基于继电器反馈的自整定PID调节器设计
2016-07-18 09:29白迎斌
甘肃科技 2016年7期
白迎斌
(兰州交通大学机电工程学院,甘肃 兰州 730070)
基于继电器反馈的自整定PID调节器设计
白迎斌
(兰州交通大学机电工程学院,甘肃 兰州 730070)
摘要:PID控制是目前过程工业应用最普遍的控制方法之一。但是简单PID控制不能很好地适应对象系统特性变化时的最佳控制要求,而人工调整参数在控制精度和调整频度上均不可能满足时时变化的对象系统的控制要求。目前己有的多种具有PID参数自整定功能的智能调节器大多整定复杂并对实际控制过程有影响。鉴于PID控制方法目前仍有广泛应用,PID参数自整定调节器的设计将具有很好的应用价值和市场空间。针对应用现状,提出并实现了一种基于继电器反馈,具有自整定功能的PID调节器的设计。
关键词:PID控制;继电器反馈;自整定;调节器
PID控制是目前过程工业应用最普遍的控制方法之一。但是简单PID控制不能很好地适应对象系统特性变化时的最佳控制要求,而人工调整参数在控制精度和调整频度上均不可能满足时时变化的对象或系统的控制要求。目前己有的多种具有PID参数自整定功能的智能调节器大多整定复杂并对实际控制过程有影响。鉴于PID控制方法目前仍有广泛应用,PID参数自整定设计将具有很好的应用价值。同时,工业装置在运行过程中,过程对象的动态特性会发生或大或小的变化,实现PID参数的自整定,可以在过程特性发生变化以后使控制器参数随之作相应的变化,即可使PID控制器具有一定的自适应控制能力。
继电器反馈自整定PID调节器可以应用在简单过程控制系统、复杂过程控制系统,能完成自动整定PID初始参数、自动在线优化PID参数,保证系统在优化的情况下工作。调节器具有节省人工、优化运行、配置简单等特点,使控制系统的投运、调试、运行简便、高效。
1 继电器反馈自整定PID算法
继电自整定PID参数的基本思路是在控制系统中设置两种模式:自整定模式和调节模式。在自整定模式下,由继电器闭环的极限环法来整定系统的临界比例增益和振荡频率,而在调节模式下,由PID参数整定方法整定出PID参数值,然后对控制对象进行控制调节,如果控制系统发生变化,则需要重新进行自整定。继电型PID自整定控制的结构如图1所示。图1中,GaCjωc为广义被控对象,当开关S位于自整定位置时,系统处于整定状态,当开关S置于调节位置时,系统进行PID控制输出。

图1 继电反馈自整定结构图
用描述函数方法来确定系统的增益Kc和振荡频率ωc,图2为系统的继电非线性环节特性。
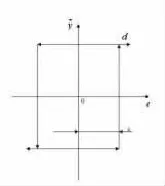
图2 继电非线性环节特性图
由描述函数理论可知,图2中给出的带有回环的继电非线性环节特性的描述函数可以表达为

式中:A代表正弦波幅值;d表示回环幅值;ε代表回环宽度的一半。
只考虑一种简单的情况,假设继电非线性环节不带有回环,即若ε=0,则描述函数可以简化为

当继电反馈用描述函数分析时,继电器用一个近似的线性等价描述函数假定,则可以给出对象的频率响应为:

描述函数分析中假设G(jωc)的奈氏曲线与实轴在-1/N(A)的ωc处相交,而对像的奈氏曲线与负实轴的交点称为临界点,定义对象的临界点频率ωd为如下:

因此可以估计临界点频率ωd和临界增益Kd:

当已知系统的临界比例增益和振荡周期时,可以用经验整定公式来确定PID参数值,表1给出了根据Ziegler-Nichols整定公式。
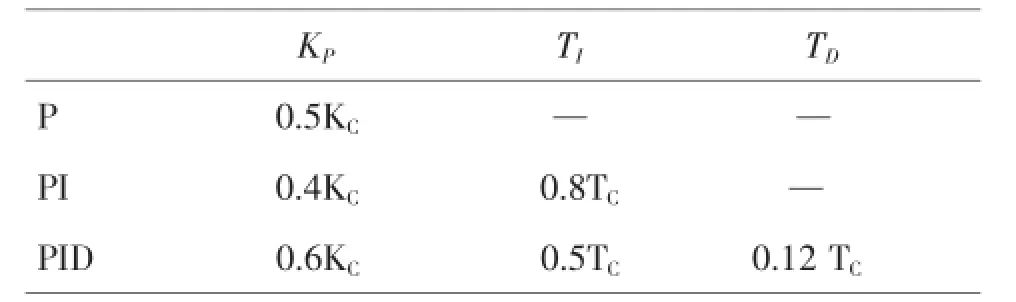
表1 Ziegler-Nichols整定公式
继电自整定方法简单,可靠,需要预先设定的参数就是继电器特性的参数[1]。
2 系统的硬件设计
本设计的硬件框图如图3所示。
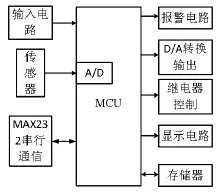
图3 调节器硬件电路框图
通常单片机所要控制的继电器大多为DC5V的小型电子继电器。尽管如此,光靠单片机的输出端口的电流恐怕不够,况且要驱动继电器线圈这种电感性负载还需要有些保护,图4所示为低电平动作的继电器驱动电路,当单片机输出低电平时,单片机输出的FET导通,可吸入高达数毫安的电流(即ib),如此大的ib将使晶体管饱和、继电器激磁,其中电阻R12提供限流保护。当单片机输出高电平时,单片机输出端的FET不导通,所以ib=0,晶体管截止,继电器不激磁。另外,由于线圈属于电感性负载,当晶体管截止时,ic=0,而原本线圈上的电流iL不可能瞬间为0,所以二极管D10就提供一个iL的放电路径,使线圈不会产生高的反向电动势,可防止破坏晶体管[2-3]。
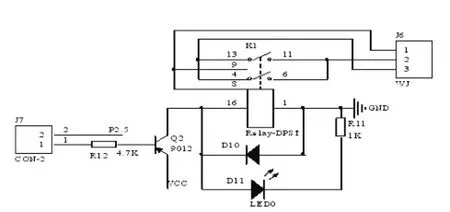
图4 继电器驱动电路
3 系统的软件设计
3.1系统主程序
整个程序设计采用C语言完成。当控制器上电复位或因为程序跑飞导致看门狗复位发生时,程序首先进入初始化函数,对定时器、串行通讯、中断等部分的参数进行设置,之后程序便进入主循环。调节器控制系统软件按照功能包括:按键处理模块、A/ D转换及其处理器模块、继电反馈模块、存储器模块、PID控制模块、主模块[4-5]。图5为本系统软件的总体流程图。
3.2PID控制算法
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。由PID控制的数字实现可知增量式PID控制的公式为

式中:

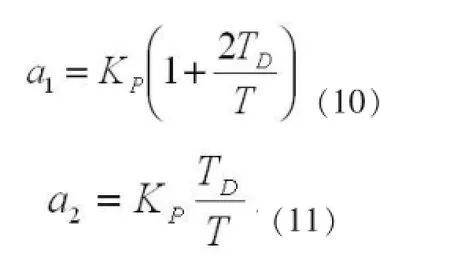

图5 主程序流程图
本设计采用的是增量式PID控制。由计算机控制系统中的经典PID控制理论可得流程图,图6中r(k)为系统设定值,c(k)为实际测量值。在增量形式的控制算式中,控制作用中的比例、积分、微分部分是相互独立的[6-7]。

3.3继电器反馈自整定程序设计
图7为参数自整定流程图。
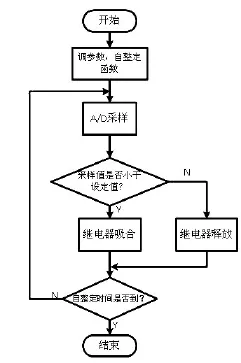
图7 参数自整定流程图
参数自整定函数所要完成的功能是,当被调用时,系统对被控对象进行继电控制,当传感器采样值小于设定值时继电器吸合,被控电路回路导通工作,当传感器采样值大于设定值时继电器释放,被控电路回路断开停止工作。当被控对象有一定的滞后时间,产生等幅振荡,由振荡周期和临界增益便可计算出PID参数[8]。
4 结论
本设计介绍了基于继电器反馈的自整定PID控制器的设计。其中软件调节采用的是继电自整定PID算法调节,它能方便地实现稳定的过程控制。并且通过通讯电路模块,方便控制器与计算机的通讯和程序下载。本设计只是初步实现了PID参数自整定基本功能,要真正实现调节器自整定优化功能还有待进一步研究。
参考文献:
[1]何宏源,徐进学,金妮.PID继电器整定技术发展综述[J].沈阳工业大学学报,2006,27(4):57-64.
[2]刘太生,PID控制器参数自整定方法比较[J].国外建材科技,2005,26(1):10-16.
[3]郑飞,姜学东.嵌入式PID控制器及显示系统的设计[J].微计算机信息,2009,10(2):63-64.
[4]李华.MCS-51系列单片机实用接口技术[M].北京:北京航天大学出版社,2007:156-178.
[5]张义和,王敏男.例说51单片机(C语言版)[M].北京:人民邮电出版社,2010:20-23.
[6]郑飞,姜学东.嵌入式PID控制器及显示系统的设计[J].微计算机信息,2009,10(2):63-64.
[7]刘太生,PID控制器参数自整定方法比较[J].国外建材科技,2005,26(1):10-16.
[8]梅晓榕.自动控制原理[M].科学出版社,2007:176-195.
中图分类号:TP23
猜你喜欢
自动化仪表(2018年11期)2018-11-21
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年17期)2017-12-18
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27