基于船位监控系统的拖网捕捞努力量提取方法研究
2016-07-11 08:54张胜茂唐峰华黄华文
海洋科学 2016年3期
张胜茂,张 衡,唐峰华,樊 伟,黄华文
基于船位监控系统的拖网捕捞努力量提取方法研究
张胜茂1,张衡1,唐峰华1,樊伟1,黄华文2
(1.中国水产科学研究院东海水产研究所,农业部东海与远洋渔业资源开发利用重点实验室,上海 200090;2.上海普适导航技术有限公司,上海 201112)
摘要:为了基于船位监控系统提取拖网捕捞努力量,通过统计航速获得 3个峰值,拖网作业在第 2个峰值,即1~2.1 m/s,拖网作业航向差一般在-50°~50°。利用航速、航向差阈值设定,把拖网船状态划分为慢速、作业、航行,然后提取出捕捞作业状态点,1 423艘拖网船共提取到处于捕捞状态的点318 433个,合计拖网捕捞时间15 921 h,利用反距离加权插值法生成捕捞强度分布变化趋势图。捕捞努力量在渔业资源研究中是重要的参考值之一,与传统的捕捞努力量计算方法相比,该方法具有实时、大范围、快速、分辨率高的特点,能够用于辅助渔业资源保护。
关键词:北斗卫星; 船位监控系统; 捕捞努力量; 航向; 航速
[Foundation: Fundamental Research Funds in Central Public-interest Scientific Institution,No.ECSFRI2014T13; Twelfth Five-year Scientific and Technological Support Project,No.2013BAD13B01; Shanghai Municipal Science and Technology Commission,No.12511501200]
捕捞努力量在渔业资源变动研究中是一个重要的参数,即在捕捞中所做的功,传统计算方法是由投入生产的渔船数量、总吨位、功率,以及作业人数、作业时间、技术与工艺状况、投网次数等折算获得[1-4]。随着近年来渔船船位实时监控系统逐步得到应用推广,可获取高时空精度的渔船船位数据,通过船位数据统计分析能从一个新的角度获得捕捞努力量。我国南海、东海等海区,相继应用北斗导航卫星构建了渔船监控系统。通过船位监控系统的船位数据能够计算出累计捕捞时间,把它作为拖网捕捞努力量,这种方法具有近实时、范围广、自动、快速等特点,可以获得高时空分辨率的累计捕捞时间。联合国粮农组织(FAO)采用每年总的发动机功率和捕捞作业时间(kW·d)表达全球捕捞努力量,在渔船捕捞方式、捕捞渔区、捕捞鱼种确定,并且在时段一定的情况下,累计捕捞时间与渔获量成正相关,Lee等[5]的研究对此也做了一些验证。国外[6-7]已经用 VMS(Vessel Monitoring System)信息计算捕捞努力量,用于渔业资源评估。北斗卫星导航系统在渔业中的应用研究经过多年的发展[8-9],已经初具规模,据统计到目前为止安装北斗卫星导航系统终端的渔船已经有 4万余艘,通过获取的船位数据可以做到对捕捞努力量的计算[10-11]。本研究利用拖网船的船位数据,通过航速、航向阈值区分出捕捞状态,把捕捞作业状态的累计捕捞时间作为捕捞努力量,将某个区域内渔船累计捕捞小时数作为该区域的捕捞努力量,建立中国近
