基于机器视觉的标签检测系统的设计
2016-07-23 03:01施兢业陆龚琪刘俊
科技与创新 2016年14期
关键词:机器视觉
施兢业++陆龚琪++刘俊

摘 要:基于人工检测产品标签的不足之处,提出了基于机器视觉检测打印机标签的方法。该标签检测系统利用CCD摄像机采集标签图像信息,使用中值滤波与小波阈值去噪结合的方法对标签图像进行去噪处理,并采用Otsu法进行图像分割。通过计算标签的面积、重心和方向及对比标准标签图像相来检测标签是否合格,实现了生产过程中产品标签的实时自动检测。
关键词:机器视觉;标签检测系统;CCD相机;脉冲干扰
中图分类号:TP391.41 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.14.014
随着物质生活水平的不断提高,人们越来越重视所购买产品的质量。对于任何产品,其包装上的标签直接关系着产品质量。现代工业生产的特点是连续大批量生产,具有效率高的特点。对于标签的检测,要求快速、准确、可靠、不影响生产。然而,有些工厂在标签检测这一环节仍采用人工检测。人工检测存在很多方面的不足,主要包括速度慢,无法连续、稳定检测,会因疲劳而导致检测准确率下降,这些都会影响系统的生产效率和产品合格率。
基于人工检测的不足,基于机器视觉的标签检测系统应运而生。机器视觉检测具有速度快、非接触、精度高、自动化程度高、实时性强等特点,能满足标签在线检测的要求,在检测技术中的地位越来越高。本文以打印机标签作为检测对象,针对打印机标签可能出现的破损、折叠、倾斜和颠倒等情况,计算了标签的面积、重心和方向,并将计算结果与标准标签的相应数值进行了比较,从而判断标签是否合格。
1 标签检测系统的组成
作为具有实时性和非接触性的检测系统,主要包含照明系
统、图像采集系统和图像处理系统。为了满足光源的稳定性、亮度、均匀性等方面的要求,本系统使用LED光源从斜上方照射产品标签,可保证亮度均匀和光照稳定。工业相机一般分为CMOS相机和CCD相机。其中,CMOS相机画面质量较差,而CCD相机具有体积小、灵敏度高、几何失真小、功耗低、寿命长等特点。因此,结合实际选择了黑白面阵CCD相机,并将其固定在了支架上。被采集到的标签图像通过图像采集卡传入计算机,再由计算机进行实时图像处理,判断标签是否合格。
2 标签的检测算法
本标签检测系统的检测目标是检测产品标签是否存在破损、折叠,是否粘贴颠倒、倾斜等。针对这些目标,本系统通过计算标签的面积、重心和方向这些基本特征,判断了标签是否符合要求,实现了标签的自动检测。
2.1 标签图像的预处理
在实际应用中,由于受到光照、周围环境、系统自身等方面的影响,图像在采集、传输和记录的过程中会不可避免地受到噪声的干扰,进而导致图像失真,图片质量下降,使后续处理环节受到了影响,降低了处理的效率和准确性。因此,我们需要采取相应的措施减小噪声对图像的影响,以改善图像的视觉效果,提高图像质量。
