基于K60单片机的智能车设计
2016-07-04 15:03杨志清张翠王孙洪庞永业谢金辉
广西教育·C版 2016年5期
杨志清+张翠+王孙洪+庞永业+谢金辉
【摘 要】系统以K60单片机作为核心,以第十届全国大学生“飞思卡尔杯”智能车竞赛C车模作为车体,分别从硬件设计、机械结构改进设计、图像和控制算法方面介绍了智能车的设计过程;采用带有硬件二值化的摄像头进行元素识别,黑线提取和障碍检测;使用闭环PID控制策略对整车进行控制;通过实验验证智能车的稳定性。
【关键词】智能车 摄像头 PID控制 图像检测 障碍检测
【中图分类号】G 【文献标识码】A
【文章编号】0450-9889(2016)05C-0191-02
随着科学技术的发展,智能控制技术在各行各业得到广泛应用,为了培养人才和激发大学生从事研究与探索的兴趣和潜能,“全国大学生智能车竞赛”要求在标准技术平台下完成智能车软硬件系统的设计,且以CCD传感器自动识别赛道路线。通过智能车的软硬件的配合,使智能车完成寻迹检测功能,沿着白色赛道行进。
智能车主要由电源、主控板、舵机、编码器、摄像头和电机等六部分组成。如图1所示。
智能车的工作原理如下:摄像头获取寒道数据,主控板起到总线作用,获得摄像头采集的赛道数据,然后根据赛道信息来控制舵机和电机使小车运动,在运行的同时主控板从编码器中读取小车速度作为反馈数据,处理后送达电机,形成闭环。控制方法如图2所示。
一、智能车的硬件设计
智能车硬件主要由K60最小系统、驱动电路、电源模块组成,对于K60最小系统一般不需要自己制作,使用成品模块即可。
(一)电机驱动电路BTN7960
在电机驱动电路中,一般采用的是由驱动芯片组成的H桥的全桥电路结构,以保证电机对电流的需求。电机位于H桥的中间位置,只需控制两组斜对角的驱动芯片即可实现对电机的正反转,对于电机的转速则可以通过对驱动芯片施加PWM信号实现。由于驱动芯片通过电流较大,可能会产生大量的热能,对电路造成影响,可以给功率管安装散热片,改善它们的工作条件,提高他们的过载能力。另一方面为了避免电机瞬间正转或反转引起的电流反冲导致主控芯片烧毁,在信号输入端需要加光耦隔离芯片保护主控芯片。
电机驱动电路的电源可以直接使用电池两端的电压,最好加上二极管和保险丝以避免电池反接和短接,还可以防止调试过程中不小心短接和误触碰等。智能车在启动的过程中往往会产生很大的瞬态电流,对电路的干扰和单片机的正常工作会有很大影响,可以在电源中增加容值较大的电解电容来保护电路的安全。
(二)电源模块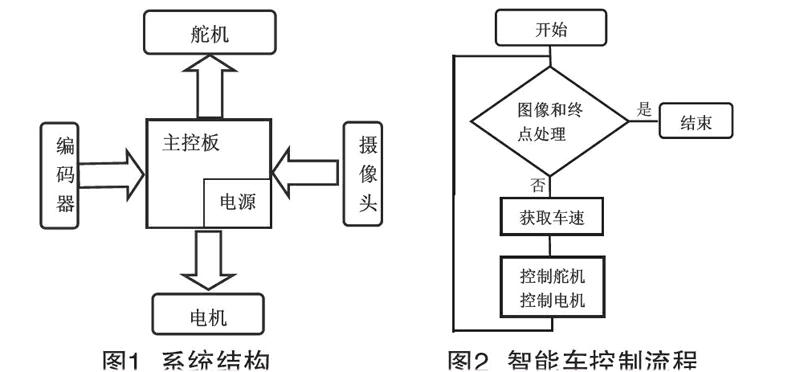
智能车工作电源由7.2V的鎳镉蓄电池供电,由于各个模块工作所需要的工作电压不同,因此需要进行电压转换,转成各个模块所需要的电压。
摄像头模块,K60,OLED显示屏使用的是3.3V供电,该电压由LM2940芯片加REG1117-3.3芯片提供,该芯片自带过压过流保护,两者都可以输出1A的最大电流,而且稳定性高,电压摆幅小,所需外围电路少,电路简单。在温度升高的情况下长时间的工作,输出电压能保持较好的稳定性,非常适宜高频率工作器件。
编码器模块和灯塔接收模块使用的是5V供电,该电压也由LM2940芯片提供,为了避免LM2940芯片过载导致的发热和非线性失真等问题,将3.3V和5V分为两路单独工作,这样可以避免单个模块工作不正常造成的影响。
