
无线传感器网络下MAC层实时性改进方法
2016-07-23 07:49齐春辉朱雪宏李宗奎丁承君
河南科技大学学报(自然科学版) 2016年5期
齐春辉,朱雪宏,李宗奎,丁承君
(河北工业大学 机械工程学院,天津 300130)
无线传感器网络下MAC层实时性改进方法
齐春辉,朱雪宏,李宗奎,丁承君
(河北工业大学 机械工程学院,天津 300130)
摘要:在多机器人系统无线传感器网络下,信息传输实时性要求高,传输量大。为了保证重要信息传输的有效性和实时性,本文将媒体访问控制协议中的改进最小竞争窗口值方法与优先级方法相结合,减少信息阻塞和高丢包率的同时,保证特殊信息传输的实时性。实验结果表明:该方法能有效减少特殊信息延迟时间,提高多机器人系统灵活性。
关键词:多机器人系统;ZigBee;信息通信;实时性;丢包率
0引言
在多机器人系统中,机器人在完成任务时需要相互协调合作,将传感器信息和控制命令进行交互或传回控制中心,这就要求既要减少信息阻塞,又要保证信息传输的实时性。近年来,大量学者对无线网络通信进行了研究。文献[1]提出了一种全局网-任务网协同工作的两层式网络系统架构,利用全局网保证网络的连通性。文献[2]针对通信冲突问题加入载波侦听多路访问/碰撞检测(CSMA/CA)算法,较好地解决了多移动机器人无线通信系统中的冲突问题。文献[3]对机器人Ad_hoc 网络的路由协议进行了对比研究,并指出AODV被动式路由协议整体性能较为优越。文献[4]对基于CSMA/CA的媒体访问控制(medium access control,MAC)协议进行了优化,解决了MAC协议与树状结构无线传感器网络不匹配的问题,可减少信道资源浪费,提高网络传输效率,降低能耗。文献[5]借助合理有效的通信网络布放规则,实现了井下煤矿救援机器人数据的实时有效传输。但在超大量数据传输中,极少有研究既解决高丢包率问题,又保证信息传输实时的要求。
多机器人通信系统要求既有大量视频和音频数据传输,又有实时性要求高的控制命令传输。针对这种特殊的网络系统,本文将基于CSMA/CA的MAC协议改进最小竞争窗口值方法和优先级方法相结合,对特殊信息设置较高发送/接收优先级。对节点丢包率、能量消耗和特殊信息传输延迟时间进行统计分析,并通过实验验证了算法的有效性。
1普通非均等信道抢占机制的缺陷

图1 多跳传输模型示意图
多机器人系统通信是在无线传感器网络下进行的,本文采用IEEE 802.15.4[6]无线网络通信协议。在多机器人系统中,多个机器人相互协调完成某项工作,各自传感器信息共享,同时又受主机控制。当机器人相距较远时,传输信息要以其他机器人为中转器,经多跳的形式将信息传到目标节点,多跳传输模型如图1所示。
在基于CSMA/CA的改进MAC协议中,根据各层节点数和各节点子节点数确定最小竞争窗口值,给予父节点相对于子节点更多的抢占信道的机会[7-8],对于普通的无线系统能有效减少信息阻塞和高丢包率现象。但对于多机器人系统,由于需要传输大量视频和音频信息,长时间占用信道资源,导致控制信号等不能及时地发出或接收,不能保证特殊信息传输的实时性,导致系统稳定性差,故障率高,不能满足实时控制要求。因此,普通改进的MAC协议不能满足多机器人系统的通信要求。
2基于信息优先级的改进
对于树状结构的数据传输模型而言,需要给予父节点相对于子节点更多的信道访问机会。因为从整个传输树来看,越是上层的节点,它的负载越重并且任务越重要,相对于下层的节点理应具有更高的信道占有率。最小竞争窗口值的大小决定了节点抢占信道机会的大小,通过对最小竞争窗口值的设置,可以为不同节点分配合理的抢占信道的机会。
针对多机器人无线通信网络,本文采用优先级和改进最小竞争窗口值共同控制的方法,改进非均等信道抢占机制的MAC通信协议。
借鉴文献[4]中最小竞争窗口值设置方法,本文根据节点所在层数及节点的子节点数目设置最小竞争窗口值。
(Ⅰ)计算树形结构每层的层最小竞争窗口值:
(1)
(2)

