一种可灵活配置的机械手晶圆定心装置
2016-07-10 07:38褚明杰张锋孟庆铸
电子技术与软件工程 2016年8期
褚明杰 张锋 孟庆铸
摘 要:在半导体行业中,各腔室之间或工位之间通常使用机械手来完成晶圆的传送。在晶圆传输系统中,为避免取片时偏位或晶圆破损等客观因素的发生,提高晶圆取放的准确度,需要设计并使用AWC(Active Wafer Centering)晶圆自动定心功能来进行检测与校正。本文总结了半导体厂商对AWC功能的不同需求,设计了一种通过上位机软件灵活配置AWC功能的机械手晶圆定心装置,可有效解决AWC硬件资源的浪费及更改互联电缆所造成的人力物力上的浪费问题。
【关键词】AWC功能 腔室 半导体
1 引言
AWC功能通常每个工位使用一组(1~2个)传感器,机械手在执行GOTO指令的过程中,当传感器检测到有晶圆出入时,会立刻采集伺服轴位置数据并锁存,根据采集到的数据计算出晶圆圆心与机械手手指中心的偏差。在机械手伸展到位的同时,R轴和T轴会自动对该偏差矢量进行补偿处理,实现自动纠偏,直到偏差消除后GOTO指令结束,保证了晶圆被准确的传送到目标工位。
目前半导体行业中应用的机械手都是通过运动控制卡或伺服驱动器本身具有的高速输入采集电路来完成AWC传感器信号的高速采集功能。该功能需要使用运动控制卡或伺服驱动器的高速输入信号采集电路,当传感器扫到晶圆的边沿时通过高速输入电路来锁存当前机器人伺服轴的位置值。机械手在到达工位并完成晶圆定心操作后,还要与半导体工艺设备进行IO互锁操作,以保证传输晶圆安全。
2 系统设计
2.1 需求分析
半导体生产商对AWC功能支持的工位数需求从1工位到8工位甚至更多,而AWC应用每个工位需要2路高速输入信号,为满足全部半导体生产商的需求,机械手的AWC信号采集电路至少要满足8工位需求,即16路高速输入采集电路。
而在实际应用中,大部分的半导体生厂商用不到8工位AWC功能,这就会造成机械手硬件资源的浪费,且使机械手的成本增加。而且当生产工艺发生改变时,如果AWC功能及IO互锁功能需要调整,这样就需要更改机械手与半导体工艺设备间的互联电缆,且需要大量的时间来对设计更改进行调试,造成人力物力上的浪费。
所以需要设计一种集成AWC采集电路及IO互锁电路的可灵活配置的机械手晶圆定心装置。该装置可有效对AWC硬件资源进行灵活分配,避免由于工艺改进、设备升级等原因所引起的人力、物力及时间上的资源浪费。
2.2 总体方案设计
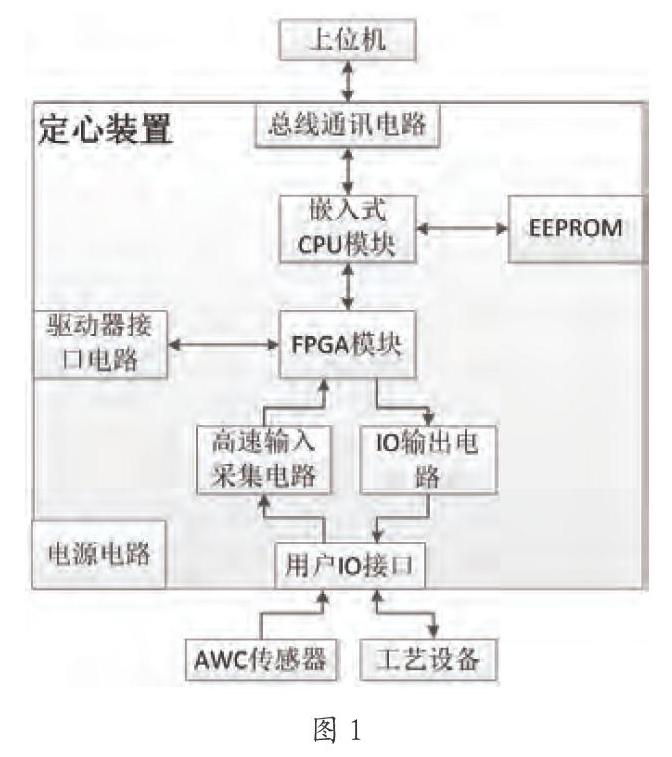
整个装置主要由图1中框图部分电路组成:
将用于AWC功能的高速输入信号与IO互锁信号全部接入本装置,省略IO采集卡。将IO互锁信号中的输入部分采集电路全部通过与AWC高速输入电路一样的电路实现,并将二者的采集电路全部接入FPGA,不明确区分AWC电路及IO输入电路,默认全部
