
基于观测器的蒸汽发生器水位模型预测控制*
2016-08-11 06:24孙建华
舰船电子工程 2016年4期
龚 娴 孙建华 邹 海
(武汉第二船舶设计研究所 武汉 430205)
基于观测器的蒸汽发生器水位模型预测控制*
龚娴孙建华邹海
(武汉第二船舶设计研究所武汉430205)
摘要目前对蒸汽发生器(SG)水位的控制以串级PID控制为主,在高功率段能够很好地满足控制要求,在低功率段其控制性能还有提高空间。文中基于SG水位线性变参数(LPV)模型,采用线性矩阵不等式(LMIs)方法设计了具有混合H2/H∞性能的基于观测器的SG水位模型预测控制(MPC)系统。用H2来评价系统的最优性能,用H∞来评价系统的鲁棒性,使系统同时获得良好的控制性能和鲁棒性。仿真结果显示该文设计的控制系统在低功率段调节时间较短。
关键词蒸汽发生器; 水位控制; 模型预测; H2/H∞
Class Number
1 引言
蒸汽发生器(SG)水位系统是一个复杂的动态过程,具有非线性、非最小相位、强干扰、虚假水位等特点。鲁建梁[1]等设计了SG水位PID智能模糊自整定控制器;宋梅村[2]、腾树杰[3]等设计了SG水位模糊自适应控制;李凤宇[4]将遗传算法应用于SG水位控制;董子亮[5]基于PID和H∞控制方法设计了SG水位控制器。这些方法在高功率段都能有效控制SG水位,但在低功率段还有提升空间。文中设计了基于观测器的SG水位H2/H∞模型预测控制器以提高低功率段SG水位控制的动态响应特性。
2 基于观测器的H2/H∞模型预测控制系统设计
本文采用文献[6]的SG水位LPV模型,LPV模型如式(1)所述:
(1)
其中A∈B5×5,Bi∈R5×1,且A、Bi的值与功率相关,带入文献[7]在5%≤p≤15%低功率段的运行参数可得:

系统的输入约束和状态约束分别为

(2)

(3)
式中fl表示水位限定值,dg表示给水流量限定值。

(4)
然后对系统(1)和观测器(4)做如下考虑:
1)当扰动ω(k)=0时,式(1)描述的闭环系统是稳定的。

(5)
3)H2性能要求:控制输出z(k)的2范数满足式(6)成立:

(6)
如果以上三个条件都满足了,那么就称控制系统(1)~(4)是满足H2/H∞性能指标的闭环稳定系统。
3 基于观测器的H2/H∞模型预测控制系统设计
本文采用LMI计算方法,对系统描述式(1)~(6),先给出满足约束条件和性能指标的LMIs,再优化求解LMIs。
x(k+1)=A(p)x(k)+B1(p)ω(k)+B2(p)u(k)
+B1(p)ω(k)
(7)

(8)
(9)
1)系统的稳定性
利用Lyapunov函数对控制系统进行稳定性分析,采用多步控制策略设计的Lyapunov二次函数形式为:V(x(k+i))=xT(k+i)Pix(k+i),对式(1)描述的闭环系统,为了保证闭环稳定性,需要满足的条件为
ΔV=V(k+i+1)-V(k+i)<0
(10)
2)系统的递归可行性
必须保证状态x(k+i)始终处于椭圆集{xT(k+i)Q-1x(k+i)≤1}内才能满足系统的递归可行性要求。当k+i时刻的状态x(k+i)处于集合内,要保证k+i+1时刻的状态x(k+i+1)也处于椭圆集{xT(k+i+1)Q-1x(k+i+1)≤1}内,则要求式(11)成立:
xT(k+i+1)Q-1x(k+i+1)≤
xT(k+i)Q-1x(k+i)≤1
(11)
利用文献[8]中定理2.2、定理2.4和Schur补定理[4],对式(1)~式(11)进行推导可得,使系统满足约束条件且稳定可行,同时又具有H2/H∞混合性能的LIMs条件为
(12)

(13)
(14)
(15)

(16)


