
飞机编队指控平行仿真系统研究*
2016-08-11 06:19孙黎阳刘晓光
舰船电子工程 2016年4期
陈 淼 孙黎阳 刘晓光
(信息系统工程重点实验室 南京 210007)
飞机编队指控平行仿真系统研究*
陈淼孙黎阳刘晓光
(信息系统工程重点实验室南京210007)
摘要以飞机编队为应用背景,运用平行系统理论,研究飞机编队指控平行仿真系统的构建问题。首先从体系架构的角度分析了单个飞机的组成结构及各部分功能,然后分析了飞机编队平行仿真系统框架结构特征及工作流程,提出了运用多分辨率思想,建立战场实体单元模型,以节省计算资源。最后,详细分析了系统能力需求及关键技术。
关键词平行仿真; 指控; 编队
Class NumberTP391.9
1 引言
作战指挥与控制仿真是当前及今后相当长一段时间内研究的热点,也是世界各国花大力气,投入大量人力物力重点研究的内容[1~4]。作战仿真主要包括建模、环境剧情、仿真推演、信息交互、时统等几方面因素,其中建模是整个仿真过程的基础和关键,传统的建模方法包括运动机理建模、参数化建模、特征描述等,在模型结构及参数确定之后,进行计算运行及信息交互推演,在仿真过程中,模型的结构及参数基本保持不变。但是,对于真实的战场环境来讲,其中的战斗单元实体的参数甚至是模型结构都会随着仿真过程的失衡而发生变化,因此,传统的建模仿真方法难以满足需要。
中科院王飞跃教授2004年提出了平行系统概念及用于研究复杂系统的人工社会(Artificial Societies)、计算实现(Computational Experiments)、平行执行(Parallel Execution)的ACP方法,给该问题的解决提供了新的思路[5]。国防科技大学邱晓刚教授2013将平行系统理念引入军事领域,提出了平行军事体系概念[6~7]。近年来,国内陆续有部分学者开展了平行系统的应用研究[7~10]。平行系统是由某一个自然的真实系统和对应的一个或多个虚拟或理想的人工系统所组成的共同系统,其主要目的是通过实际系统与人工系统的相互连接,对二者之间的行为进行对比和分析,完成对各自未来状况的“借鉴”和“预估”,相应地调节各自的管理与控制方式,达到实施有效解决方案的目的。平行仿真基于系统建模与仿真技术,对真实系统全局或局部进行实时、在线的交互式仿真,生成关键数据,为真实系统的运行、控制、决策等提供支撑。通过平行仿真方法所构建的系统即平行仿真系统,它是基于仿真技术实现的一种人工系统。本文结合飞机编队战场任务执行,研究平行系统在飞机编队指控中的应用。
2 飞机平台构成及工作原理
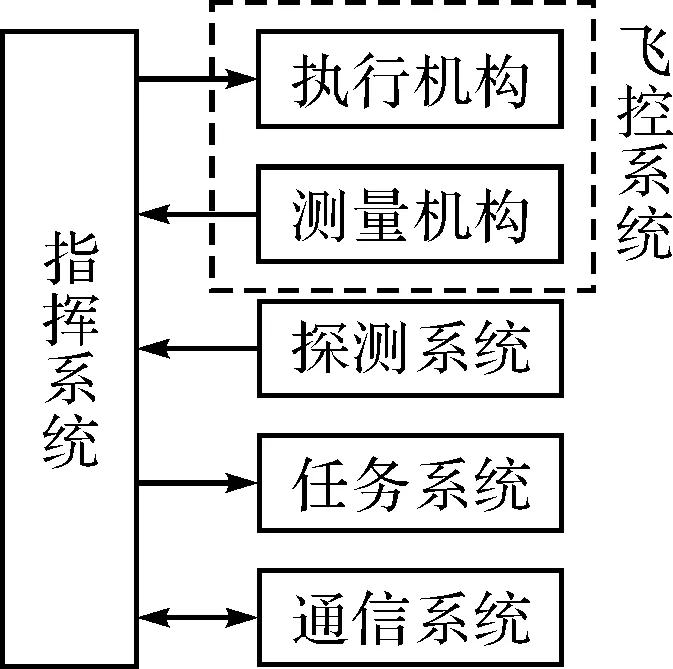
图1 单机平台系统组成
从体系架构的角度来讲,一个实体单元整体架构是由若干功能子模块构成,每一个功能子模块实现一部分功能,各功能子模块之间通过信息交互实现相互配合,共同推动实体单元实现整体综合功能。一架飞机单机平台体系的功能模型如图1所示。
如图,简要地讲,一架飞机单机系统主要由飞控系统、探测系统、任务系统及通信系统等几个功能模块构成,由指控系统统一调度。
1) 飞控系统主要由执行机构和测量机构组成。执行机构用于驱动飞机运动,以固定翼无人机为例,主要包含副翼舵、升降舵、方向舵和油门舵,用来驱动飞机六自由度运动,测量机构是测量飞机运动状态的传感器装置,如陀螺、航向计、大气数据计、GPS等。飞控系统通过指控系统中设计的控制律,构成了飞机运动的基本要素。通俗地讲,在飞机机械系统的基础上,装载了飞控系统之后,才具备运动功能。
