分离器液位控制系统研究
2016-06-30 08:20尹社会刘春茂河南工业职业技术学院河南南阳473000
现代盐化工 2016年2期
刘 斌,尹社会,刘春茂(河南工业职业技术学院,河南 南阳 473000)
分离器液位控制系统研究
刘 斌,尹社会,刘春茂
(河南工业职业技术学院,河南 南阳 473000)
摘 要:本文针对石油化工行业中广泛使用的浮子连杆机构分离器的弊端,介绍了一种液位远端控制系统装置,实现了利用浮子连杆机构和位移传感系统完成计算机远端智能控制,提高了分离器液面控制精度,降低了操作工劳动强度。
关键词:分离器;浮子连杆机构;位移传感器;直线位移;调节器
1 研究背景
在我国油田中各类分离器被大量使用,特别是生产过程储罐类的压力分离器,这类分离器一般对液面测量精度要求不高,主要靠对控制出罐液量来控制罐内液面,其自动液位控制普遍采用浮子连杆机构液面控制器(如图1)来完成。浮子随着储液罐内液面的变化而发生垂直方向上的上下位移,浮子位置的改变通过连杆机构带动液位控制阀的转轴作出相应的转动,从而改变液位控制阀反尔的开度,调节出液量,保持罐内液面的恒定。随着油田的不断发展,这类控制的缺点逐渐显露出来:一是依靠罐内液位产生的浮力来关闭阀们,关阀力量较小,液位控制阀门容易关闭不严;二是凡尔开度受转轴扭矩的局限,可调范围小,作用差;三是液面指示没有明确的数值,工人凭经验操作,不同资历不同经验的工人存在操作差异,影响生产的平稳性;四是不能进行远端智能控制,自动化程度低,需要工人经常现场巡检和操作,劳动强度高。
本文涉及的这种液位控制装置,是一种基于浮子连杆机构的对分离器液位测量和调节的自动控制装置。它克服了一般 的浮子连杆机构液面控制机构只能现场调节,不能显示罐内液面数值和进行远端智能控制的缺点。
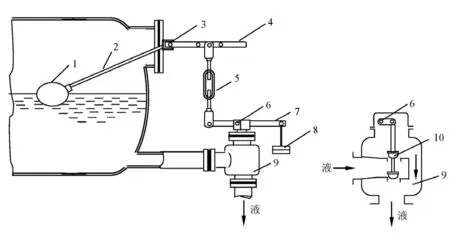
图1 浮子连杆机构液面控制器示意图
2 技术分析
要实现利用浮子连杆机构完成计算机远端智能控制的关键,是如何将浮子连杆机构的上下运动转换成控制系统可识别的电信号。浮子连杆机构的杠杆在运动过程中可以产生角度位移和直线位移,而位移传感器能够将这种变化转换成相应的信号。
位移传感器根据运动方式可分为直线位移传感器和角度位移传感器。浮子连杆机构的杠杆运动既包括了杠杆端点的上下直线位移,也包括了杠杆绕转轴的角度位移。杠杆端点的直线位移距离不但能够指示罐内液面变化,还能通过延长杠杆增大端点上下直线位移距离,杠杆因液面变化而发生的绕轴角度变化却是固定的,无法增大,所以选择直线位移传感器能够得到放大稳定的位移信号。
常用的直线位移传感器种类很多,各有不同特点:电位器式位移传感器,结构简单,输出信号大,使用方便,价格低廉,但是易磨损,高频性能较差;导电塑料位移传感器,平滑性好、分辩力优异耐磨性好、寿命长、动噪声小、可靠性极高、耐化学腐蚀;绕线位移传感器,接触电阻小,精度高,温度系数小,缺点是分辨力差,阻值偏低,高频特性差;金属玻璃铀位移传感器,阻值范围宽,耐热性好,过载能力强,耐潮,耐磨性能好;光电式位移传感器寿命长、可靠性高,缺点是数字信号输出,处理烦琐;磁敏式位移传感器,寿命长、可靠性高,缺点是对工作环境要求较高;金属膜位移传感器,分辨力高、耐高温、温度系数小、动噪声小、平滑性好。
油田采出液处理站的分离器一般安装在室外露天下的自然环境里,通常分离器液面上下变化浮动频率比较低,各涉电部件需要具有防爆外壳,成本不能太高。所以经济适用的拉线式位移传感器是最好的选择,它的内部核心元件是可变电阻器和信号转换电路,模拟信号输出DC4~20mA电流,拉线最大行程可达12500mm,可在-45℃—105℃宽温度环境中使用,制造商可以供应防爆外壳。