4 系统仿真
构建Simulink模块,并做蒸汽扰动仿真实验。仿真模块示意图如图1所示。
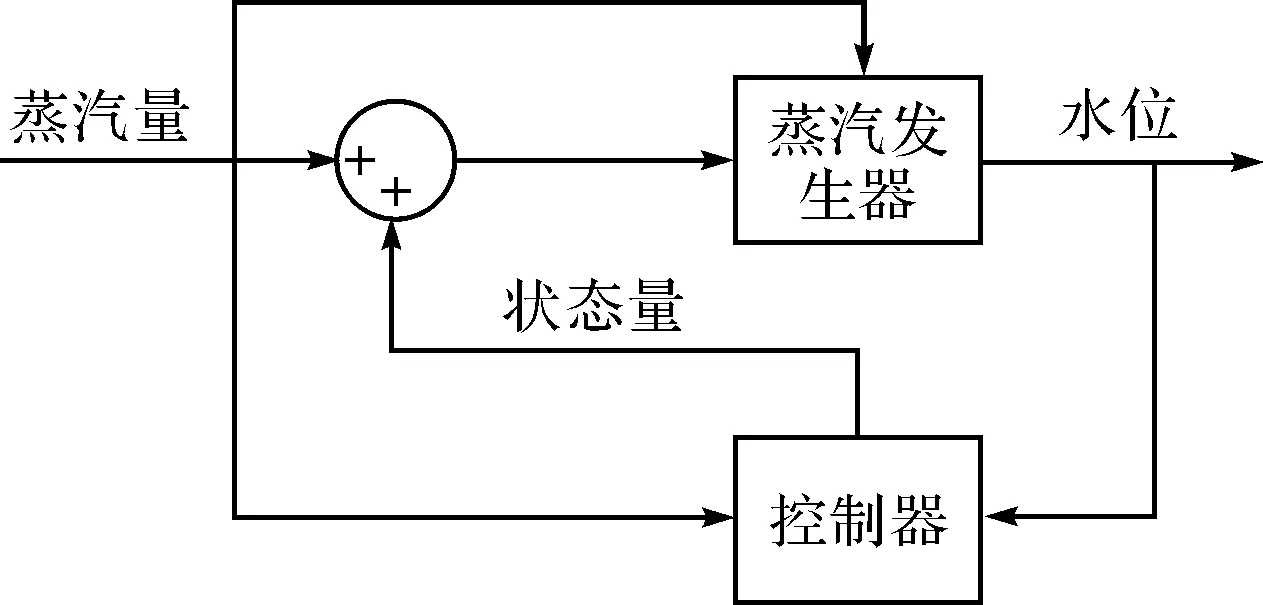
图1 H2/H∞模型预测控制系统仿真模块
在5%≤p≤15%低功率段进行仿真试验,仿真条件为:仿真时间500s;在k=50s时蒸汽扰动信号阶跃增加30kg/s。闭环系统的水位响应曲线如图2所示。

图2 H2/H∞模型预测控制系统水位响应
对比图2与相同仿真条件下的单PID和串级PID控制系统[2]在5%≤p≤15%低功率段水位响应,图2的调节时间约200s,相同参数与仿真条件下,文献[7]的调节时间约为400s,可见文中设计的控制系统在5%≤p≤15%低功率段水位响应时间缩短了近一半。
5 结语
文中设计的基于观测器的SG水位H2/H∞模型预测控制系统,同时具有较好控制性能和鲁棒性,可以提高低功率段水位响应动态特性,对工程应用具有一定的参考价值。
参 考 文 献
[1] 鲁建梁,张广福.PID智能模糊自整定控制器在SG水位控制中的应用[J].船海工程,2007,42(4):131-133.
[2] 宋梅村,张宇声.蒸汽发生器水位的模糊自适应PID控制[J].船海工程,2007,42(5):55-58.
[3] 腾树杰,张乃尧,崔震华.核动力装置蒸汽发生器水位的分层模糊自适应控制[J].控制与决策,2002,17(6):933-936.
[4] 李凤宇,张大发,王少明,崔长领,刘颖.基于遗传算法的蒸发器水位PID控制研究[J].原子能科学技术,2008,82(S1):137-141.
[5] 董子亮.基于PID和H∞控制方法的蒸汽发生器水位控制[D].哈尔滨:哈尔滨工程大学,2009:33-35.
[6] Ke Hu, Jingqi Yuan. Multi-model Predictive Control Method for Generator Water Level[J]. Energy Conversion and Management,2007,49(10):1167-1174.
[7] 刘春容.蒸汽发生器水位模型预测控制方法研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2013:37-41.
[8] 黄鹤.混合H2/H∞指标鲁棒模型预测控制器的设计[D].上海:上海交通大学博士学位论文,2011:12,17-25.
[9] Khargonekar P. MixedH2andH∞Control: a Convex Optimization Approach[J]. IEEE Transactions on Automatic Control,1991,36(7):824-837.
[10] 俞力.鲁棒控制—线性矩阵不等式处理方法[M].北京:清华大学出版社,2002:6-22,241-269.
*收稿日期:2015年10月18日,修回日期:2015年11月20日
作者简介:龚娴,女,硕士研究生,研究方向:核动力装置仿真与控制。孙建华,男,硕士,研究员,研究方向:核动力装置控制技术、系统工程等。邹海,男,博士,高级工程师,研究方向:核动力装置控制技术等。
中图分类号TP391
DOI:10.3969/j.issn.1672-9730.2016.04.030
Model Predictive Control of Steam Generator Water Level Based on Observer
GONG XianSUN JianhuaZOU Hai
(Wuhan 2ndShip Design and Research Institute, Wuhan430205)
AbstractCurrently, cascade PID control is the main method of steam generator (SG) water level control. It can meet the control requirements in high power plant, but the control performance can be improved in lower power plant. On base of the linear parameter varying model of SG water level system, the H2/H∞model predictive control system based on the observer is designed by using LIMs method in the paper. H2 and H∞are used to estimate the control and robust performance. Therefore, the control system can gain favorable performance both on control and robust. The simulation result shows that the accommodation time of the control system designed in this article is short at low power level.
Key Wordssteam generator, water level control, model predictive, H2/H∞