2.1.1 中值滤波
中值滤波是一种广泛应用的可滤除脉冲干扰的非线性去噪方法,即用一个移动窗口(一般取奇数个点)将窗口中心点的值用窗口内各点的中值取代。在一定的条件下,该方法能克服线性滤波器(均值滤波)造成的图像细节模糊。
设有一个一维序列为f1,f2,…,fn,窗口大小取m(m为奇数),对其进行中值滤波操作,即从输入序列中依次抽出m个数,再将这m个数按大小排序,取其序号为中点的数作为输出值,计算公式为:
. (1)
2.1.2 小波阈值去噪
小波去噪法对高斯白噪声有很好的滤除效果。小波去噪方法总体可分为3类,分别为基于小波变换模极大值去噪、基于相邻尺度小波系数相关性去噪和小波阈值去噪。其中,小波阈值去噪法较为简单且效果较好,因此,其应用和研究最为广泛。
小波阈值去噪的基本思想为分别处理小波分解后各层系数中大于或小于某阈值的系数,并利用处理后的小波系数重构消噪后的图像。在阈值去噪中,阈值函数体现了对小波分解系数的不同处理策略和不同计算方法,常用的阈值函数有硬阈值函数和软阈值函数。
2.1.2.1 硬阈值函数
硬阈值函数的基本思想为:当初始小波系数的绝对值小于阈值时,可将其设为0;当其大于或等于阈值时,不进行处理。具体可用以下公式表示:
. (2)
2.1.2.2 软阈值函数
软阈值函数的基本思想为:初始小波系数的绝对值小于所设定的阈值时,可将其设为0;当其大于或等于阈值时,可用其减去阈值。具体可用以下公式表示:
. (3)
硬阈值函数可以较好地保留图像边缘等局部特征,但会引发伪吉布斯效应等视觉失真现象;软阈值处理使图像的过程更加平滑,但可能导致边缘模糊等失真现象出现。两种阈值函数各有优点和缺点,使用时应根据实际的图像选择。
2.1.3 中值滤波与小波阈值去噪的结合
采集到的图像中往往含有多种噪声,常见的为高斯白噪声和脉冲噪声。因此,使用单一的去噪方法无法达到理想的去噪效果,通常需要多种方法相结合。本文采用中值滤波与小波阈值去噪相结合的滤波方法,先使用中值滤波处理图像中的脉冲噪声,再使用小波阈值去噪滤除高斯白噪声。该方法的去噪效果较好,且能在一定程度上保护图像的边缘。
2.1.4 实验结果及其分析
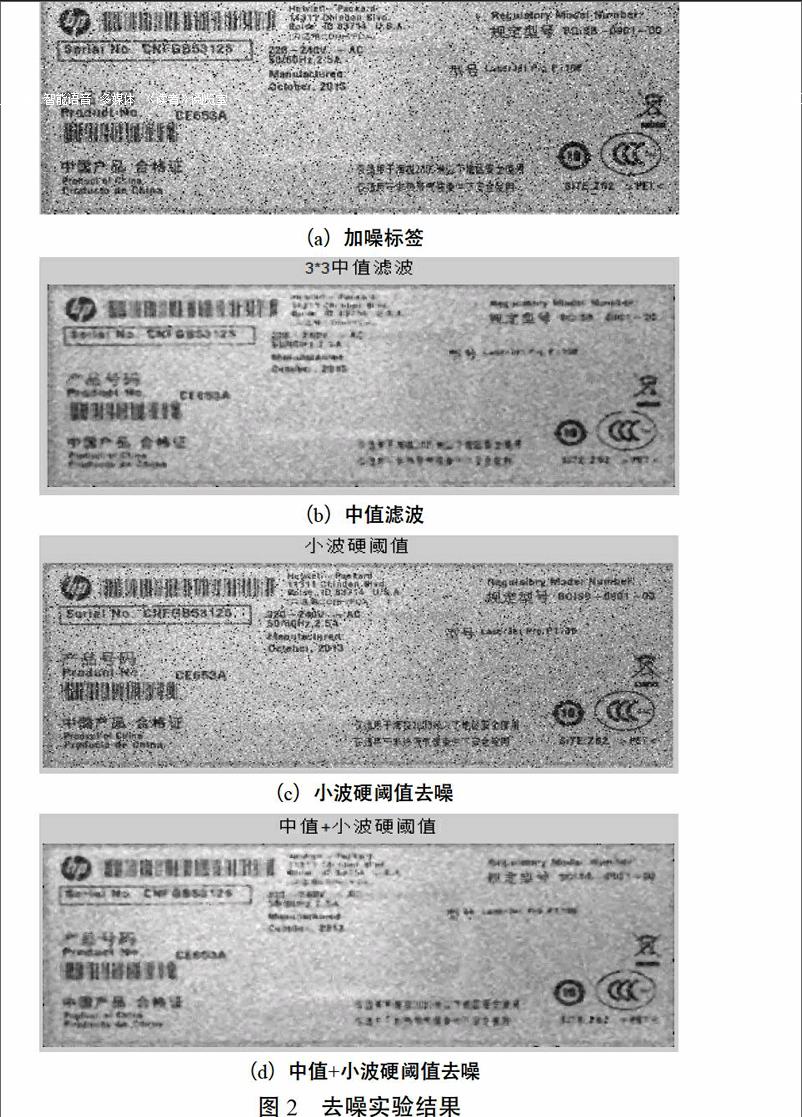
本实验基于Windows 7系统,使用MATLAB 2014a进行程序编辑,对标签图像加上噪声强度为0.07的脉冲噪声(椒盐噪声)和均值为0,方差为0.02的高斯白噪声生成含混合噪声,中值滤波采用3×3的模板,小波去噪选择sym5基函数对图像进行3层分解,并使用硬阈值函数。采用上述方法对标签图像进行处理,并计算图像的峰值信噪比(PSNR)。实验结果如图2所示。
峰值信噪比分别为PSNR(a)=14.919 1、PSNR(b)=18.404 8、PSNR(c)=15.282 4、PSNR(d)=18.885 4.