二、智能车机械结构改进设计
本文中的车模的摄像头组所使用的车模为C型车模,尺寸为28.5×16×8cm,为了提高车模整体的精度,减轻车身重量,最大程度优化小车的机械结构,我们在规则的约束内对小车做了如下的改进设计。
(一)前轮定向
转向轮的定位主要由主销内倾(角)、主销后倾(角)、前轮外倾(角)和前轮前束四个因素决定,它们反映了转向轮、主销和前轴等三者在车架上的位置关系,对于主销内倾(角),主要作用是产生与转向相反的力矩,让车转弯后的回正性增强,同时在转弯时车轮与地面的接触情况会更好。对于主销后倾(角),主要作用是在高速行驶时,保持直线行驶的稳定性,有助于“自动回正”。出于对回正能力、车轮受力面积和灵活性的角度分析检验,我们把前轮调整为主销内倾。
(二)舵机的安装
前轮转向舵机有立式和卧式两种安装方案(这里以舵机转轴为参考对象,立式:转轴处于水平方向。卧式:转轴处于竖直方向)。
舵机立式安装方式的优点:转向响应速度快,转向角较为符合阿克曼转向原理,它由舵机臂竖直平面的运动转化为拉杆水平方向的运动,减少了在同一平面上运动的死区。方便安装舵机臂,有利于调节赛车转向的中心值。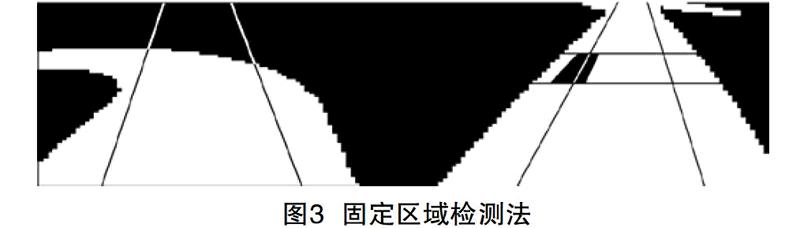
舵机立式安装方式的缺点:不好安装固定;安装后较高,占用竖直方向的空间;重心较高。
舵机卧式安装方式的优点:转向响应速度较快;高度较低;重心低。
舵机卧式安装方式的缺点:转向角部分符合阿克曼转向原理(转角小时),舵机臂和拉杆都在水平平面内运动,当舵机臂长度与转角臂长度相等时会导致内、外侧轮不符合阿克曼转角。
(三)摄像头的安装
摄像头的支撑架应尽量使用较轻的材料,以减轻车体的重量使其更加轻巧,且安装的位置应该在满足前瞻的情况下,尽量安装在质心位置,并保证支架的垂直和稳固。这样才能保证小车在行驶的途中,车体和摄像头之间不会来回晃动,造成摄像头采集的图像失真。摄像头还要架在一个合理的高度上,且与支撑架成一定夹角,只有这样才能拥有较低的重心,和有利的前瞻。
(四)车模重心和底盘加固
车体重心位置对赛车加减速性能、转向性能和稳定性都有较大影响。车身重心前移,会增加转向,但降低转向的灵敏度,同时降低后轮的抓地力,影响加减速性能;重心后移,会减少转向,但增大转向灵敏度,后轮抓地力也会增加,提高加减速性能。因此,确定合适的车体重心,让车模更加适应比赛赛道是很关键的。今年我们在前轮位置增加了垫片,降低重心,还减低了电池的高度,同时把摄像头安装在中间,底盘做了加固。增加了赛车的转向灵活度,减少了车在行驶过程中产生的震荡。
三、智能车算法
(一)赛道边界提取
为了后续方便对图像做类型的分析,我们先把赛道两边的边界提取出来,提取的方法有很多种,较为常用的是黑线跟踪法,黑线跟踪法的具体步骤为:先确定几行无错的边界所在位置;根据上一行边界所在的位置,在下一行的附近进行查找;如果连续多行找不到左右边界或图像数据分析完毕,则即可结束查找。黑线跟踪法可以极大的节省单片机时间,加快图像处理的速度。
(二)赛道类型的识别
提取出赛道后,即可对赛道类型进行分析,分析方法也有很多种,较为简单的是对图像的固定区域位置进行检测,例如图3所示。
