基于AQWA的沉船打捞作业安全性分析*
2016-06-30 09:50李佳卫高晓圆
武汉理工大学学报(交通科学与工程版) 2016年3期
关键词:起重船
张 明 代 路 甘 进 李佳卫 高晓圆
(武汉九通汽车厂装备研究院1) 武汉 430034) (武汉理工大学交通学院2) 武汉 430063)
基于AQWA的沉船打捞作业安全性分析*
张明1)代路1)甘进2)李佳卫2)高晓圆2)
(武汉九通汽车厂装备研究院1)武汉430034)(武汉理工大学交通学院2)武汉430063)
摘要:打捞工程中,起重船舶在水上安全作业十分重要,尤其是在起吊沉船过程中.两船与锚链,吊缆等在风、浪、流的耦合作用下的运动响应,以及吊缆、生根位置的合理配置是打捞工程的关键影响因素.基于多体水动力学软件AQWA对沉船起吊过程进行了数值仿真,分析了1 000 t全回转起重船在打捞沉船的过程中起重船与沉船的运动响应,提出了一种基于AQWA的沉船打捞作业安全评估方法.
关键词:沉船打捞;起重船;AQWA;运动响应
0引言
随着长江航运的发展和标准化船型进程的推进,通行船舶呈现出吨位大型化,船型结构复杂化的趋势.加上长江干线流速大、易淤积,尤其是三峡库区深水大流速的等复杂打捞环境条件,给沉船打捞工作带来较大难度和挑战[1].长久以来,由于打捞设备,打捞技术,作业环境,打捞人才缺乏等多方面的原因,长江干线沉船打捞一直是一个高风险、粗放式的作业模式,尤其是沉船结构受力计算,船舶姿态监控,复杂打捞环境对沉船打捞的影响分析计算等都是严重依靠打捞人员和潜水员的经验判断,或者边捞边试,或者以几倍的打捞代价参与打捞,难以达到精准计算、快速高效地进行沉船打捞的目的.
AQWA软件在工程中的应用十分广泛,从单一浮体的运动响应到多体耦合运动响应计算都有所研究.它的求解方法基于势流理论[2],首先求解在单位简谐波中,船舶六自由度运动的幅值响应算子RAO,再通过线性系统的分析方法以及频率特性到脉冲响应函数进行傅里叶变换,可以得到船舶在规则或者不规则波下的时域运动响应预报[3].李宇辰等[4]以方形系数为0.7的系列60船为例,利用AQWA 计算得到的船体运动响应合理地反映了系列60船的实际耐波性能,可用于船舶波浪载荷预报.胡毅等[5]应用AQWA-DRIFT和AQWA-LINE 2个模块,研究了大型LNG船码头系泊时,在风、浪、流联合载荷作用下船舶的运动响应,得到了LNG 船码头系泊时整体运动响应及系缆绳所受张力.
本文着眼于对起重船起吊沉船过程中的运动安全性评估,基于AQWA软件对整个过程中船舶的运动响应进行数值分析,分析数据可为吊船打捞沉船技术方案设计提供参考.
1计算流程
本文采用多体水动力学软件AQWA建立1 000 t起重船与沉船的三维模型,模拟打捞工程中起吊沉船的作业过程.主要应用到AQWA-LINE与AQWA-DRIFT 2个模块计算起重船和沉船的运动响应.
在AQWA-LINE模块中,计算频域下的浮体(或潜体)在单位简谐波下的波浪载荷以及运动响应.在该模块采用有限元加边界元的方法,在船壳上划分有限元,在有限元上布置源汇来模拟船壳的物面边界条件,用边界元法求解格林函数得到浮体结构的波浪力,并且可以得到一阶波浪力、二阶漂移力以及物体的附加质量、辐射阻尼等,为后续的计算提供输入参数.
在AQWA-DRIFT模块中,模拟浮体(或潜体)在不规则波中实时的运动响应,可以考虑波频运动以及低周震荡漂移运动,同时在此模块下也能考虑作用在物体上的风和流的作用以及通过悬链线或铰链等方式考虑多个浮体(或潜体)之间的耦合作用,风和流的模拟通过在重心上施加力与力矩来实现,从而实现吊船打捞起吊作业模拟,计算流程见图1.