为高速输入电路。用户通过上位计算机将需要的AWC工位应用信息及IO互锁信息生成配置文件,并通过通讯总线下发给本装置。本装置中的嵌入式CPU模块读取配置文件并存储在非易失性存储器中。系统上电后,本装置会自动进行初始化操作,在这个操作过程中嵌入式CPU模块会将存储在非易失性存储器中配置文件读出,并根据配置文件对FPGA内部的管理输入及输出信号的寄存器进行配置,配置后寄存器可灵活的将所有高速输入信号配置成AWC功能或IO互锁功能。如有工艺升级或设备升级等需要改动AWC功能或IO互锁功能的情况时,只需重新通过上位机生成配置文件并下发给本装置即可完成AWC及IO互锁功能的再配置。
嵌入式CPU模块做为整个装置的处理核心,选用TI公司C2000系列数字信号处理器TMS320F2812PGFA型号。主要功能是采集高速输入信号并锁存伺服轴位置值,控制IO互锁功能实现。通过现场总线与上位计算机通讯并将AWC工位及IO互锁的配置信息写入EEPROM模块以及操作FPGA等器件。
FPGA模块采用Altera公司最新发布的MAX10M08SAU169型号,通过地址数据线与嵌入式CPU模块接口。主要功能是通过驱动器接口电路读取编码器信号和对驱动器发送位置指令或速度、转矩指令等操作,并将被其内部IO配置寄存器配置为AWC功能的高速输入信号“线与”成串行中断信号,输出给嵌入式CPU模块,使CPU响应中断后锁存当前伺服轴位置值。每次上电后嵌入式CPU模块从EEPROM模块中读取AWC工位及IO互锁的配置信息,并写入FPGA模块。FPGA模块根据配置信息对高速输入电路进行配置。
EEPROM选用Atmel公司AT25640AN型号,通过SPI总线与嵌入式CPU通讯。存储AWC工位及IO互锁功能的配置信息,每次系统上电后嵌入式CPU模块先读取EEPROM中存储的配置信息,然后对FPGA中的IO配置寄存器进行配置。
总线通讯电路和驱动器接口电路采用数字隔离器将定心装置与外围设备隔离。
高速输入采集电路选用通讯速率10Mb/s以上的高速隔离型光耦采集AWC传感器信号及IO互锁功能中的输入信号。
3 结论
本晶圆定心装置可以非常方便的使半导体生产商结合自己机台的工艺情况通过上位计算机灵活的配置AWC功能及IO互锁功能。当生产工艺改变时不需更改机械手与工艺设备的互联电缆,只需将新的配置文件下发给本装置即可完成AWC及IO互锁功能的再配置,极大的节省人力物力。
参考文献
[1]黄春霞,曹其新,刘仁强.晶圆预对准精确定位算法[J].高技术通讯,2007(07).
作者单位
沈阳新松机器人自动化股份有限公司 辽宁省沈阳市 110168
猜你喜欢
能源化工(2022年1期)2023-01-14
石油机械(2021年1期)2021-01-13
制冷(2019年2期)2019-12-09
科技风(2019年1期)2019-10-14
传感器世界(2019年3期)2019-02-17
东北农业大学学报(2018年9期)2018-10-19
电子工业专用设备(2018年4期)2018-08-17
光学精密工程(2016年5期)2016-11-07
中国惯性技术学报(2015年1期)2015-12-19
长江大学学报(自科版)(2014年4期)2014-03-20