海渔船实时快速的捕捞努力量估算方法。
1 材料与方法
1.1数据来源
北斗渔船船位数据来源于上海的北斗民用分理服务商,数据主要包括渔船的北斗卡号、经纬度、航速、航向、发报时间。船位数据时间分辨率为3 min,空间分辨率约为10 m。数据库选用SQL Server 2008,它具有管理分析空间数据的功能,可以确定几何图形实例之间的空间关系。
捕捞类型、船名等信息主要来源于“中央财政国内海洋渔船油价补助公示”资料,经过与北斗数据的匹配,确定了3 333艘渔船的类型,其中数量较多的是拖网和刺网。拖网船有 2 212艘,占总量的 66%,本研究以拖网为例进行研究。
1.2方法

渔船是否处于捕捞的状态通过式(1)判断,当航速和航向处于某个阈值范围之内时,处于捕捞状态。其中,V1和V2是捕捞状态的航速阈值,D1和D2是捕捞状态的航向差阈值,两个阈值通过拖网渔船状态分析与航速统计来确定。

一个渔区格网内可能有多艘渔船,一艘拖网渔船捕捞分为多个网次,一般每个网次持续几个小时,一个网次结束后间隔一段时间,然后是下一网次。每个网次又有离散的多个船位点组成,因此某个格网内的累计捕捞时间用式(2)计算。其中,Zi是第i个渔区格网的累计时间,Pi,j,k、Pi,j,k-1是某渔船相邻的两个船位点的时间,两者的差是时间长度。第一次求和是一个网次内累计捕捞时间,第二次求和是一艘拖网渔船一段时间多个网次的累计捕捞时间,第三次求和是第i个渔区格网内所有拖网渔船的累计捕捞时间。
捕捞对象是游动的鱼类,当在某个渔区捕捞时,会对周边的渔业资源量产生影响,某渔区的累计捕捞时间越大,周边渔业资源下降越快,几个相邻点的累计捕捞时间在周边范围产生一个资源量影响的趋势面。通过插值生成趋势面专题图,能够辅助资源量全局变化趋势分析,本文采用反距离加权插值法[12]生成变化趋势专题图。
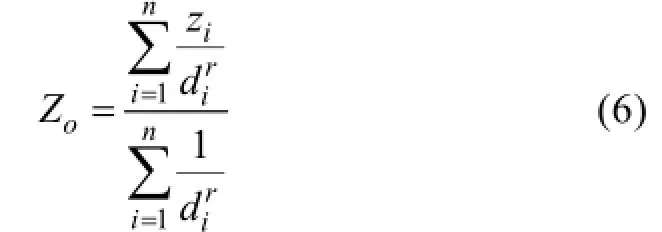
假定每个待插值点都受到局部影响,而这种影响会随着距离的增大而减小。插值是以权重进行加权平均,所以该平均值不会大于最大输入值或小于最小输入值[13]。如果采样对于正在尝试模拟的已有变量来说足够密集,则基于反距离权重会获得最佳结果[14-15]。渔区格网中心离散点分布较均匀,在制图分辨率要求较低的情况下,其密集程度可以满足局部表面的变化分析[13],公式如下:其中,Zo为O 点的估计值; n 为在估算中用到的控制点数目; λi为预测计算过程中使用的已知点的权重,该值随着样点与预测点之间距离的增加而减小; Zi为控制点i 的Z 值。确定权重的计算公式为:

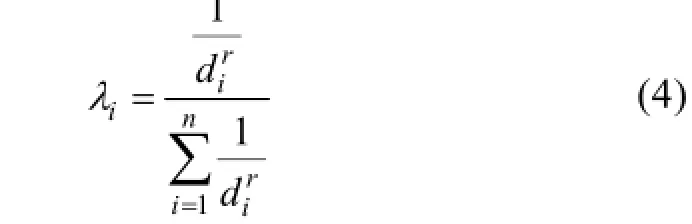
其中,r 为指定的指数,本文反距离加权插值法中的r默认值设为2; di为控制点i 与点O 间的距离。

采样点随着与预测值点之间距离的增大,其对预测点影响的权重按指数规律减小。在预测过程中,各采样点对预测点作用的权重大小是成比例的,这些权重的总和为1。式(4)代入式(3),经过转换可以得到式(6),文中插值所用公式为式(6)。
2 研究结果
2.1拖网渔船状态分析
拖网属于过滤性的运动渔具,依靠渔船的运动拖曳网具,在海底或海水中前进,迫使渔具经过水域中的鱼虾蟹等捕捞对象进入网囊,达到捕捞的目的,捕捞作业过程有放网、拖曳网具、起网3个阶段。2012年10月10日浙江奉化北斗卡号为300585的拖网船(以下称“拖网船300585”),在00: 00~24: 00的轨迹如图1 a~h点,通过调研以及数据分析可知: 该渔船在00: 01从a点开始是处于航行状态,02: 30航行到b点(30°33′N ,123°41′E),并在b点附近抛锚休息,05: 07开始拖网捕捞作业,经过b~h点共拖网作业6次,在21: 09到h点(30°21′N ,123°43′E),并在h点附近抛锚休息。
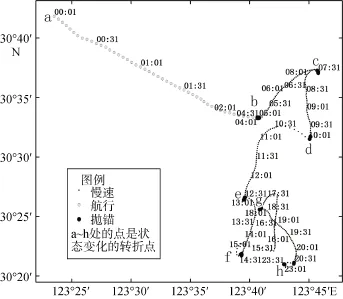
图1 2012年10月10日拖网船300585轨迹Fig.1 Tracks of trawlers 300585 on October 10,2012
表1是对图1中2012年10月10日拖网船300585 从00: 00~24: 00进行的船位统计,各节点是渔船状态变化的点,各分段是渔船所处的状态,平均速度是各段内的渔船速平均值,累计行程是各段中,点连线的曲线长度,相对距离是两个起止节点的最短距离,长度比是累计行程与相对距离的比值。A段平均速度较大,长度比最小; B段和I段船员休息处于抛锚状态,航速因海流与风的影响而产生,B段2.5 h移动了150 m,I段约3 h移动了72 m; C~H段平均速度在1.3~1.8 m/s,长度比在1.3左右,F段由于渔船弯曲航行捕捞,因此比值较大。
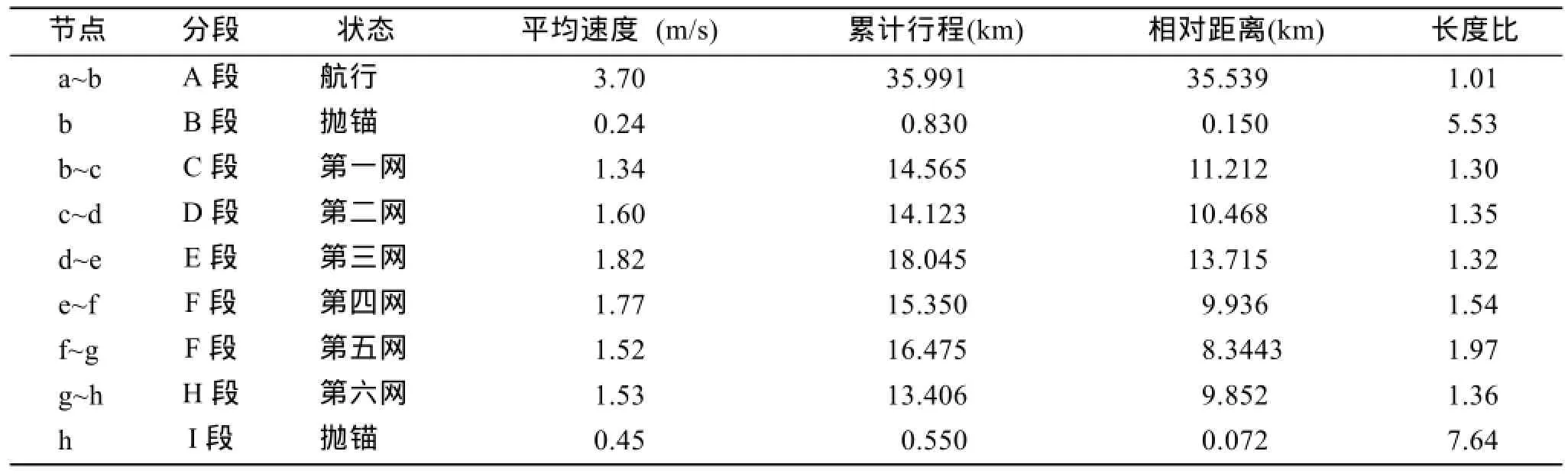
表1 2012年10月10日拖网船300585状态Tab.1 Status of trawlers 300585 on October 10,2012
图2是2012年10月10日00: 00~24: 00拖网船300585航向变化,图中的 A~I段按照状态划分,其分段与图1和表1中相同,渔船的航向(方位角)是指在水平面上以渔船位置为中心,从该点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,航向值在0°~360°之间。