对图中两条黑线(为了方便显示黑线上半部分采用反色)所在区域进行判断,可以得到左边黑线和赛道的交点,比右边赛道黑线与赛道的交点要高,即可得出前方为左拐弯道(实际情况可能较为复杂,需要具体问题具体分析,本文给出了主要思想)。此方法在使用时,需要预先确定两条黑线的区域位置,如果太靠近将导致左右黑线与赛道的交点高低难以判断,离太远又容易有多个交点(如左边黑线如果太靠近左边会和赛道产生3个交点)造成混淆,所以黑线的位置需要根据自己的实际情况来选定,只要方便判断不易误判即可。
(三)障碍的识别
对于有障碍的赛道来说,对图像做边界处理之后,障碍元素信息就会丢失,所以在识别障碍的时候需要分两个步骤完成:先做边界提取获取赛道类型;对原始图像做障碍分析。对于第一步使用黑线跟踪算法即可,对于第二步,可以在图像的上半部分(提前预判)每隔5个像素做一次横向扫描,如果连续扫到多个像素为黑色,且在赛道中(可根据第一步获得的边界信息进行判断),然后对其纵向扫描,计算出上下间距,如果在设定值之间即可判定为障碍。设定值取决于障碍大小和对小车之间的距离。需要根据实际情况进行分析,之所以需要进行横纵两方面扫描,是为和小S,直角标记线等元素进行区分。
四、系统调试
为了使舵机能更快更好的对给定的转角值做出响应,我们采用位置式PID控制器,电机采用增量式PD调节,通过不断改变P、I、D三个参数进行试凑实验,得到了一组响应较好的参数,可以使得车在高速行驶时能保持很好的稳定性,从而大大消除由于传感器带来的误差,控制方法如式一:
△u(n)=Kp[e(n)-e(n-1)]+KIe(n)+KD[e(n)-2e(n-1)+e(n-2)] (式一)
各个参数对小车的影响:
比例Kp:适当的比例能迅速反应误差,从而减小误差,但是比例不能消除稳态误差,比例的加大会引起系统的不稳定。
积分Ki:积分的作用就是只要系统存在误差,就不断的累积误差,直到消除误差。但是如果积分作用太强会使系统超调加大,甚至出现震荡。
微分Kd:微分可以减小调整时间,从而改善系统的动态性能。
经过多次测试,智能车可以完成快速稳定的行进,本文在通过图像识别技术对道路识别进行改进,利用PID控制器进行控制,对参数进行调整后,系统可以执行正确的指令,智能车行进得更稳,并且车速上有一定提升,经过实验验证,该系统工作稳定,寻迹准确,小车的运行速度快。
【参考文献】
[1]于海生.计算机控制技术[M].北京:机械工业出版社,2007
[2]卢京朝.自动控制原理[M].西安:西北工业大学出版社,2009
[3]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航天航空大学出版社,2007
[4]杨素行.模拟电子技术基础简明教程[M].北京:高等教育出版社,2005
【基金项目】2014年度广西高等教育教学改革工程项目(2014JGZ189)
猜你喜欢
东方少年·布老虎画刊(2023年5期)2023-06-14
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
电子测试(2018年13期)2018-09-26
山东工业技术(2016年23期)2016-12-23
教育界·下旬(2016年8期)2016-12-14
科学与财富(2016年26期)2016-12-01
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
汽车维修与保养(2015年8期)2015-04-17