2) 探测系统也属于传感器,但并不是用来测量飞机自身的运动状态,而是用来探测战场情报,如各种机载雷达。不仅用来探测战场情报,也给各类攻击武器弹药,如导弹提供指引。
3) 任务系统主要包括攻击单元,如对空、对地导弹及舰炮,电子战装备等。
4) 通信系统包括内部通信系统和外部通信系统,内部通信系统一般指机载指控系统与各功能分系统之间通过不同的接口协议进行信息传输。外部通信系统是指通过机载通信设备,如无线电台等,与战场其它节点之间的数据传输。从复杂战场系统仿真的角度,通信系统多偏向于后者,完整的通信网络包括卫星、数据链路、网络各通信节点等。
3 飞机编队平行仿真结构及特征
平行仿真系统可以认为是指挥信息系统中人脑功能的延续,代替人脑完成复杂繁琐的计算,并且生成较为准确的结果,为指挥决策发挥重要的支撑作用。飞机编队平行仿真概念框架结构如图2所示。
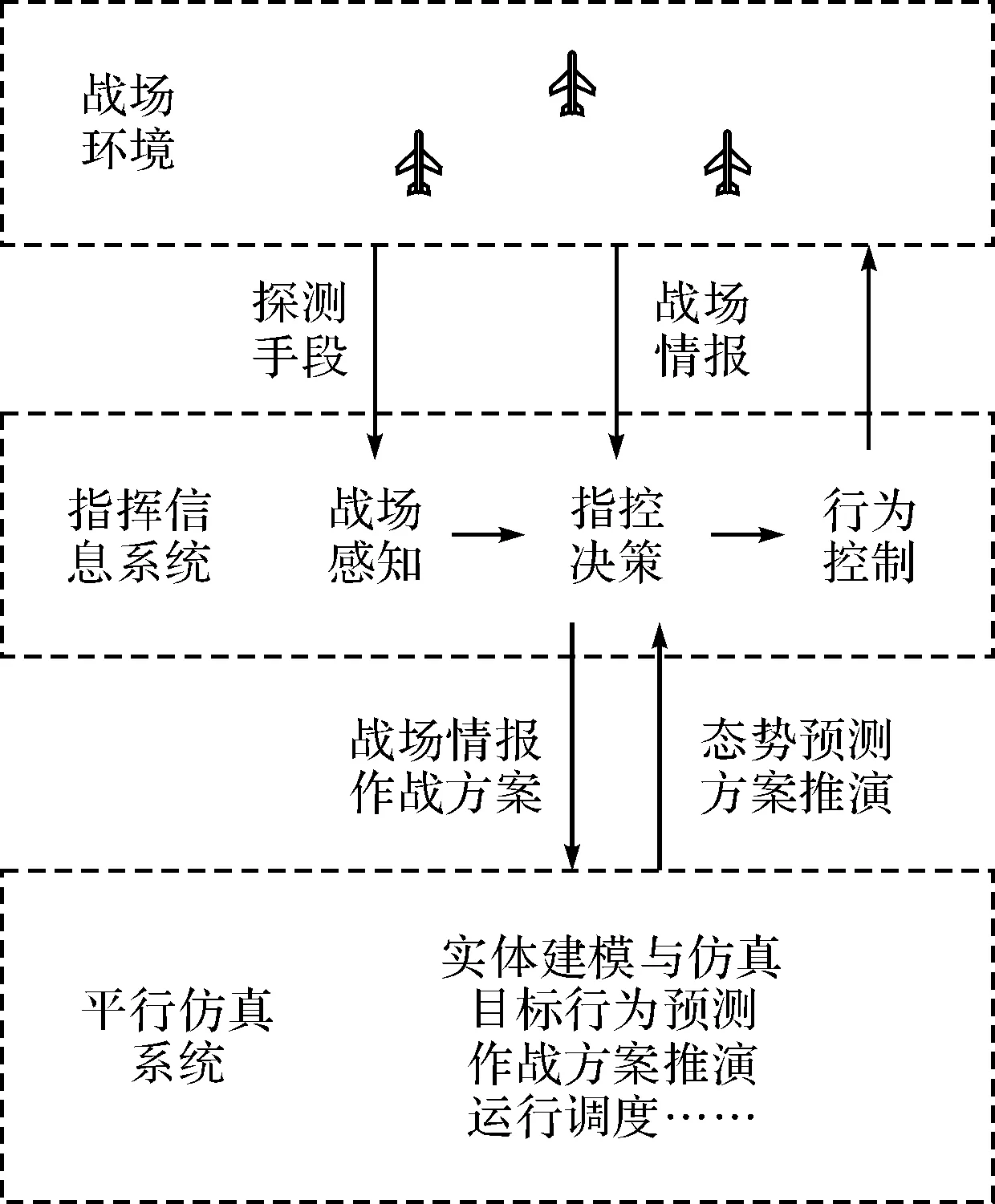
图2 飞机编队平行仿真概念示意图
在传统作战方式下,由战斗单元装备的探测装置,如机载雷达,将探测到的战场情报传回指控中心,指控中心再根据探测手段感知到的战场情报进行综合分析,做出决策,下达指令给作战单元,并实时采集收集作战数据,以供后期学习训练用。这样的指挥模式虽然实现了信息化指挥,但在“指控决策”环节过于依赖指挥员的指挥能力和经验,很大程度上增加了人为因素,增加了战争的不可预见性和未知性,也增加了指挥人员和作战人员的心理压力。而且供学习训练用的作战仿真系统也与实际作战指挥信息系统之间无任何通信,只是把采集保存的作战数据输入仿真系统,进行学习和评估,这样的仿真是静态的、离线的、被动的,而且仿真模型结构和参数是否准确,能否根据战场环境作相应的调整,都是亟待解决的问题。
平行仿真思想的提出解决了这些问题。构建飞机编队平行仿真系统,通过与编队指挥信息系统进行互连及信息交互,不断从指挥信息系统获取战场实时情报及形成的作战方案,建立飞机实体仿真模型及必要的战场其他单元仿真模型,并进行仿真运行,将方案推演结果及生成的下一刻战场态势反馈给指挥信息系统,辅助指挥人员及时准确地形成作战方案,如此循环往复,增加指挥员对战场态势的可预见性及指挥信心,从一定程度上减小心理压力。同时,平行仿真系统通过持续在线学习,及时调整仿真模型的结构及参数,将仿真变为实时在线主动式仿真,使平行仿真系统成为指挥信息系统核心能力的组成部分。
从伺服控制的角度来看,图2所示的平行仿真概念图可简化为两个闭环结构,如图3所示。其中内环是由指挥信息系统中的指挥决策环节与平行仿真系统构成,外环由指挥信息系统与战场环境构成。但是我们要明确,平行仿真与伺服控制本质的不同在于:伺服控制是根据外部环境,给定指令,经过系统计算运行及控制方法的设计,使得整个闭环系统的最终输出能够精确跟踪给定指令,就目前的技术水平,已完全实现自动化,不需要人为参与,只需在回路外给定指令即可,如飞机的航向及飞行高度的控制;而指挥信息系统及平行仿真系统的构建目的是为了形成决策应对战场环境的变化,是复杂的离散的非线性的计算,需要人在回路形成决策。因此,二者之间主要是规模上的区别,对于装备级模型,可从伺服控制角度建构实体单元运动模型,而对系统,需从多方面多角度去描述,这也涉及多分辨率建模的问题。

图3 平行系统伺服结构
编队平行仿真系统工作过程主要通过以下四个过程实现:
1) 从指挥信息系统获取实时情报。平行系统输入信息来源于实际指挥信息系统,而不是从战场探测感知。指挥信息系统从战场获得情报后需进行数据处理,再传给平行系统,是为了保证平行系统消除受噪声数据的影响,能够建立较为准确的模型。
2) 平行系统根据情报数据建立模型之后,计算并预测战场各实体单元下一时间的行为和状态,将预测结果反馈给指挥信息系统,供决策参考。
