运动能力的综合度量,反映了机械臂远离奇异位姿的程度。但它是一个局部性能指标,并不能体现机构在全域工作空间范围内的整体性能。由于M有量纲,为了使评价过程中量纲归一化,特别定义工作空间中任一坐标点pi的全局相对可操作度ui为:
(2)
其中:Mi为坐标点pi的可操作度值;Mmax为机械臂在整个工作空间范围内操作度的最大值。ui值越大,说明机械臂在该点越灵活。
为了更好地比较上述 4 种机械臂构型的灵活程度,利用蒙特卡洛思想[6],在机械臂整个工作空间选取 2 500个随机点,并计算随机选取点处的ui。将ui的取值范围分为0.0≤u<0.2、0.2≤u<0.4、0.4≤u<0.6、0.6≤u<0.8、0.8≤u<1.05 个等级,ui值越大,等级越高;然后统计ui值落在各等级中相应的随机点数。根据现场经验,当ui≥0.6时机械臂的灵活性较好,通过 Matlab 编程,计算可得各机械臂构型的灵活性,其高低对比如图 3 所示。

图3 不同机械臂构型灵活性高低对比
由图3(a)可知,构型 1、构型 2 中随机点数落在等级较高区间的比例很大,而构型 3、构型 4 中随机点主要分布在等级较低的区间。由图 3(b)可知,构型 1 全局可操作性指标ui≥0.6的点数最多,且远远大于其他构型。因此,相对于其他 3种机械臂构型,构型 1 灵活性最好,并且实际上构型 1 也是最符合人体运动结构,最能实现拟人化动作的构型。故选取图 2 中的构型 1 为机械臂最终设计方案。
3机械臂结构拓扑轻量化
随着服务机器人的活动范围增大,与人类的接触更多,需要与人协同来完成工作,因此对轻量化提出了特别的要求。拓扑轻量化可在减轻重量的同时提高机械臂的刚度。拓扑优化[7]的过程一般是将设计区域离散成足够多且足够小的子设计区域,然后按照某种优化策略从子设计区域中删除某些区域,使用保留下来的区域表达结构的最优拓扑。通过变密度法[8]将设计区域的材料的密度视为不定值,在区间[0,1]之间变化,以每个单元的密度作为优化变量,若结构某处材料的单元密度为 1,表明该处的材料应该保留;若结构某处材料的单元密度为 0,则该处材料可删去,以此获得结构材料的最优分布。机器人机械臂拓扑轻量化的流程如图 4 所示。
将 Solidworks 软件建立的大臂三维模型导入Patran 软件中,按照图 5 规划的设计区域和非设计区域对大臂进行切割处理。利用Patran 软件对机械臂大臂进行拓扑轻量化,得到修改后大臂结构模型,如图 6 所示。
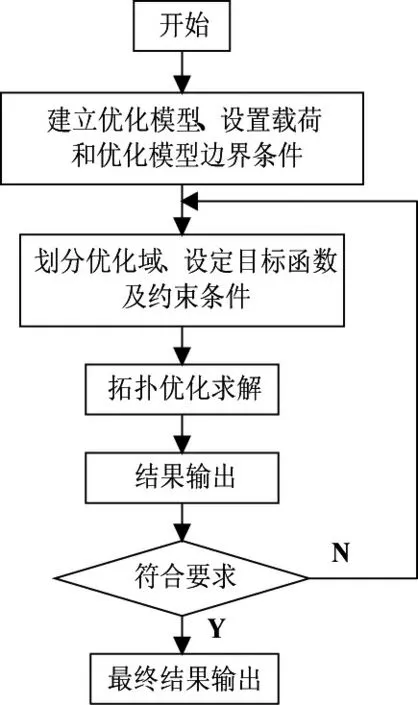
图4 机械臂拓扑轻量化流程图

图5 设计区域划分

图6 大臂拓扑轻量化结构
对大臂拓扑优化之后的结构进行强度校核,以保证其具有足够的安全性。通过建立优化前大臂的有限模型以及拓扑优化后大臂的有限元模型得到大臂拓扑优化前后的应力和位移数值。拓扑优化前后大臂的应力如图 7 所示,拓扑优化前后大臂的位移如图 8 所示。