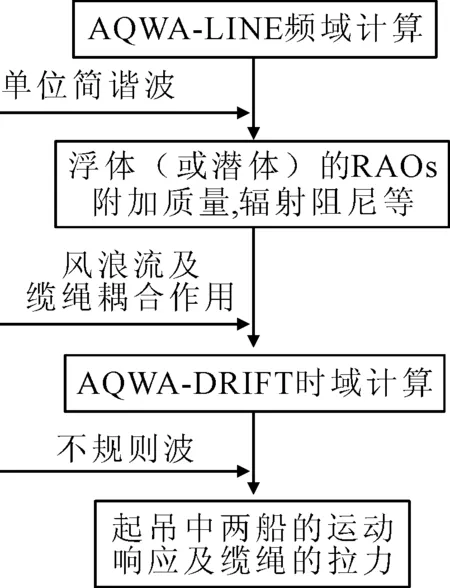
图1 基于AQWA的吊船打捞计算流程
2理论基础
线性势流理论中,对于不可压缩的理想流体,无旋即有势,速度势需要满足以下定解条件.
线性自由面条件:
在浮体的湿表面s(t)上有物面条件:
底部有边界条件:
将总的速度势中分出入射波部分和扰动势φp即
扰动势φp也是简谐的,满足叠加原理,有理由把扰动势分解成7个组成部分,即
式中:φj(j=1,2,…,6)为称为辐射势;φ7为绕射势.
得到了上面所述的三维浮体诸辐射势φj(j=1,2,…,6)和绕射势φ7,用伯努利方程(只保留一阶项)可写出作用于浮体的一阶动压力.即
对其在物面上积分可得流体动力(F1,F2,F3),kN,和动力矩(F4,F5,F6),kN·m.
其中
式中:f0k为入射波的力(矩),f7k为绕射力(矩),这二者之和f0k+f7k是浮体在规则波种受到的波浪激励力(矩),f0k占主要成分,又称为弗劳德-克雷洛夫力(矩),Tkj为浮体做单位速度j态运动时受到的k方向辐射力(矩).
通过速度势的计算不难得到浮体的运动响应微分方程:
式中:Ms为结构质量,Ma为附加质量,B为阻尼系数,K为水静力刚度,F为波浪力.
利用线性系统的分析方法,频率特性和脉冲响应函数互为傅里叶变换,辐射问题的时域解表达形式为:
式中:vj为浮体的j态运动速度.
同样得到绕射势的是与表达形式
式中规定,x=y=0处波面起浮为η(t).
3计算模型
3.1尺度参数
表1为1 000t起重船主尺度,表2为沉船主尺度参数,分别建立2艘船的三维几何模型.起重船吊机选取固定式尾吊最大起重能力,吊高75m.图2为在划分网格后的起重船和沉船运动响应计算模型.
船体上的质量分布对船体在波浪中的运动影响很大,将船体重量的统计值以质量点的形式加在重心位置,也可以分布多个质量点来模拟载荷的分布情况,本文选择第一种加载方式.

