
某型飞机襟翼机构显示动力学仿真研究
2016-07-15 15:02汤国伟
科技视界 2016年17期
关键词:运动仿真
汤国伟
【摘 要】本文通过HyperWoks软件对某型飞机襟翼机构进行显示动力学分析,通过采用RADIOSS求解器,利用中心差分法,成功得到襟翼运动机构在气动载荷下的运动情况,验证滑轮与滑轨之间运动方式。
【关键词】襟翼机构;运动仿真;显示动力学
【Abstract】Explicit dynamic analysis of flap track has been done by Hyperworks. By using of RADIOSS solver, and Central Difference Method, motion of flap track has been successfully obtained, and the contact between rollers and track has been verified.
【Key words】Flap track; Motion simulation; Explicit dynamics
0 前言
民用飞机襟翼运动机构用来控制襟翼翼面在指定位置的收放。在运动过程中受到复杂的、动态变化的载荷的作用。研究襟翼运动机构在复杂载荷下能否按照设计轨迹完成规定运动,对襟翼运动机构设计有非常重要的意义[1]。
HyperWorks软件中RADIOSS Block对非线性运动方程的求解采用中心差分法。该算法在求解有限元控制方程时,只需在各个时刻点上直接进行计算,不必在时间步长内迭代,使得中心差分算法非常适合求解高度不连续问题(如接触和失效问题)。本文按照非线性动力学有限元求解流程,建立襟翼机构显示动力学模型,计算得到襟翼机构在气动载荷下的运动模式,验证襟翼机构的设计。
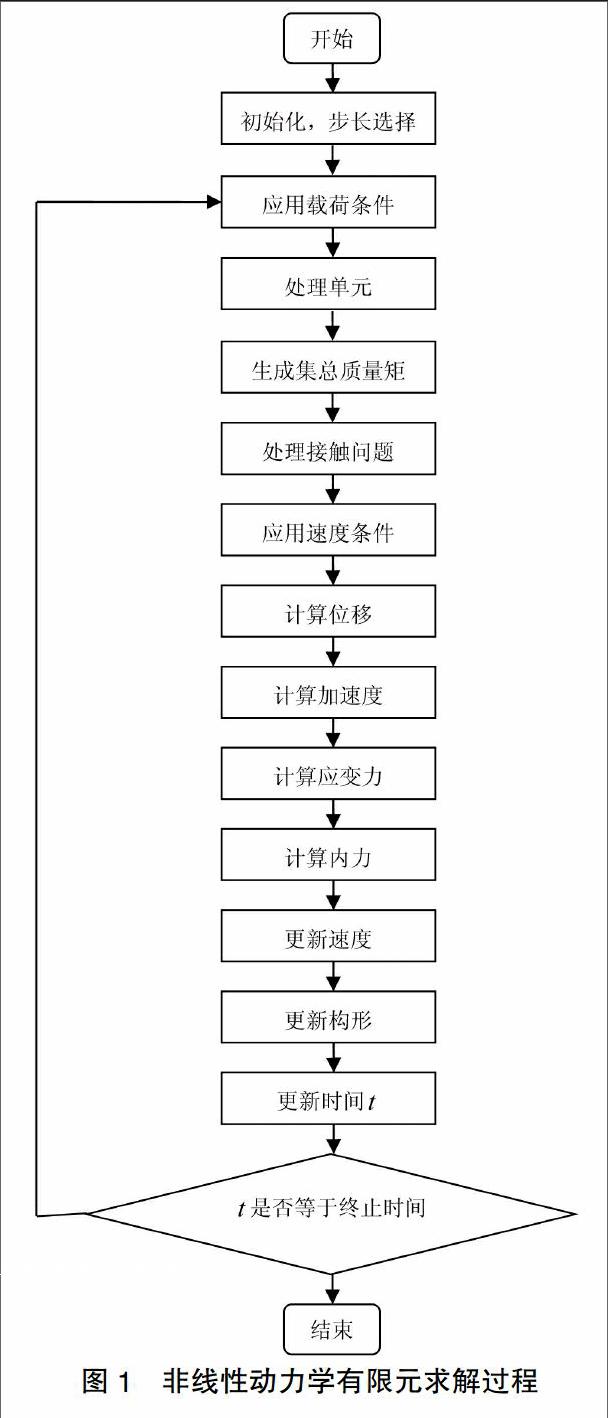
1 非线性动力学有限元求解流程
基于非线性动力学有限元控制方程和有限元法的基本过程,可将非线性动力学的有限元求解过程概括为如图1所示。有限元模型中最小尺寸单元决定中心差分算法的时间步长选择,它的尺寸越小,将使整个积分步数增多,整个模型求解的计算时间增加。这一点在划分网格模型时需特别注意,避免因个别单位尺寸过小而导致计算时间不合理的增加。同时,也不能使单元的尺寸过大,导致有限元求解失真。
2 襟翼机构建模