图7 拓扑优化前后应力云图
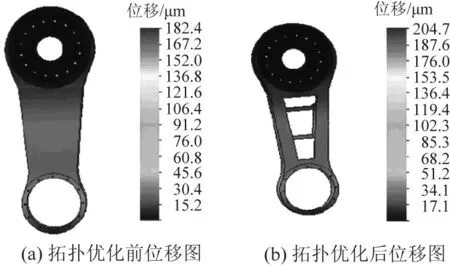
图8 拓扑优化前后位移云图
由图 7 和 8 可知,拓扑优化前大臂的最大应力为34.651 MPa,拓扑优化后大臂的最大应力为35.560 MPa,相对变化不大,且二者都远远小于材料的许用应力,安全系数较大;拓扑优化前大臂的最大位移为 182.4 μm,拓扑优化后大臂最大位移为204.7 μm,相对变化也不大,且在误差允许范围之内。而拓扑优化前大臂的质量为2.098 kg, 拓扑优化后大臂的质量1.802 kg,减少了 13.73%,效果明显。
4结语
本文根据设计参数要求和设计准则结合人体工程学理论对机械臂的各种构型进行分析,并以全局相对可操作度为指标求得机械臂的最优构型。同时拓扑优化实现机械臂的轻量化,并对拓扑优化前后的结构进行有限元分析,保证了拓扑优化后结构的安全性。
参考文献:
[1] TZVETKOVA G V.Robonaut 2:mission, technologies, perspectives[J].Journal of Theoretical & Applied Mechanics,2014,44(1):97-102.
[2] 徐方,张希伟,杜振军.我国家庭服务机器人产业发展现状调研报告[J].机器人技术与应用,2009(2):14-19.
[3] 李宪华.服务机器人双臂协作技术研究及实现[D].上海:上海大学, 2011:1-10.
[4] 李瑞峰,胡雨滨,赵立军,等.基于双目视觉的双臂作业型服务机器人的研制[J].机械设计与制造,2010(4):161-162.
[5] YOSHIKAWA T.Manipulability of robotic mechanisms[J].International Journal of Robotics Research,1985,4(2):3-9.
[6] 郭大宝,梅涛,骆敏舟,等.老人服务机器人机械臂的动力学分析与轻量化设计研究[J].中国机械工程,2012,23(10):1146-1148.
[7] 田野,陈晓鹏,贾东永,等.仿人机器人轻型高刚性手臂设计及运动学分析[J].机器人,2011,33(3):332-339.
[8] 卢小菊,刘英林.浅谈人机工程学在机械设计中的应用[J].机械工程与自动化,2013(3):165-166.
Study on the Structure Design and Light Weight of Mobile Service Robot Manipulator
QIANCanrong*
(School of Electronic Information and Electrical Engineering, Zhaoqing University, Zhaoqing 526061, China)
Abstract:In accordance with the requirements of design parameters and design rules based on theory of human body engineering, a variety of configurations are analyzed. Using a mechanical arm and the global relative operational degree value as an index, the author tries to find the optimal configuration of mechanical arm which is similar to human flexible arm .Topology optimization method is adopted to realize the robot manipulator arm of lightweight, and finite element analysis is carried out on the structure before and after topology optimization to make sure the safety of structure after topology optimization, in order to make it with the characteristics of high stiffness, light quality and flexible movement.
Key words:robot manipulator; human body engineering; structure design; light weight
DOI:10.13542/j.cnki.51-1747/tn.2016.02.007
收稿日期:2016-02-22
作者简介:钱灿荣(1965― ),男(汉族),广东肇庆人,实验师,研究方向:机械设计、金工实习教学、实验室管理,通信作者邮箱:381095759@qq.com。
中图分类号:TP24
文献标志码:A
文章编号:2095-5383(2016)02-0024-03
猜你喜欢
房地产导刊(2022年5期)2022-06-01
精密成形工程(2022年2期)2022-02-22
建材发展导向(2021年13期)2021-07-28
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
艺术科技(2016年9期)2016-11-18
戏剧之家(2016年14期)2016-08-02
专用汽车(2016年1期)2016-03-01
中国房地产业(2016年2期)2016-03-01
科技视界(2016年3期)2016-02-26