表1 起重船主尺度参数

表2 沉船主尺度参数
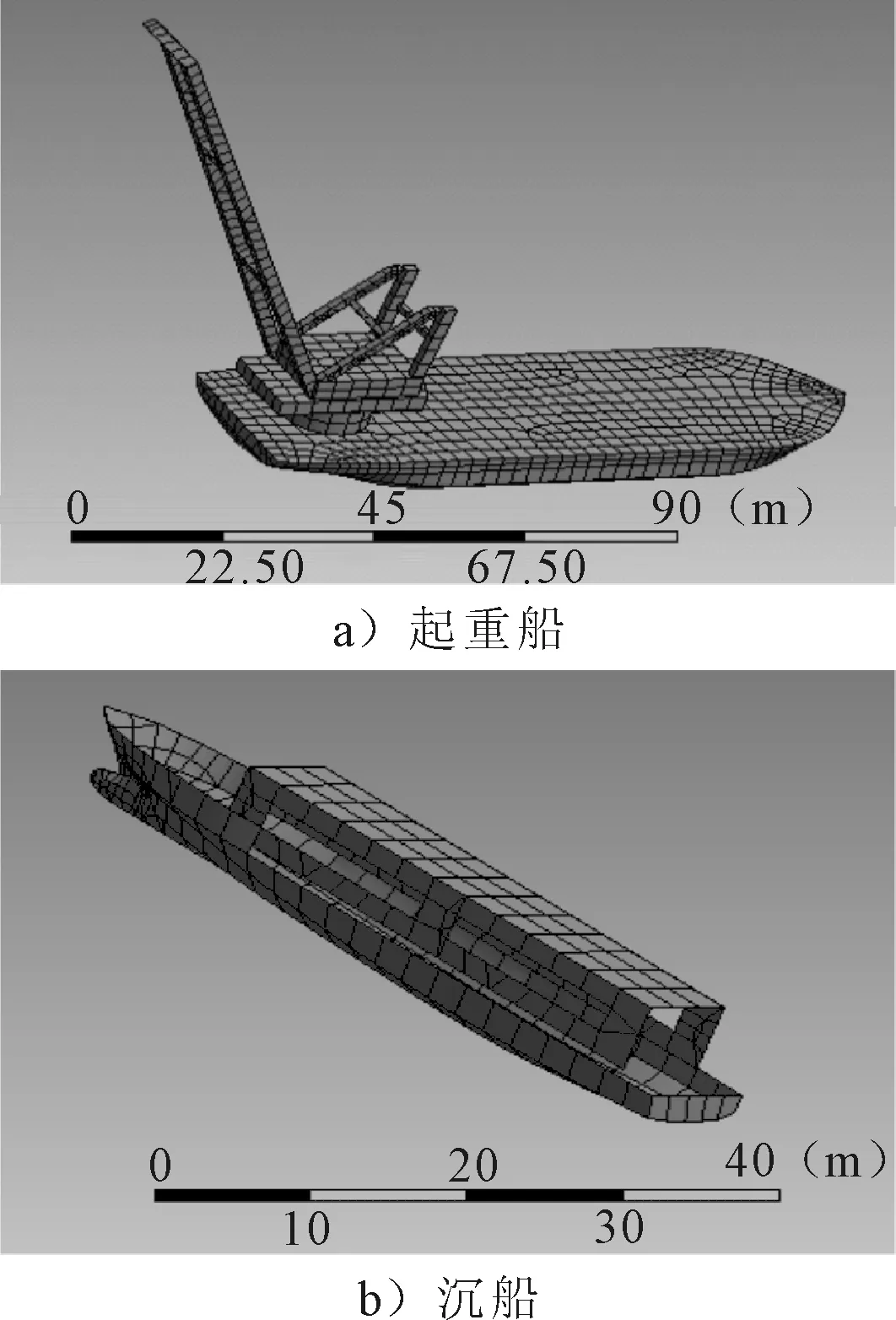
图2 运动响应计算模型
3.2系泊及吊缆布置
1 000 t起重船同时配备有锚泊定位与动力定位系统,以应对三峡库区中大水深的特殊情况,如无法抛锚定位,则采取动力定位.在较浅水深区域作业时可以以锚泊定位为主,辅助以动力定位.本文中计算水深取60 m,不考虑动力定位的作用.图3为起重船锚泊定位布置图.表3为所设置的锚链参数.