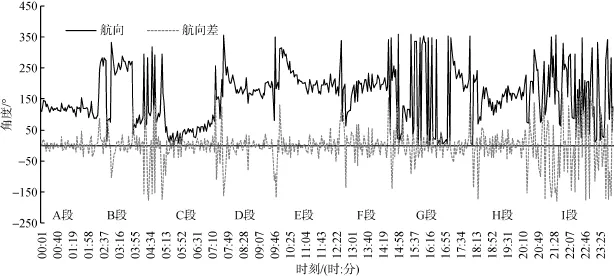
图2 2012年10月10日00: 00到24: 00 拖网船300585航向变化Fig.2 Heading changes of trawlers 300585 from 00: 00 to 24: 00 on October 10,2012
当渔船航向在 0°或 360°附近变化时,航向值会出现较大的变化幅度,图 2中航向变化较大的有 B段、G段、I段,为了进一步分析航向的实际变化状况,对航向角进行了差值计算。航向差是两个相邻时间,后一时间航向与前一时间航向的差值,差值结果中的正值表示航向顺时针转动,负值表示渔船航向逆时针转动。图2中航向差主要在0°左右变化,图中 G段为捕捞状态,但航向变化大,经过相邻航向相减处理成航向差后与其他捕捞状态时的航向差相似。为了避免渔网缠绕,拖网船作业时在3 min内一般不会出现较大的航向变动。
图3是2012年10月10日00: 00~24: 00拖网船300585航速的变化,图中的 A~I段按照状态划分,其分段与图1和表1中相同,基本可以分为,抛锚的B段和I段,捕捞的C~H段、航行的A段,3种状态。在C~H段的6次拖网作业中,每段都有航速的突变,段开始有航速峰值,段结束有航速的谷值,两者之间是一个持续的较稳定航速,这是因为拖网作业特点有放网、拖曳网具、起网 3个阶段。放网时渔船从尾滑道放出网具,然后渔船快速前进逐步放出曳纲,出现航速峰值的突变; 当曳纲放出预定长度后,渔船按预定的航向和航速拖网前进,航速较稳定;起网时渔船慢速前进收绞曳纲、网具,将其自尾滑道拖到甲板上,取出渔获物,出现航速谷值的突变,航向差变化较大。
累计变化角度是航向差值的累加和,按照航向差顺时针加,逆时针减的方式计算。累计变化角度可以反映出渔船方向在一段时间角度总体的变化值。图3中抛锚B段和I段,累计角度变化较大,捕捞C~H段、航行 A段累计角度变化小,拖网船 300585 在2012年10月10日从00: 00~24: 00,累计角度是-1 066°,即船在这24 h内相对初始航向逆时针转了近3圈。

图3 2012年10月10日00: 00~24: 00拖网船300585船速与累计变化角度分布图Fig.3 Speed distribution and cumulative change angle of trawlers 300585 from 00: 00 to 24: 00 on October 10,2012
由以上分析拖网船可以分为抛锚或慢速、作业、航行 3种状态,结合航速和航向差可以判断出这些状态(表2),2012年10月10日00: 00到24: 00,拖网船300585作业时间15.9 h,航行2.5 h,抛锚5.6 h。