(Ⅱ)根据各节点所在层的层最小竞争窗口值与该节点的子节点数量,计算得到各节点的最小竞争窗口值,单个节点的最小竞争窗口值的计算公式为:

(3)
其中:Al(n)为该节点所在层具有的所有子节点总量;An为该节点具有的子节点数。式(3)既保证该节点的最小竞争窗口值处于上层的层最小竞争窗口值与本层的层最小竞争窗口值之间,也保证了处于同一层的节点中,拥有子节点多的节点的最小竞争窗口值比拥有子节点少的最小竞争窗口值小。

表1 不同类型传输信息优先级分配表
(Ⅲ)表1 为不同类型传输信息的优先级分配表。在控制程序中编写不同优先级信息的发送函数,传输过程中高优先级信息(如控制指令)可以打断较低优先级信息(如视频信息)的传输,较低优先级的信息则等待发送,以满足多机器人系统信息传输实时性要求。
3实验与评估
3.1ZigBee实验平台
建立基于ZigBee[9-11]的无线传感器网络平台,在这个平台上将多机器人的通信简化为ZigBee无线传感器下传感节点的通信。实验采用2 Mbps信道,数据包长度为512字节,实验中将7个节点放置在空旷区域内,节点分布如图2所示。以主节点为原点建立坐标系,其余节点坐标分别为:节点1(15,0)、节点2(10,-10)、节点3(25,8)、节点4(25,-8)、节点5(35,0)和节点6(35,-15),单位:m。
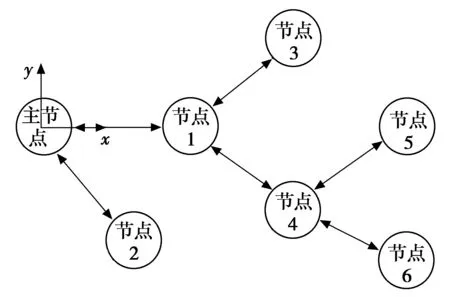
图2 节点分布图
启动各节点,各节点将自动加入网路。按照非均等信道抢占机制,计算树形结构网络各层的最小竞争窗口值、各节点的子节点数和各层的子节点数。主节点将这些参数向所有节点进行广播,各节点收到这些参数后计算出自身的最小竞争窗口值,然后再调用macMcuRandomByte()函数对MAC层的最小竞争窗口值进行设置。在各子节点成功入网后,每个子节点按设定的发送速率,发送1条包含自身短地址以及在传输过程中所经历节点的短地址的信息给主节点。主节点收到信息后,通过串口在上位机上显示收到的数据以及数据包的个数,根据串口上显示的数据,可以计算丢包率。每发送1个数据包的能耗设置为2单位,每接收1个数据包的能耗设置为1单位,可以计算无线网络成功发送1个数据包的能量消耗[12]。另外,在各节点发送过程中,节点5间断地发送1条故障信息,检测从节点5发送故障信息到主节点接收到故障信息所产生延迟的时间。使用本文算法和普通非均等竞争机制算法(改进的MAC算法),数据包的发送速率分别为300 个/s、400 个/s、500 个/s和600 个/s时进行多次实验,并统计和计算特殊指令延迟时间、丢包率和平均能量消耗。