图3 起重机系泊布置
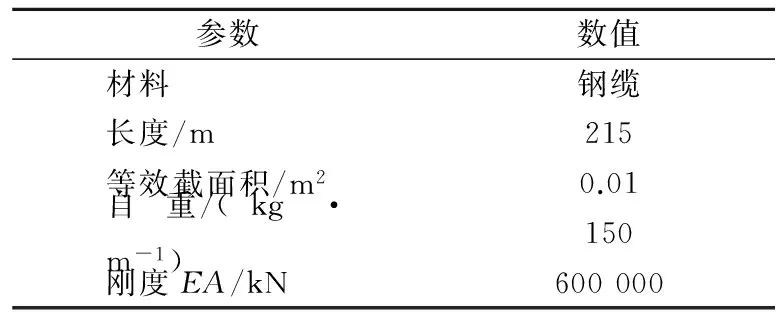
参数数值材料钢缆长度/m215等效截面积/m20.01自重/(kg·m-1)150刚度EA/kN600000
在实际的打捞作业中,沉船的重量重心往往是比较难以获取到的信息,主要由于沉船在水中的情况不明,水下探测的作业难度大,精度差,加上一些船舶不规范的运营或改装,使得可搜集的资料不完全、不准确,使得打捞作业难以开展.沉船重量重心往往也是通过估算获得,精度不高.在进行数值模拟时,可以输入估算的重量重心位置,在计算机中模拟起吊的过程,从而对沉船上的生根位置进行调整.本文中将起重船的起吊挂钩位置垂直置于沉船重心上方.本例中起吊前沉船的状态为正坐于水底,4根吊缆对称布置在重心位置的两侧,见图4.沉船生根位置到吊钩的直线距离为140 m,即吊缆的长度,选择刚度为500 kN·m-1的线弹性绳进行模拟.
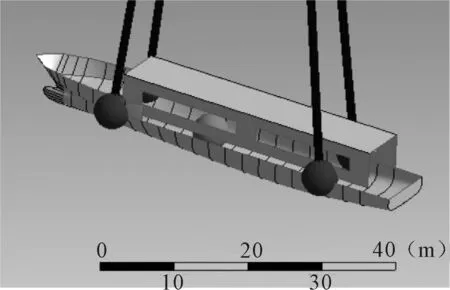
图4 沉船起吊吊缆布置
3.3计算工况及环境参数
本计算所去的风、浪、流等环境载荷参数见表4.其中,选择不规则PM波谱模拟波浪环境,选择的波浪参数偏于危险情况风浪流的方向为180°表示沿船首指向船尾,90°则表示垂直于船长方向作用在船侧,以下工况分别计算风浪流沿纵向作用与横向作用两种情况.
通常情况下被打捞的船只、物品都是沉坐在水底,打捞力除了需要克服其自身水中重量以外,还需要克服泥沙对沉船的吸附力,吸附力的大小和作用点与沉船水中重量、船体与水底泥沙的接触面积、形状、坐沉时间、底质性质等因素有关,十分复杂,无法进行精确计算.在实际工程中往往简化认为吸附力与沉船水中重量成正比,以吸附力系数的形式添加到沉船水中重量中,以此进行打捞力的计算,吸附力系数同时也与水底底质有关.根据调研资料,取吸附力系数10%.
整个打捞起吊过程的模拟分为3个阶段,沉底阶段、起吊阶段、出水阶段.沉底阶段中沉船的水中重量为另两个阶段重量的110%.

表4 环境载荷参数
4计算结果
4.1频域计算
研究表明,不规则的海浪可以简化为无数多个频率、方向和波幅不同的简谐波的叠加,可视为均值为零的正太随机过程.频域分析就是为了计算出浮体在不同频率、方向的单位波高简谐波种的运动响应,根据线性叠加原理,即可计算出在不规则波、各波高中的运动响应.对于本文中的起重船,起吊位置在船尾部,起吊过程的纵摇响应以及在横向外载荷作用下的横摇响应值得着重关注.
图5为各浪向下起重船横摇幅值响应算子,图6为纵摇幅值响应算子.图中,对横摇响应最大的浪向为90°,即波浪垂直于船长方向,在波频为0.137 Hz(圆频率即为0.863 rad/s)时出现峰值,此时根据微幅波理论,此时的水深处于深水情况,易求得此危险工况的波长为82.8m,波浪周期约为7.28 s.