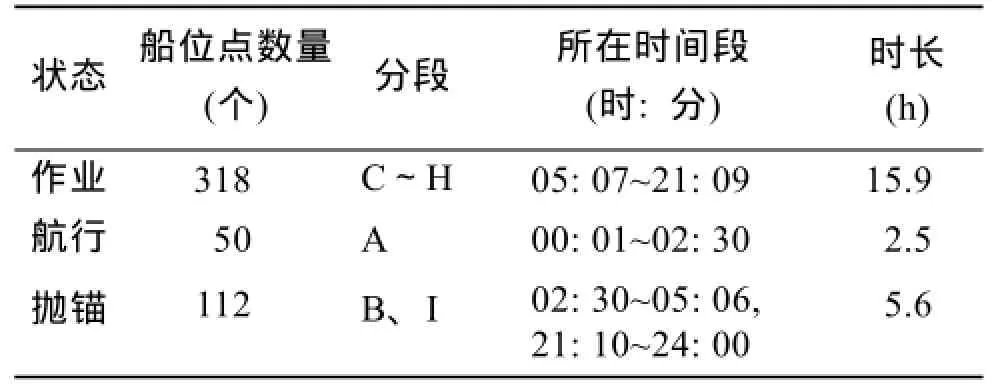
表2 拖网船300585作业状态Tab.2 300585Boat Status
2.2拖网渔船航速统计
图4和图5是拖网船300585在2012年1~5月、9~12月及全年船位点记录数量随速度的变化,它是对2012年该船全年位置点的统计。由于渔船进渔港停泊时也发送船位数据,因此产生了很多值为0 m/s的数据,这些数据对分析没有意义,统计中去掉了这些数据,6~8月是拖网的休渔期,统计中没有统计这几个月。
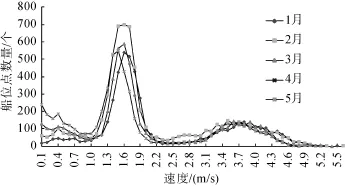
图4 2012年1~5月点记录数量随速度的变化Fig.4 Number of point changes according to speed in 2012 from January to May
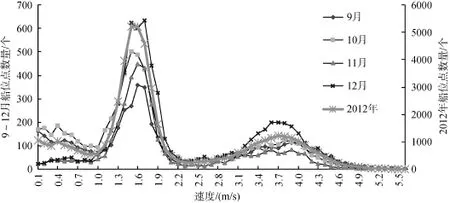
图5 2012年9~12月及全年点记录数量随速度的变化Fig.5 Number of point changes according to Speed in 2012 from September to December and 2012 year
图4和图5曲线类似,主要存在3个峰,第一个在0~1 m/s,渔船处于抛锚或漂流; 第二个在1.3~1.9 m/s,渔船处于捕捞状态; 第三个在3.3~4.3 m/s,渔船处于航行。
每个拖网渔船全年统计曲线与拖网船300585在2012年汇总曲线基本相同,利用拖网船 300585的全年统计数据与数据库中其他渔船的统计数据计算相关系数R,可以判断出拖网船,结果如表3,相关系数在 0.9时,可以正确判断出拖网渔船 781艘,判断错误的渔船59艘,正确率在93%,因此拖网船300585的统计数据具有代表性。
对2012年拖网船300585的100390个船位点,进行统计绘图(图4、图5),其他拖网船全年点记录数量随速度的变化曲线相近,根据图中第二个峰值位置,设定公式(1)中V1为1 m/s,V2为2.1 m/s。各船绘制航向差分布图,与拖网船 300585相似,设定渔船拖网作业时的航向差 D1为-50°,D2为50°。
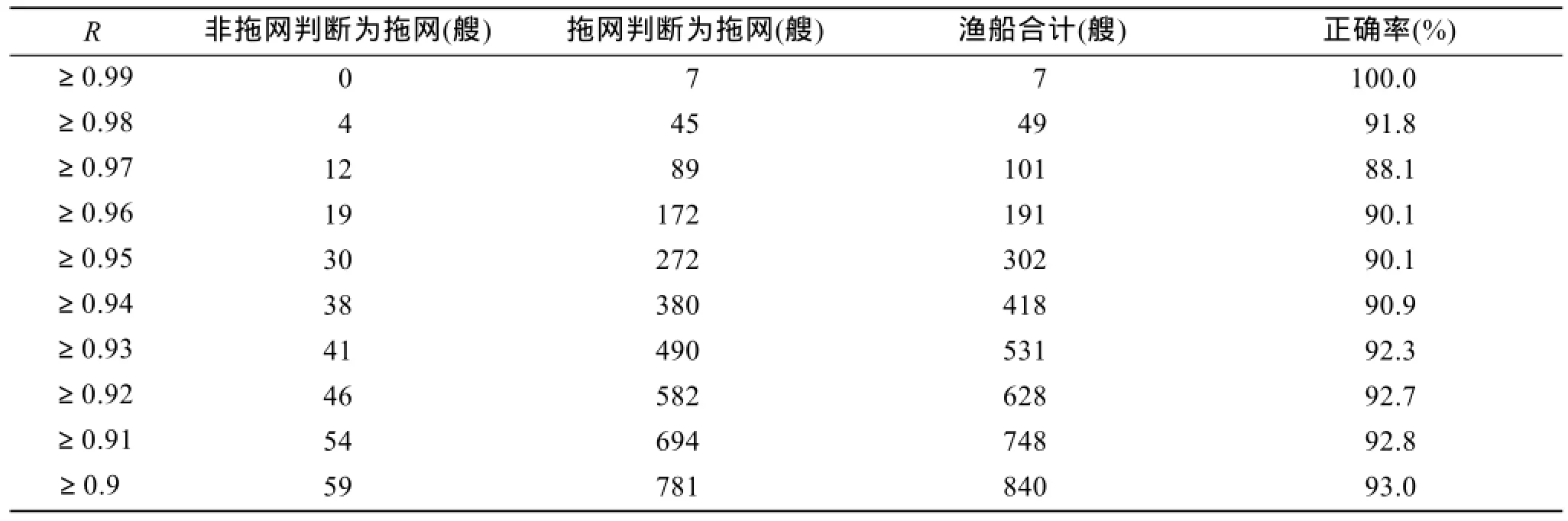
表3 拖网渔船判断Tab.3 Trawler judgment
2.3累计捕捞时间专题图