图3 节点丢包率

图4 每成功发送1个数据包网络平均能量消耗

图5 特殊信息传输延迟时间分析
3.2实验结果及分析
数据包在不同发送速率下进行多次实验,剔除最大值和最小值后,计算平均值。在IEEE 802.15.4协议下,改进的MAC算法和本文算法的节点丢包率如图3所示。每成功发送1个数据包,网络的平均能量消耗如图4所示。特殊信息传输延迟时间如图5所示。
在图3所示的节点丢包率分析实验中,测试不同发送速率下系统丢包率。在发送速率较低的情况下,本文算法的丢包率略低于改进的MAC算法,但当高速率情况下,本文算法的丢包率略高于改进的MAC算法。整体来看:在丢包率方面,本文算法与改进的MAC算法相差不多,均能有效减少系统丢包率。在图4所示的网络能量消耗分析实验中,测试不同发送速率下每成功发送1个数据包网络的平均能量消耗,本文算法与改进的MAC算法的能量消耗基本一致。在图5所示的特殊信息传输延迟时间分析中,测试不同发送速率下特殊信息延迟时间,在发送速率较低的情况下,本文算法能明显减少信息传输延迟时间。在高发送速率的情况下,两种算法延迟时间均有所下降,但本文算法依然明显少于改进的MAC算法。
本文算法与改进的MAC算法相比,特殊信息传输延迟时间明显降低且随发送速率增加没有显著变化,极大地提高了多机器人通信系统特殊信息传输的实时性,而且,节点丢包率和能量消耗变化不大。因此,本文算法在保证网络丢包率和能量消耗基本不增长的前提下,能够提高特殊重要信息传输的实时性。在多机器人无线通信系统中,本文算法比改进的MAC算法有较大的改善。
4结束语
在基于ZigBee的无线传感器网络平台上,对无线传感器网络下多机器人系统通信进行实验,验证了提出的改善信息延迟方法的可行性。将改进MAC协议中的最小竞争窗口值方法和优先级方法相结合,既能减少信息阻塞和高丢包率的发生,同时能有效减少重要信息传输的延迟时间,保证特殊重要信息传输的实时性,提高多机器人控制系统通信的灵活性和可控性。
参考文献:
[1]黄亮,段渭军,王福豹,等.战场地面多任务移动机器人网络系统研究[J].计算机应用研究,2015,32(1):198-201.
[2]王建国.多移动机器人的无线通信的研究[D].合肥:合肥工业大学,2010.
[3]BLANCO B,LIBERAL F,TABOADA I.Suitability of ad hoc routing in WNR:performance evaluation and case studies[J].Ad hoc networks,2013,11(3):1165-1177.
[4]刘云璐,蒲菊华,方维维.一种无线传感器网络MAC协议优化算法[J].计算机学报,2012,35(3):529-539.
[5]薛旭升,马宏伟,尚万峰.煤矿救援无线通信机器人系统设计[J].矿山机械,2015,43(4):104-106.
[6]蒋博斌.基于ZigBee无线传感器网络的MAC层的节能研究[D].上海:上海交通大学,2014.
[7]安媛媛.Ad-hoc网络环境下基于嵌入式Linux平台的视频传输系统设计[D].哈尔滨:哈尔滨理工大学,2015.
[8]鲍凌阁.基于Contiki系统的无线传感器网络MAC层协议研究及实现[D].北京:北京邮电大学,2015.
[9]周威.基于ZigBee的无线抄表系统研究[D].兰州:兰州大学,2012.
[10]刘鑫.基于无线自组网的多移动机器人协作控制研究[D].无锡:江南大学,2014.
[11]周贤娟,付金良,李强.无线传感器网络相关协议-Zigbee研究与应用[J].科技广场,2009(3):32-34.
[12]EEC T,BAJCSY R.Congestion control and fairness for many-to-one routing in sensor networks[C]//Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems(Sensys’04).Baltimore,USA,2004:148-161.
基金项目:河北省自然科学基金项目(F2013202220);天津市科技支撑基金项目(13ZCZDGX01200);天津市“863” 成果转化项目(13RCHZGX01116,14RCHZGX00862)
作者简介:齐春辉(1991-),女,河北唐山人,硕士生;丁承君(1973-),男,通信作者,河北馆陶人,教授,硕士,博士生导师,主要研究方向为移动机器人智能控制和嵌入式计算机系统.
收稿日期:2016-01-24
文章编号:1672-6871(2016)05-0029-04
DOI:10.15926/j.cnki.issn1672-6871.2016.05.007
中图分类号:TP393
文献标志码:A
猜你喜欢
北京航空航天大学学报(2017年12期)2017-04-23
中国科技纵横(2016年21期)2017-02-13
电子技术与软件工程(2016年22期)2016-12-26
艺术科技(2016年9期)2016-11-18
无线互联科技(2015年24期)2016-03-05
铁路通信信号工程技术(2014年5期)2014-02-28