由实验结果可知,中值与小波阈值去噪相结合的滤波方法能有效地去除2种噪声,去噪效果明显比单一去噪好,且峰值信噪比较高。
2.2 图像分割
图像分割就将图像分成具有不同特征的区域,并提取感兴趣目标的技术和过程。由于本文中的标签目标对象与背景的对比明显,容易区分,因此,选用最大类间方差阈值图像分割方法(Otsu法)进行阈值分割。
Otsu法是由日本的大津于1979年提出的,也称为大津法,是阈值分割自动选取的最优方法之一。其基本思想为:用阈值将图像像素分为目标和背景两类,使用区分后得到两类的类间方差最大值确定最佳阈值。该方法会先初步选定特定图像的分割阈值,将待处理的图像直方图分割成h(x,y)和f(x,y)两组;得到两组像素值各自的相关参数后,通过搭建类间方差数学模型来获得两组像素点群体的方差,并按照一定顺序分割阈值,直至两组数据的类间方差与类内方差的比值达到最大时,此阈值分割可得到差别最大的图像分组结果,即获得最优的图像分割阈值。
在确定阈值时,σB2(T)代表阈值为k时的类间方差,ωi和μi分别为Ci组μi中像素i产生的概率和组内所有像素点灰度值的均值,μ为图像所有像素点灰度的均值。两组间的类间方差计算公式为:
处理效果如图3所示。
3 标签的检验过程
在本实验中,摄像头是固定安装的,产品检测面与摄像头是保持正对的。工作环境为室内,光照强度不变,图像中可能出现变化的只有标签。因此,对于标签的破损和折叠、粘贴方向不正确等,均可以采用计算标签面积、重心和方向的方法判断。
3.1 标签面积的计算
计算标签面积的原理为自上而下逐行扫描,计算标签的像素总个数。计算公式如下:
如果图像中有标签破损或折叠,则计算出的标签面积就会与标准标签有较大的差异。当两个面积数值的差值超出一定范围时,就可以判断为标签不合格。
3.2 标签重心的计算
设标签重心坐标为(X0,Y0),则重心的计算公式为:
由式(6)(7)可知,求重心即求图像数组中数值为1的坐标的和与面积的比值。因此,当标签面积不变时,只要标签倾斜,值为1的点的坐标必然会发生变化,进而导致重心值发生变化。对比求得的重心与预设的标准合格产品标签图像的重心值,当重心值与预先设定的值不同,且超过规定的误差范围时,则可以判断标签不合格;反之,则说明标签合格。
3.3 标签方向的计算
基于方向场的应用可以为物体定义方向。我们可以将每个物体看作椭圆,在笛卡尔坐标平面上,长轴被定义为与最小惯量轴同方向的最小二阶矩轴,从而定义长轴方向为物体的方向。图像中物体的最小二阶矩轴就是物体上所有点到该线距离的平方和的最小值。给出一幅二值图像B[i,j]对物体的所有点到直线进行最小二次方拟合,获得物体的最小二阶矩轴方程,其计算公式为:
.长轴与x轴的夹角,通过计算θ便能判断标签是否旋转以及旋转角度的大小。本系统设定θ的变化范围为± 5°。如果待检测标签的θ值与标准标签的θ值的差超过了此变化范围,则可判定此标签为不合格。
3.4 实验结果及其分析
在实验中,分别计算了合格标签和各种不合格标签的面积、重心和方向,并对得出的计算结果进行了汇总和比较。
分析表1中的数据可得,合格标签的3个数据都与标准标签较为接近,破损标签与标准标签的面积值有较大的差别,倾斜标签与标准标签的重心、方向角有明显的差异,颠倒标签与标准标签的重心有较大的差异。因此,可以将这3个数据作为判断标签是否合格的依据。此外,对足够多的标签进行检测后,其准确率可达到93%.
4 结束语
由于人工检测打印机标签的种种不足,本文设计了基于机器视觉的标签实时检测系统。该系统由LED光源、CCD相机及镜头、图像采集卡、计算机等设备组成。使用中值与小波阈值去噪结合的去噪方法;用Otsu法对图像进行二值化处理;针对可能出现的标签破损、倾斜、颠倒等现象,通过计算标签图像的面积、重心和方向来检测标签的异常。检测的准确率达93%.本系统的设计对于工业生产中标签的检测具有很大的实际意义。
参考文献
[1]段峰,王耀南,雷晓峰.机器视觉技术及其应用综述[J].自动化博览,2002(03).
[2]张德丰.详解MATLAB图像处理[M].北京:电子工业出版社,2010.
[3]储鹏鹏.基于小波变换的图像去噪方法研究[D].西安:西安电子科技大学,2009.
[4]陈晓丹,李思明.图像分割研究进展[J].图形图像,2013(11).
[5]N Otsu.A Threshold Selection Method from Gray-level Histograms. IEEE Transactions on Systems,Man and Cybernetics,1979,9(01).
[6]贾云德.机器视觉[M].北京:科学出版社,2000.
〔编辑:张思楠〕
猜你喜欢
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
科技视界(2016年6期)2016-07-12
科技视界(2016年15期)2016-06-30
科技视界(2016年16期)2016-06-29
企业导报(2016年10期)2016-06-04