项目选用ArcGIS制作累计捕捞时间专题图,以2012年10月10日的插值图为例,把海域按0.1°×0.1°划分格网,按照公式(1)计算格网中所有渔船在 2012 年10月10日0~24 h捕捞状态的累计捕捞时间(单位h),作为捕捞努力量。根据拖网船航速、航向阈值提取出处于作业状态的点,共提取到1 423艘拖网船处于捕捞状态的点318 433个,合计拖网捕捞时间15 921 h。把点分布到0.1°×0.1°的格网中,计算每个格网中的累计捕捞时间,图 6中的点是 0.1°×0.1°格网中心点(格),颜色变化代表累计捕捞时间的长短,图中对格点值采用公式(6)进行了插值,生成2012年10月10日插值图,反应拖网捕捞投入的分布趋势面。
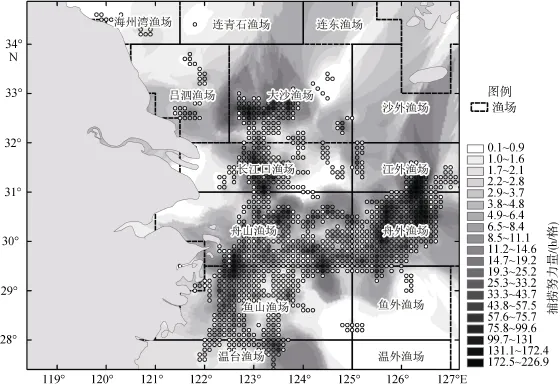
图6 2012年10月10日累计时间捕捞强度分布Fig.6 Distribution of cumulative time of fishing intensity on October 10,2012
在传统的渔场格网中,可以看出累计捕捞时间最高的渔场在舟外渔场和江外渔场南部,大沙渔场、长江口渔场、舟山渔场与鱼山渔场交界的区域也有较高的累计捕捞时间分布。
3 讨论与分析
国外学者基本都通过渔船的速度和角度区分渔船作业状态,Skaar,Jørgensen等[16]根据船速分析巴伦支海的鳕鱼拖网捕鱼活动,Mills,Townsend等[17]在英国北海利用拖网渔船的速度和方向识别作业和航行状态。另外有学者通过船位数据计算捕捞努力量,2005年Deng和 Dichmont等[18]用澳大利亚北部对虾作业的船位数据估算拖网捕捞强度,还有学者利用船位数据研究捕捞行为,Walker,Beza等[19-20]利用贝叶斯模型研究捕捞过程。
拖网船有抛锚或慢速、作业、航行3种状态,拖网作业的每个网次有放网、拖曳网具、起网 3个阶段,通过分析拖网渔船的航速、航向差的特征可以判断渔船的状态,掌握渔船的作业规律,根据长时间的渔船航速特点可以获取到渔船各状态的航速阈值,再通过该值结合航向差能够提取出渔船处于捕捞状态的船位点,根据点的数量,处于捕捞状态点的持续时间,计算出在某个区域累计捕捞时间,制作出累计捕捞时间格点图,插值出累计捕捞时间变化趋势图。
拖网捕捞的累计时间越长,投入的功越多,累计捕捞时间在一定程度上能够反映出捕捞努力量,即一个时间段内多艘拖网船投入捕捞小时数的累加。但是由于拖网船功率不全相同,单位时间投入功的大小存在差别,因此在掌握渔船功率数据的条件下,将进一步研究累计捕捞时间与功率的乘积,获得累计捕捞(kW·h),把它作为捕捞努力量。拖网渔船在网具放置水层深度不同、捕捞鱼种不同、功率不同的情况下作业的航速有些细微差别,因此下一步研究中将根据每艘船的航速阈值分别判断渔船状态。
下一步将从时空角度分析累计捕捞时间变化规律,比较累计捕捞时间与传统捕捞努力量计算方式的优缺点,做进一步改进。通过编程实现累计捕捞时间专题图的自动制图,逐渐实现业务化,为渔政管理、渔业资源保护提供指导和借鉴。
致谢: 中国水产科学研究院东海水产研究所严利平研究员,张寒野、刘勇、冯春雷副研究员等为本文撰写提出了积极建议,谨此致谢!