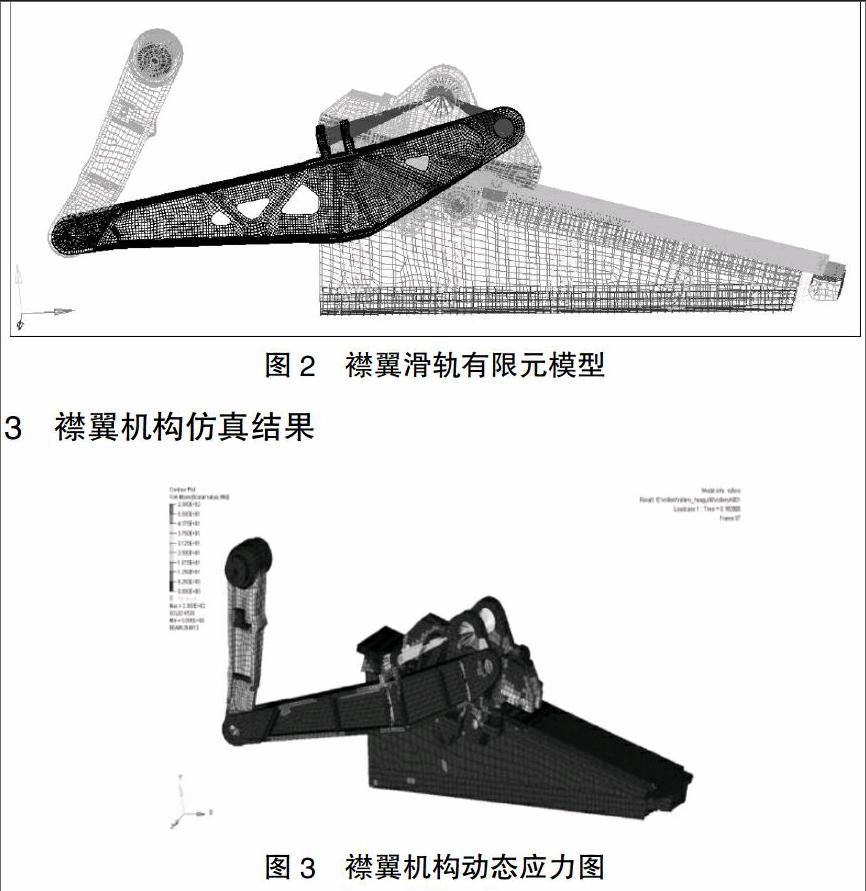
襟翼机构主要包括驱动连杆,摇臂,滑轮架以及滑轨,用HyperWorks分别对这些零件建立有限元模型,采用.rad格式模型,二维单元采用SHELL单元,三维单元采用BRICK单元。机构之间采用弹簧单元Spring Type13,该单元是具有12个自由度的弹簧单元,具有6中相互独立的变形模式:轴向拉压、扭转、弯曲(2个)和剪切(2个)。通过对6个方向的刚度设计不同的参数值,可以模拟各种铰接方式。
滑轮与滑轨之间的接触采用type7 点面接触,设置摩擦系数0.2,通过反复测试验证,滚轮与滑轨的网格大小为2.5mm-3mm,既保证计算效率也保证正确模拟两者之间的滚动接触。
在滑轮架处施加襟翼的气动载荷,在驱动连杆上施加强制角度位移驱动,对机构进行驱动。有限元模型如图2所示。
3 襟翼机构仿真结果
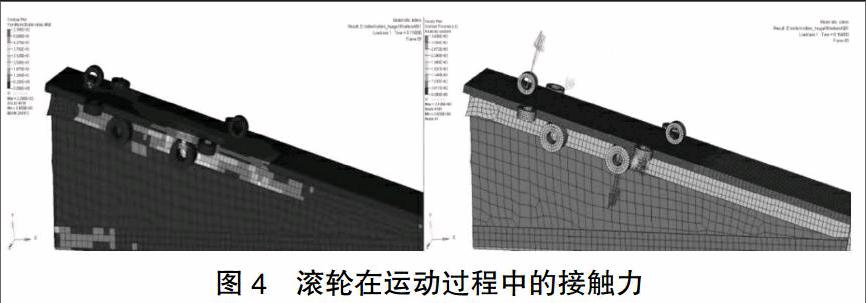
仿真结果显示,在气动载荷作用下,滑轮架滚轮与滑轮为单边接触,接触良好,由于摩擦力的作用,滚轮发生转动运动。另一侧滚轮与滑轨之间存在间隙,两者没有载荷作用。正常收放工况下,襟翼机构运动良好,无卡滞等现场产生。图3为襟翼机构的动态应力图。通过非线性显示动力学分析可以捕捉机构在每个位置的实时应力以及应力变化图。图4为滚轮在运动过程中接触力图。通过接触力可以看出左右滚轮分别有一个前后滚轮与滑轨接触,前后滚轮前滚轮与滑轨接触。运动过程中,接触力没有剧烈的变化,运动平稳。
4 结论
通过襟翼机构非线性显示动力学分析,可以验证襟翼机构的运动过程,实时查看运动部件及受理情况。仿真结果显示,在真实气动载荷作用下,运动过程中,襟翼机构并非所有滑轮与滑轨均接触。通过检查运动过程中滚轮与滑轨的实时接触力,可以发现虽然并非所有滚轮均接触,但是接触滚轮受力稳定,滚动运动良好。
【参考文献】
[1]刘军.气动加载在多体动力学中的实现[J].科技视界,2015,27:121-122.
[责任编辑:汤静]
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
汽车科技(2016年6期)2016-12-19
东方教育(2016年3期)2016-12-14
考试周刊(2016年22期)2016-05-06
现代电子技术(2015年8期)2015-07-09
