
自主巡航的四轴飞行器控制系统的设计与实现
2016-07-22 21:12林明宝余春艳
电脑知识与技术 2016年16期
关键词:控制系统
林明宝+余春艳

摘要:惯性导航技术的飞跃发展及相关传感器在精度方面的提高,使得无人飞行器特别是四轴飞行器获得快速的发展。国内以深圳大疆创新科技有限公司为代表的无人机逐渐进入寻常百姓家,使得无人机的运用范围不再仅仅局限于军事领域。本文将对一种自主巡航的四轴飞行器控制系统的设计和实现过程做出详细的说明。该系统以PID算法为核心,利用无线传输技术,将地面站点指定的飞行路线传送给四轴飞行器,利用GPS实现飞行器的自主巡航。
关键词:自主巡航;四轴飞行器;PID;控制系统
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)16-0227-04
1概述
四轴飞行器隶属于多轴飞行器,由于其结构相对简单,飞行时稳定性易于控制,方便悬停,动作灵活等优点,而成为飞行器爱好者争相研究的对象。由于其体积小,但能产生较大升力,使得其能在较小的空间里执行人为需要的任务,而不易被发现,因此越来越多地被运用到民用和军事等领域,比如,战地情报搜索、震后地势拍摄等。
2 飞行原理及基本飞行状态
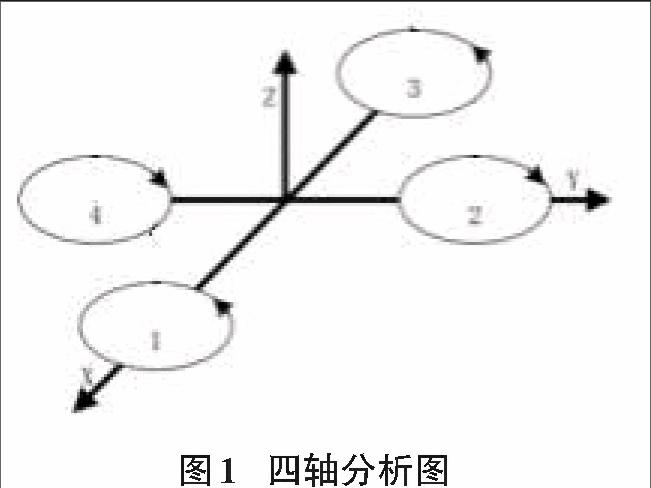
在飞行空间中,飞行器可分别在x轴、y轴、z轴三个方向做平移和旋转运动,因此,共计有6个自由度。通过控制四个电机的转速,可实现在这6个自由度上的运动。基本运动状态有6种,分别是:垂直运动、俯仰运动、滚转运动、偏航运动、前后运动、侧向运动。如图1所示,旋翼1、3逆时针旋转,2、4顺时针旋转。本文中,设计旋翼3为四轴头方向。
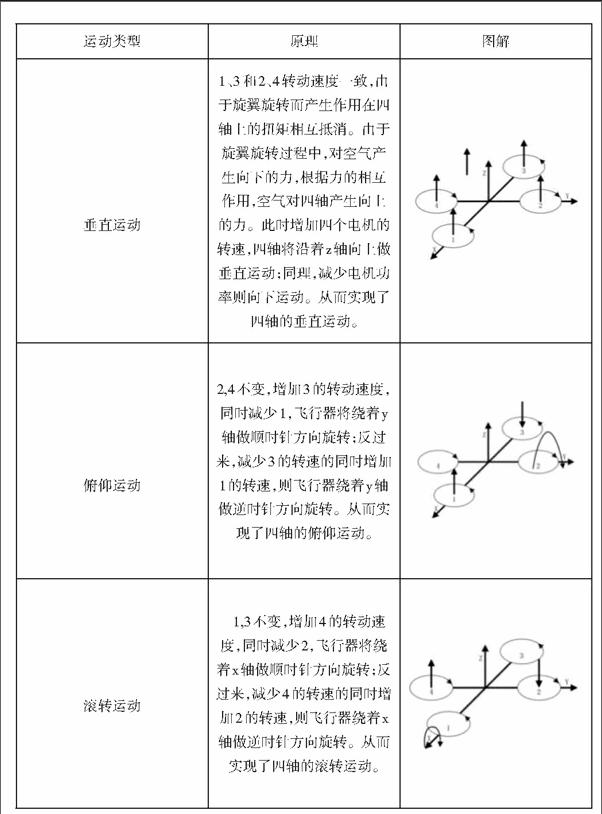
下表阐述了四轴的6种基本运动类型及其对应的原理解析与图解。
3 控制系统的实现
3.1 硬件控制系统
要实现四轴的稳定飞行,需要有专门设计好的硬件控制系统,实现四轴的姿态矫正,才能完成预期的飞行效果。图2是硬件控制系统的设计原理图。
本系统单片机采用STM32F103C8T6微控制处理芯片,控制板上焊接有MPU6050六轴运动处理组件来获取飞机在飞行过程中的姿态信息,无线传输技术将安卓APP指定的飞行路线传给控制系统,在GPS导航下完成指定路线的飞行。图3是本系统设计好的主控板正反面。
3.2 飞行器姿态解算
四轴坐标系由地理坐标系(E-xyz)和机身坐标系(B-xyz)组成,地理坐标系确立四轴的地理位置,机身坐标系确立四轴的姿态。四轴飞行姿态有三个:翻滚角(roll)、俯仰角(pitch)、偏航角(yaw)确立,分别记为:
姿态解算是指将四轴的线性加速度和角加速度根据一定的计算方式,得到四轴的实时姿态信息。本文采用四元数算法,得到飞行器姿态数据。Mpu6050内嵌入了DMP四元数解算功能,可免去微控制器的计算处理时间。图4位惯性导航原理图。
四轴焊接有mpu6050,具有三轴加速度计和三轴陀螺仪的功能,加速度计获取相对于地面坐标系的三轴加速度,陀螺仪获取相对于机身坐标系的三轴转速。在姿态解算中,加速度的作用是对根据陀螺仪积分得到的三个姿态角进行修正,修正的快慢由PID算法中的kp和ki两个参数进行控制。如图5,为四元数操作流程图。
3.3 飞行器控制算法的实现
3.3.1 PID控制器的实现
PID,为比例、积分、微分的对应英文首字母的简写,是现在应用的最为广泛的工业控制器,最初是模拟PID,通过硬件实现,现在出现了对积分和微分进行离散化处理后的数字PID。本文对数字PID进行详细说明。
3.3.1 四轴姿态调整的实现
通过mpu6050获取加速度和角速度,经过四元数解算后,我们便得到了四轴的姿态信息,通过四轴内嵌的GPS模块,同时也得到了四轴所处的地理位置信息。在此基础上,四轴需要能够以稳定的姿态在所指定的地理路线上飞行,我们引入PID控制系统,以满足我们的飞行需求。
飞行器姿态的更动,归根结底,是更改了四个电机的占空比,使得有不同占空比的电机转速不同。故经过PID处理后的输出将调控各个电机的转速,来使得四轴接近预期的姿态。这里简单阐明PID如何实现对翻滚角的控制,如图7所示。
经四元数处理得到的翻滚角和期望值的偏差经过pid控制系统处理后,可控制着四个电机不同的占空比(pwm)的输入,电机的转速与占空比的大小成正比,因此翻滚角也由此发生变化。同理,将翻滚角改成俯仰角、偏航角、飞行位置,同样可通过控制电机来改变姿态和飞行路线。
4 总结
本文说明了所设计的自主巡航的四轴飞行器控制系统的实现,在硬件系统已经实现的条件下,本文侧重于软件算法的设计与实现。在无人飞行器快速发展的今天,消费者对无人机功能的要求也必然更加苛刻,本文所设计的四轴飞行器,实现了在稳定飞行前提下,能够按指定的路线图进行自主巡航,对四轴飞行器的进一步研究具有一定的意义,也对四轴的发展做出了一定的贡献。
参考文献:
[1] 陈振兴.基于STM32的微型四轴飞行器研究与设计[D]. 天津:河北工业大学,2013.
[2] 唐懋. 基于Arduino兼容的Stm32单片机的四旋翼飞行器设计[D]. 厦门:厦门大学,2014.
[3] 吴大勇.基于LM4F120的四旋翼飞行控制器的研究[D]. 太原:太原理工大学,2014.
[4] 汪俊.基于惯性传感单元的动作捕捉系统研究与设计[D]. 合肥:中国科学技术大学,2015.
[5] 帅英梅. 涡轮增压柴油机电控调速系统的模型与仿真[D]. 武汉:华中科技大学,2004.