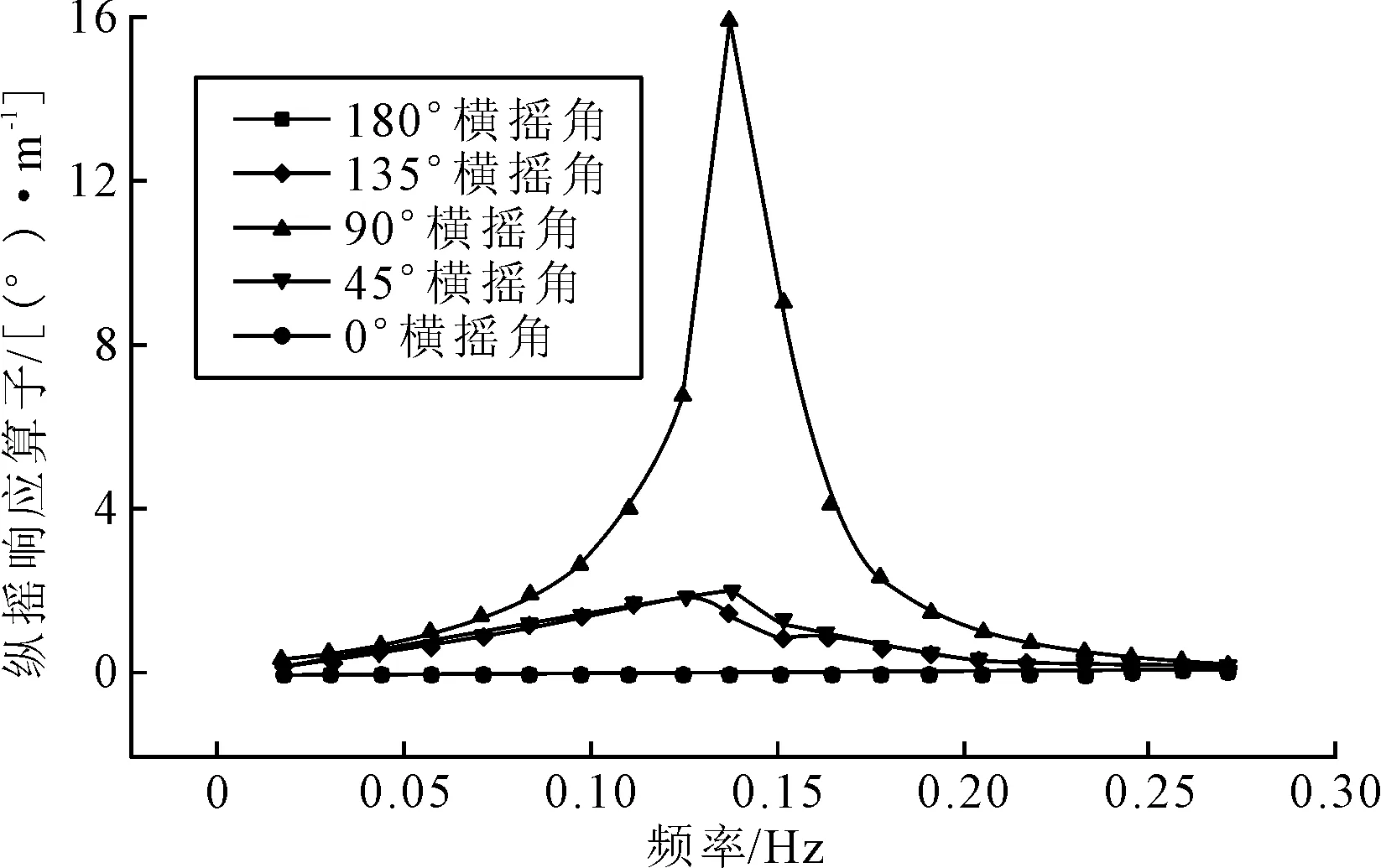
图5 横摇幅值响应算子

图6 纵摇幅值响应算子
而当起重船与来浪呈180°或135°,即迎浪作业与迎浪45°时,纵摇响应最大,根据上式,135°时波频为0.124 Hz(圆频率0.778 rad/s),此时波长为101.8 m,周期为8.07 s.180°时波频为0.097 Hz(圆频率0.609 rad/s),此时波长为166 m,周期为10.32 s.
4.2时域计算
在时域计算中考虑系泊、吊缆、风浪流以及两艘船之间的耦合作用,得到两艘船的六自由度的运动,通过统计运动响应的时程曲线,提取运动响应幅值、频率等信息,对起重船的安全性加以评估.图7为耦合作用下吊船打捞作业时域计算模型.