3) 从指挥信息系统获取作战预方案。作战预方案是由指挥信息系统中指控决策环节形成,在无平行系统辅助情况下,该作战方案受指挥员主观经验影响较大,增加了对抗结果的不确定性,从而增加了指挥员的心理压力。
4) 平行仿真系统根据对战场各实体单元行为状态的预测,结合作战预方案,进行模拟推演,将推演结果反馈给指挥信息系统,辅助指挥员做出决策。
4 能力需求及关键技术
通过以上分析可以看出,平行仿真系统具有动态演化、双向交互及超实时计算特性。首先,平行仿真系统与传统意义上的仿真验证系统不同,传统的仿真验证系统是通过理论分析方法建立系统模型,模型参数离线调试,而且与实际系统并不是同时运行,多数情况下是在实际系统运行之前进行的可行性分析,如飞行器的地面半物理仿真试验。而实际系统在运行过程中,参数是变化的,平行系统需通过平行执行和对模型及参数进行修正调整,逐步逼近实际系统。其次,平行系统从实际指挥信息系统获取战场情报及作战方案,通过建模推演运行,将预测结果反馈给实际系统,即平行系统与实际系统需实时进行数据双向交互。然后,平行系统从实际系统获取战场情报及作战方案,包含敌我双方所有战斗单元的数据及指挥员作战方案布置,包含了大量的数据,为保证实时的决策支持,平行系统需具备超实时计算与仿真能力。
4.1战场实体多分辨率建模
前文提到系统多分辨率建模的问题,本文关键技术在于战场实体及各系统建模。采用多分辨率建模方式,是最易于想到的方法,对战场实体单元,采取运动学模型,预测实体的运动意向及目的;对于系统,则需详细描述各项功能。但有一点需要注意的是,从战场环境中感知来的敌方实体单元,我们并不知道其运动模型,或者难以获得其详细的运动模型参数,能获得的只有其运动参数及外在属性,如高度、速度、航向,以及物体外形尺寸特征等,这时候还需要借助于识别技术,并且与模型库中相应模型选项进行匹配,以获得敌方实体的属性。
4.2战场实体模型修正
前文指出,平行仿真系统功能之一是预测战场实体运动趋势或行为态势,以辅助指挥人员做出决策。但问题是,仿真系统输出的模型态势数据与实际战场实体运动数据是否一致,这就需要通过比较分析相同时间段内的实际战场实体单元数据及仿真系统推算数据,对平行仿真系统构建的模型结构或参数进行修正,即模型动态修正技术。
5 结语
本文在平行理论的基础上,结合无人机编队作战,论述了无人机编队系统决策支持的平行仿真方法,详细分析了无人机编队平行仿真系统结构、工作流程、信息交互、能力需求及关键技术等内容,为平行仿真方法的应用进行了探索。
参 考 文 献
[1] 李京伟.多分辨率建模在航母战斗群作战仿真中的应用研究[J].系统仿真学报,2013,25(8):1924-1929.
[2] 杨慧杰.基于战斗队形的坦克连多分辨率建模方法研究[J].中国电子科学研究院学报,2013,8(2):134-137.
[3] 陈天立,周超,周绍磊,等.面向协同突防的无人飞行器自动编队控制[J].电光与控制,2014,21(5):58-62.
[4] 毛少杰,李玉萍,林剑柠,等.网络中心化仿真概念与方法研究[J].系统仿真学报,2010,22(7):1660-1663.
[5] 王飞跃.平行系统方法与复杂系统的管理与控制[J].控制与决策,2004,19(5):485-489.
[6] 邱晓刚,张志雄.通过计算透视战争:平行军事体系[J].国防科技,2013,34(3):13-17.
[7] 孙黎阳,楚威,毛少杰,等.面向C4ISR系统决策支持的平行仿真框架[J].指控信息系统与技术,2015,33(6):56-61.