3 系统装置研制
3.1 设计构思
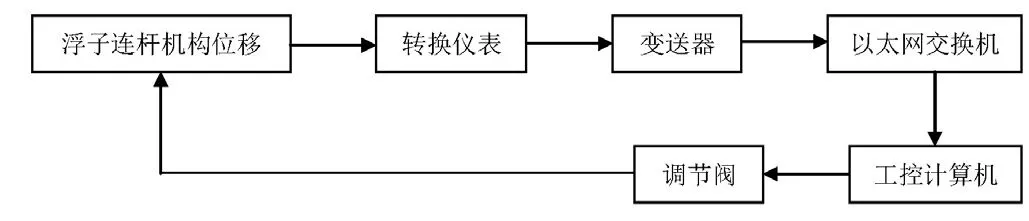
图2 远程智能控制方框图
设计思路参见远程智能控制方框图2,浮子连杆机构可以有效的传递储液罐内液面位置的变化,罐外杠杆上下位移与罐内液面位置变化成一定的比例关系,可以真实反映罐内液面的变化。位移传感器将这种变化转变成电流信号。通过PLC、上位机、执行机构,调节阀即可进行远程液面控制操作和液面数据显示。
3.2浮子连杆机构指示液面位置原理

图3 浮子连杆机构变化示意图
参见图3浮子连杆机构变化示意图,为了保证浮子上下移动时,罐外连杆机构端点有明显的位移变化,需要把浮子连杆机构中的杠杆延长,使位移信号放大,就可以得到明显的位移。通过浮子连杆机构,液面位置的变化h∆可以用加长杆放大位移l∆ 指示,计算可得h∆ 与l∆之间的比例关系。
3.3拉线式位移变送器工作原理

图4 直线位移传感器原理图
拉线式位移变送器能够将杠杆的机械位移转换成可以计量的、成线性比例的电信号。它是通过可调电阻器原件将机械位移转换成与之成线性或任意函数关系的电压或电阻输出,因此可以用来测量振动、位移、速度、加速度和压力等非电参数。图4是电位器式传感器的结构原理示意图,图5是变送器外形示意图。它包括由骨架和金属电阻丝组成的电阻元件和电刷两个基本部分组成。当有机械位移时,电位器的电刷产生位移,而改变了电刷相对于电位参考点的电阻,从而实现了非电量(位移)到电量(电阻值或电压幅值)的转换。当直线位移或角位移发生变化,拉线伸缩,带动内轴旋转,同轴旋转引起电位器的电阻变化,再通过变送器将电阻信号转化为标准的电流或电压信号输出。当杠杆向上位移时,拉动悬挂于加长杆上的拉线,拉线带动变送器传动机构与编码器同步转动;当杠杆向下位移时,传感器内部的自动回旋装置将自动收回拉线,在回收过程中保持张力不变,从而输出一个与拉线移动量成正比例的电信号。使用工作电压DC24V,输出电流DC4~20mA标准电信号。

图5 变送器示意图
3.4 控制传输
a.被控对象:分离器,从传感器(测量变送单元)到执行器之间。
b.被控量:液位,表征被控对象工作状态的物理量。
c.测量变送:拉线式位移变送器,对被控量进行测量并转换成标准信号的装置。
d.调节器:MACS系统,把测定值和设定值进行比较的装置。
e.执行器:气动调节阀,执行调节器的指令进行自动开关阀门调节。
设定好液位设定值之后,MACS主控器通过将现场采集来的液位信号,与设定值进行比较,将计量偏差进行分析,然后将偏差输送到I/O模块,以电流的形式传送到现场调节器,进行相应的动作,偏差越大,调节阀动作的幅度也越大,反之越小。直至现场测量值稳定在设定值附近。可以实现液位设定、调节,上下限设定,报警等操作和显示。
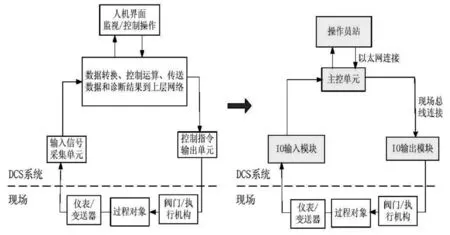
图6 控制调节示意图
4 液位控制系统
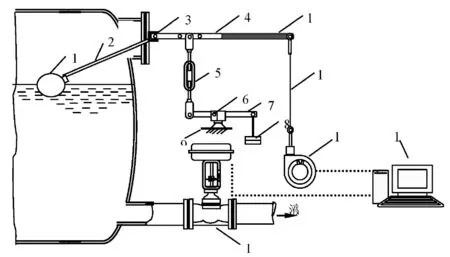
图7 浮子连杆远程智能控制示意图