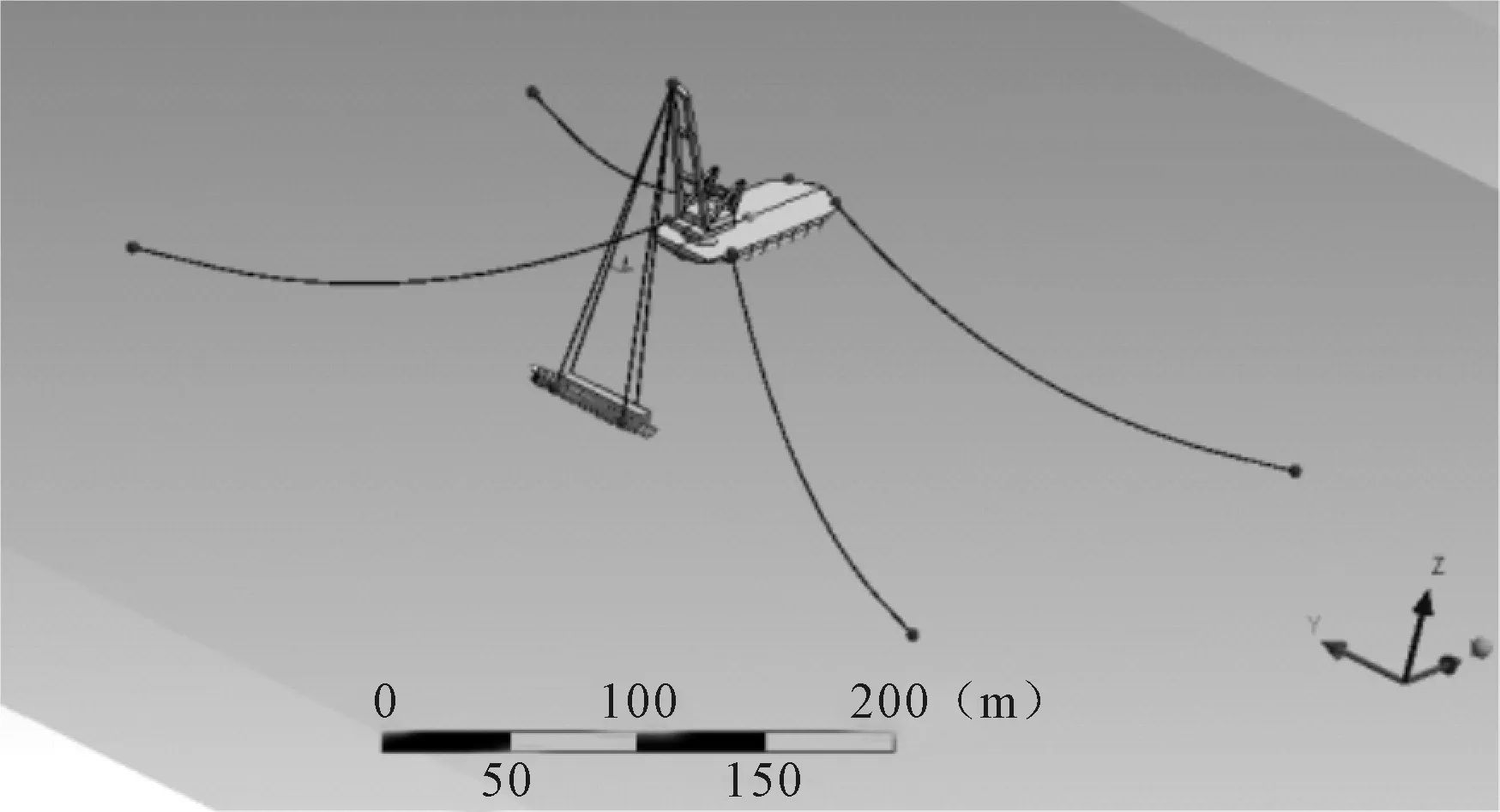
图7 吊船打捞时域计算模型
通过对打捞过程的时域分析,分别得出起重船和沉船的运动响应时程曲线.图8为浪向角180°时沉船在起吊状态下的横摇响应时间历程曲线(此时对沉船为横向载荷).由于起重船尾吊作业,起吊过程中将产生较大幅度的纵摇与纵荡,而当起重船受横向外载荷作用时,横摇运动响应较大,而横荡运动虽受低频二阶慢漂力影响较大[6],但有锚链提供恢复力,不作为考察重点.