参考文献:
[1]张衡,张胜茂.东南太平洋智利竹筴鱼渔场及单位捕捞努力量的时空分布[J].生态学杂志,2011,30(6):1142-1146.Zhang Heng,Zhang Shengmao.Spatiotemporal distri-bution pattern of Chilean jack mackerel(Trachurus murphyi)fishing grounds and catch yield per unit effort in Southeast Pacific Ocean[J].Chinese Journal of Ecology,2011,30(6): 1142-1146.
[2]田思泉,陈新军.不同名义CPUE计算法对CPUE标准化的影响[J].上海海洋大学学报,2010,19(2):240-245.Tian Siquan,Chen Xinjun.Impacts of different calculating methods for nominal CPUE on CPUE standardization[J].Journal of Shanghai Ocean University,2010,19(2): 240-245.
[3]方水美.福建沿海张网作业捕捞能力的计算分析[J].中国水产科学,2005,12(3): 321-328.Fang Shuimei.Calculated analysis on fishing capacity of swing net in Fujian coastal sea [J].Journal of Fishery Sciences of China,2005,12(3): 321-328.
[4]郑国富.底拖网作业捕捞努力量标准化方法研究[J].福建水产,2000,85(2): 28-34.Zheng Guofu.An approach to the standardization of fishing effort of bottom trawl[J].Journal of Fujian Fisheries,2000,85(2): 28-34.
[5]Lee J,South A B,Jennings S.Developing reliable,repeatable,and accessible methods to provide highresolution estimates of fishing-effort distributions from vessel monitoring system(VMS)data [J].ICES Journal of Marine Science: Journal du Conseil,2010,67(6):1260-1271.
[6]Mullowney D R,Dawe E G.Development of performance indices for the Newfoundland and Labrador snow crab(Chionoecetes opilio)fishery using data from a vessel monitoring system[J].Fisheries Research,2009,100(3): 248-254.
[7]Stelzenmüller V,Maynou F,Bernard G,et al.Spatial assessment of fishing effort around European marine reserves: Implications for successful fisheries management[J].Marine Pollution Bulletin,2008,56(12):2018-2026.
[8]郭飚,薛元宏.北斗系统在海洋渔业信息化建设中的关键技术与实现途径[J].现代渔业信息,2004,19(5):13-14.Guo Biao,Xue Yuanhong.Key technique and realized way of Beidou System(Staellite Navigation System)in the construction of marine fisheries information[J].Modern Fisheries Information,2004,19(5): 13-14.
[9]张胜茂,王晓璇,周为峰.基于渔船监测系统的近海捕捞水产品溯源[J].电脑开发与应用,2014,24(4):16-19.Zhang Shengmao,Wang Xiaoxuan,Zhou Weifeng.Offshore fishing aquatic products traceability based on vessel monitoring system[J].Computer Development and Applications,2014,24(4): 16-19.
[10]胡刚,马昕,范秋燕.北斗卫星导航系统在海洋渔业上的应用[J].渔业现代化,2010,37(1): 60-62.Hu Gang,Ma Xin,Fan Qiuyan.The apllications of COMPASS Navigation Satellite System to marine fishing industry[J].FisheryModernization,2010,37(1):60-62.
[11]居礼.北斗卫星导航系统在海洋渔业的应用[J].卫星与网络,2013(3): 16-22.Ju Li.Application of Beidou satellite navigation system in marine fishery[J].Satellite and Network,2013(3):16-22.
[12]张胜茂,樊伟.海洋次表层FIDW温盐影像插值算法[J].计算机工程与应用,2012,48(26): 205-209.Zhang Shengmao,Fan Wei.FIDW algorithm for temperature and salinity image interpolation in sub-surface ocean[J].Computer Engineering and Applications,2012,48(26)205-209.
[13]汤国安,杨昕.ArcGIS地理信息系统空间分析实验教程[M].北京: 科学出版社,2006.Tang Guoan,Yang Xin.ArcGIS geographic information system spatial analysis experiment course[M].Beijing:Science Press,2006.