如图6、图7所示,浮子1与安装在分离器外部的浮子连杆机构相连。浮子连杆机构包括2个具有相同结构的转轴支点和平衡重锤8。在浮子连杆机构杠杆4上还安装液位放大传动杆10,在液位放大传动杆10上连接拉线式位移变送器12,拉线式位移变送器12的电信号引入微型计算机13中。分离器出口管道上还安装有调节阀14。当分离器内液面变化时,浮子1随液面上下浮动,并带动与其相连的浮子连杆机构围绕转轴支点3转动,浮子连杆通过的自动角度与分离器内液面变化量成正比,在浮子连杆机构上的平衡锤8可以调节和平衡浮子的浮力。在浮子连杆机构上安装的液位放大传动杆10带动拉线式位移变送器12内部电路机构动作,使其内部电路产生标准电信号,将该标准电信号远传至微型计算机中,微型计算机通过一定的程序将分离器内液面变化转换信号和设定的参数进行对比分析后输出可执行信号给分离器出口管道上的调节阀14,通过调节阀14的开启程度便实现了分离器内液位的远程自动控制,并可以通过微机显示屏幕进行监视,也可以根据生产需要设定报警液位和液面控制上下限。
5 结语
本文设计了基于浮子连杆机构的远端液位智能控制装置,能够完成分离器运行过程中的液面远端监控和报警,并通过远端计算机对调节阀等执行机构进行自动调节控制,使分离器液面在控制范围内波动。可以在控制室内显示分离器液面数据,降低了工人巡检的频度。该装置具有显示直观,显示调节稳定的特点,有良好的通用性和可控性,经试用效果良好。
[参考文献]
[1] 林德杰.电气测试技术(第3版)[M].北京:机械工业出版社,2008.
[2] 周 陆.油气集输[M].北京:石油工业出版社,1987.
[3] 新编电气工程师实用手册(下册)[M].北京:中国水利水电出版社,2001.
Study on Liquid Level Control System of Separator
Liu Bin ,Yin Shehui,Liu Chunmao
(Henan Polytechnic Institute, Nanyang, 473000,China)
Abstract:In this paper, the disadvantages of float linkage mechanism separator is widely used in petroleum and chemical industries for, introduces the a level remote control system, realizes the float linkage mechanism and a displacement sensing system completes the remote computer intelligent control, improve the accuracy of the separator liquid level control, and reduces the labor intensity of operating workers.
Key words:float separator; linkage mechanism; displacement sensor; linear displacement; regulator
作者简介:刘斌(1982-),男,河南南阳人,硕士,助教;研究方向:自动控制。
猜你喜欢
工业加热(2021年4期)2021-05-12
湖南电力(2021年1期)2021-04-13
天然气与石油(2020年6期)2021-01-04
中国特种设备安全(2019年7期)2019-09-10
中国海洋平台(2019年1期)2019-05-25
自动化仪表(2018年11期)2018-11-21
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年17期)2017-12-18
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27