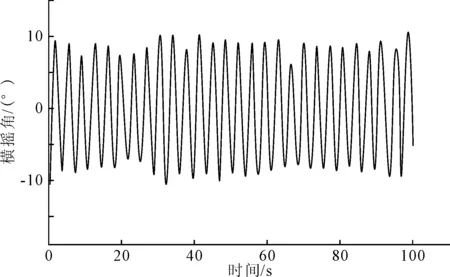
图8 沉船起吊工况下受纵向外载荷的横摇响应时程曲线
将沉船与起重船在三种起吊状态、两种外载荷方向下的垂荡、横摇以及纵摇的时间历程曲线进行汇总,提取运动响应的幅值整理于表5,表6.
通过分析比较沉船与起重船在三种起吊状态、两种外载荷方向下的垂荡、横摇以及纵摇的时间历程曲线及运动响应幅值可知:
1) 在每一个工况下,起重船的横摇响应的极值的绝对值十分相近,也就是说起重船在正浮位置左右横摇震荡,可见挂钩受力位置在起重船中纵线上,没有产生横倾的力矩.而垂荡与纵摇的幅值相差较大,纵摇幅值最为明显,可见尾吊作业导致了起重船产生了较为严重的尾倾,在此尾倾角度附近产生纵摇震荡,尾倾在1°~3°,沉底与出水阶段的尾倾最大,这2个工况为最不利工况,应在打捞过程中予以重视.

表5 起重船运动响应幅值汇总
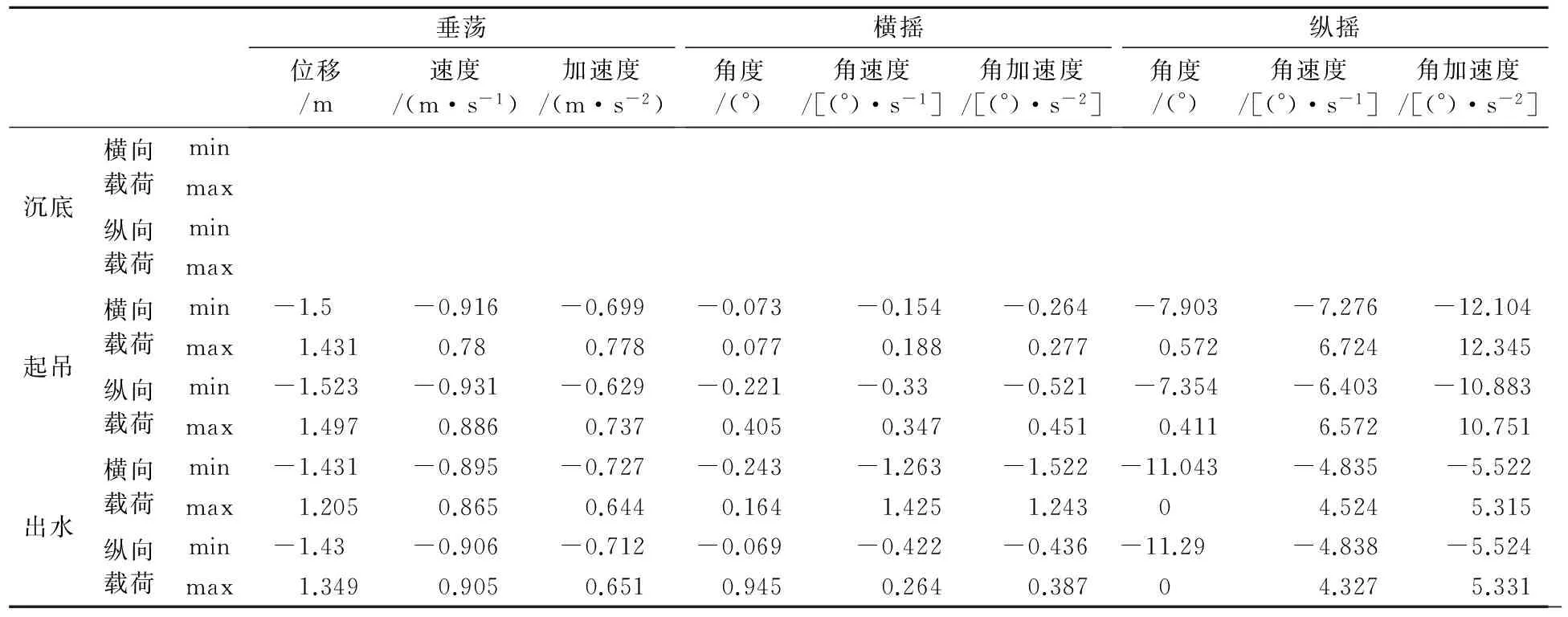
表6 沉船运动响应幅值汇总
2) 起重船与沉船的运动响应均会受外载荷方向的不同而变化,起重船的运动响应明显小于沉船运动响应,说明在实际吊船打捞施工中为保证整个沉船起吊过程的安全性重点之一是采取相应措施控制沉船在打捞过程中的运动响应.