[14]Watson D F,Philip G M.A refinement of inverse distance weighted interpolation[J].Geoprocessing,1985,2:315-327.
[15]Philip G M,Watson D F.A precise method for determining contoured surfaces[J].Australian Petroleum Exploration Association Journal,1982,22(1): 205-212.
[16]Skaar K L,Jørgensen T,Ulvestad B K H,et al.Accuracy of VMS data from Norwegian demersal stern trawlers for estimating trawled areas in the Barents Sea[J].ICES Journal of Marine Science,2011,68(8):1615-1620.
[17]Mills C M,Townsend S E,Jennings S,et al.Estimating high resolution trawl fishing effort from satellite-based vessel monitoring system data [J].ICES Journal of Marine Science: Journal du Conseil,2007,64(2): 248-255.[18]Deng R,Dichmont C,Milton D,et al.Can vessel monitoring system data also be used to study trawling intensity and population depletion? The example of Australia's northern prawn fishery [J].Canadian Journal of Fisheries and Aquatic Sciences,2005,62(3):611-622.
[19]Walker E,Bez N.A pioneer validation of a state-space model of vessel trajectories(VMS)with observers' data[J].Ecological Modeling,2010,221(17): 2008-2017.
[20]Bez N,Walker E,Gaertner D,et al.Fishing activity of tuna purse seiners estimated from vessel monitoring system(VMS)data[J].Can J Fish Aquat Sci,2011,68(11): 1998-2010.
Received: Feb.17,2014
(本文编辑: 刘珊珊)
Key words:Beidou satellite; vessel monitoring system; fishing effort; heading; speed
Method of extracting trawling effort based on vessel monitoring system
ZHANG Sheng-mao1,ZHANG Heng1,TANG Feng-hua1,FAN Wei1,HUANG Hua-wen2
(1.Key Laboratory of East China Sea & Oceanic Fishery Resources Exploitation and Utilization,Ministry of Agriculture,China,East China Sea Fisheries Research Institute,Chinese Academy of Fishery Sciences,Shanghai 200090,China; 2.Shanghai Ubiquitous Navigation Technologies Ltd.,Shanghai 201112,China)
Abstract:The purpose of this study was to extract trawling effort from the statistics of a vessel monitoring system.Using speed data,the results show that there are three peaks in trawling effort.The second peak is in the fishing state,and generally occurs at speeds between 1 m/s to 2.1 m/s.The heading difference is between -50 and 50 degrees.Trawlers have three states,including low speed,fishing,and sailing,which can be distinguished by their thresholds of speed and heading differences.We extracted a total of 318 433 fishing-state points from 1 423 fishing vessels,and the total trawling time was 15 921 h.We used an inverse distance weighting interpolation method to generate change trends in the fishing intensity distribution.Fishing effort is an important reference value in fishery resource research.Compared with traditional fishing effort calculations,this method is characterized by real-time,large-scale,rapid,and high resolution.The results are applicable in the conservation of fisheries resources.
中图分类号:S975
文献标识码:A
文章编号:1000-3096(2016)03-0146-08
doi:10.11759/hykx20140217002
收稿日期:2014-02-17; 修回日期: 2014-06-28
基金项目:中央级公益性科研院所基本科研业务费专项资金项目(东海水产研究所 2014T13); 十二五国家科技支撑计划项目(2013BAD13B01);上海市科学技术委员会资助项目(12511501200)
作者简介:张胜茂(1976-),男,河北吴桥人,副研究员、博士,主研方向: 渔业遥感与地理信息,电话: 021-65682395,E-mail: ryshengmao@126.com; 通信作者,樊伟,男,河南郑州人,博士,研究员,研究方向为渔业遥感与地理信息,电话: 021-65680117,E-mail:dhyqzh@sh163.net
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
舰船科学技术(2022年10期)2022-06-17
水上消防(2022年1期)2022-06-16
新世纪智能(高一语文)(2021年3期)2021-07-16
中国水运(2020年10期)2020-12-08
民用飞机设计与研究(2019年4期)2019-05-21
舰船科学技术(2018年7期)2018-07-25
现代装饰(2018年3期)2018-01-17
电子制作(2017年24期)2017-02-02
广东造船(2016年3期)2016-07-13