[8] 郭刚,陈彬,邱晓刚.平行系统的人工环境构建技术[J].系统仿真学报,2011,23(8):1686-1690.
[9] 贺平,罗小明,李晰.电子蓝军装备综合演练运筹分析及其平行系统构建[J].装备学院学报,2013,24(5):125-130.
[10] 杨俊,范丽,明德祥,等.卫星导航地面试验验证的平行系统方法[J].宇航学报,2015,36(2):165-172.
*收稿日期:2015年10月7日,修回日期:2015年11月24日
作者简介:陈淼,男,工程师,研究方向:复杂系统建模仿真与效能评估。孙黎阳,男,工程师,研究方向:网络化建模与仿真。刘晓光,男,高级工程师,研究方向:指控系统仿真。
中图分类号TP391.9
DOI:10.3969/j.issn.1672-9730.2016.04.024
Parallel Simulation System for Aircraft Formation
CHEN MiaoSUN LiyangLIU Xiaoguang
(Science and Technology on Information Systems Engineering Laboratory, Nanjing210007)
AbstractThe problem of parallel system for command and control system of aircraft formation is studied in this paper, and the necessity of parallel system theory used on aircraft formation of is discussed as well. Firstly, all of each composition part and its function of single aircraft are analyzed in terms of system architecture. Then, the frame construction and workflow of parallel simulation system is also analyzed. Furthermore, the method of using multi-resolution theory for modeling of entity unit from battlefield is presented in this paper, which can economize computing resource. Finally, the capability requirement and key technology of parallel system is analyzed as well.
Key Wordsparallel simulation, command and control, aircraft formation
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
中国外汇(2019年17期)2019-11-16
国防(2018年5期)2018-07-19
军事运筹与系统工程(2018年3期)2018-03-26
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2016年7期)2016-11-16
环球时报(2010-02-20)2010-02-20
航空知识(2001年5期)2001-06-12