5结 束 语
本文基于AQWA软件对1 000 t全回转起重船尾吊打捞某沉船进行仿真计算,考虑两船与风、浪、流、系缆以及吊缆之间的耦合作用,选取了沉底、起吊、出水3种工况,进行了频域与时域的分析.验证了应用AQWA软件开展沉船吊船打捞计算和分析的可行性,并提出了一套基于AQWA的吊船打捞起重船和沉船运动响应计算方法,可为打捞工程中吊船打捞方案设计和制定提供有利的依据.
参 考 文 献
[1]王兵.长江航道局三峡库区应急抢险打捞起重船建设方案研究[J].中国水运(下半月),2014(1):51-56.
[2]戴仰山,沈进威,宋竞正,船舶波浪载荷[M].北京:国防工业出版社,2007.
[3]戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社,2008.
[4]李宇辰,吴晞,袁小龙,等.耐波性预报的数值方法[J].舰船科学技术,2013(10):67-72.
[5]胡毅,胡紫剑,刘元丹,等.AQWA的大型LNG船码头系泊分析[J].舰船科学技术,2012(3):84-89.
[6]KIM Y. Dynamic analysis of multiple-body floating platforms coupled with mooring lines and risers[D].College Station,TX:Texas A&M University,2003.
Safety Analysis of Shipwreck Salvage Operations Based on AQWA
ZHANG Ming1)DAI Lu1)GAN Jin2)LI Jiawei2)GAO Xiaoyuan2)
(WuhanJiutongCarFactory,EquipmentResearchInstitute,Wuhan430034,China)1)(SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430063,China)2)
Abstract:The security of crane ship is very important n the process of salvage, especially in lifting shipwrecks. The motion response of crane ship, shipwrecks, anchor chains and lifting ropes associated with wind, wave and current and the arrangement of ropes and roots have significant contribution to wreck salvage. The process of a shipwreck salvaged by a 1000 t fully swing crane ship is simulated by using hydrodynamics software AQWA. The motion responses of crane ship and shipwreck are obtained, and a security evaluation method of ship-sunken salvage process is put forward.
Key words:ship-sunken salvage; crane ship; AQWA; motion response
收稿日期:2016-03-12
中图法分类号:U674.35
doi:10.3963/j.issn.2095-3844.2016.03.015
张明(1977- ):男,助理工程师,主要研究领域为工程结构安全可靠性
*中央高校基本科研业务费专项资金资助(2013-IV-069)
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
——吊物系统耦合运动响应的影响
珠江水运(2022年11期)2022-07-01
中国水运(2020年3期)2020-05-26
航海(2019年6期)2019-12-20
教育教学论坛(2018年22期)2018-01-16
珠江水运(2017年5期)2017-04-24
海洋工程装备与技术(2017年5期)2017-03-05
船海工程(2015年4期)2016-01-05
江苏船舶(2013年2期)2013-06-30
船海工程(2013年6期)2013-03-11