不同舵速对船舶回转性能影响理论与试验分析
2016-08-11 04:00王五桂
船电技术 2016年7期
王五桂
(中国舰船研究设计中心,武汉 430064)
不同舵速对船舶回转性能影响理论与试验分析
王五桂
(中国舰船研究设计中心,武汉 430064)
为分析不同舵速对船舶回转性能的影响,采用理论仿真和模型试验相结合的方法,基于流体力学和船舶操纵性基本理论,建立三自由船舶运动模型,对模型进行仿真验证。通过构建自航模试验系统,进行不同舵速下的自航模试验,理论与试验结果表明:不同舵速对战术直径、定常回转直径和横距无明显影响,但对纵距影响较明显。
舵速 回转性能 数值仿真 自航模试验
0 引言
船舶回转性能与避让、靠离泊、灵活掉头等操纵密切相关,在船舶设计的不同阶段研究船舶回转性能都具有重要的意义[1]。舵是船舶不可缺少的控制装置,用以船舶的航向保持与转向操纵[2]。文献[3]针对传统舵机舵速响应较慢的情况下,提出一种适应于航向控制低速舵机的舵/ 鳍联合减摇方法,达到了无需对已有舵机进行改造或更换便可实现横摇减摇的目的。文献[4]从减振降噪的角度,提出一种低舵速操舵控制技术,并通过数字仿真,验证了此种操舵控制技术的可行性和有效性。文献[5]通过仿真研究探讨了通过提高船的转舵速度来提高船的操纵性能的可行性。
本文采用理论仿真和模型试验相结合的手段,分析不同舵速对船舶回转性能的影响。理论分析基于流体力学和船舶操纵性基本理论和方法,建立三自由船舶运动模型,通过理论分析和数值计算等方法,获取相关水动力系数,在此基础上进行不同舵速对船舶回转性能的仿真研究。同时,设计自航模试验系统,开展模型试验研究,进行不同舵速对船舶回转性能的试验研究。通过对理论仿真结果和模型试验结果进行分析,总结不同舵速对船舶回转运动性能的影响规律。
1船舶三自由度运动建模
根据MMG分离建模的思想,运动坐标系的坐标原点取在船舶重心处,假定运动坐标轴为惯性主轴,将作用于运动船舶上的力分解为船体力、螺旋桨力、舵力,建立的船舶三自由度运动数学模型为[6]
1)船体水动力建模
航行中的船舶所受到的水动力或力矩可以表示为如下形式:

对上式进行泰勒展开及相应的简化后得到:
2)推进力及力矩建模
船舶航行时,螺旋桨的推力是主控力,用来克服水的阻力,维持船舶的操纵运动。螺旋桨产生的推进和转矩与桨的直径、转速、进速、水的密度、水的粘性系数和重力加速度等有关。一般可表示为:
3)舵产生的控制力及力矩建模
根据船舶运动控制原理,舵提供在船舶横剖面内的控制力,一般可表示为:
上述所建立的模型涉及的水动力系数可通过计算流体力学(CFD)、船模试验或经验公式得到,关于水动力系数的估算方法参见文献[1],也可通神经网络等算法对模型中水动力参数进行辨识得到[7]。
2 船模试验构架设计
自航模试验是船舶操纵性能预报的有效手段之一,也是进行操纵性设计优劣和计算结果验证的方法[8]。采用自航模试验方法验证不同舵速下对船舶回转性能的影响,试验水池长 80 m,宽60 m,水深 1.5 m。船模缩尺比为1:33,模型为木质,表面油漆、抛光。舵为铝合金质,根据实船所用舵按缩尺比加工制作及安装。
1)试验设备
a)船模重心运动轨迹测量:船模重心运动轨迹的测量采用带基准站的双频RTK-GPS定位系统,定位精度为平面椭圆误差不大于2 cm。
b)船模航行姿态测量:采用姿态方位组合导航系统,精度为:船模水平面方位角测量误差不大于0.1°;船模姿态角测量误差不大于0.2°。
c)运动控制设备:试验船模的运动控制设备采用数字式位置控制方式,舵角的位置精度为0.1°,主机的转速精度为5r/min。
2)试验准备
a)船模与试验设备的安装:根据图纸文件,完成模型安装,包括:水线绘制、舭龙骨、轴托架、舵的准确定位和安装;安装试验设备时,应和模型状态的调试同步进行,需要兼顾船模重心的位置。
b)船模状态校验:利用浮态观察对船模重心横向位置和纵向位置进行校验;利用倾斜试验对船模重心高度进行校验;采用空气中的扭摆周期方法对船模转动惯量进行校验。
3)试验内容
a)船模航速:2.495 m/s和1.604 m/s,(对应实船航速分别为 28 kn,Fn=0.386和 18 kn,Fn=0.248)。
b)回转舵角:±20°和±35°。
c)执行舵速:船模转舵65度需要的时间分别为4.8s,2.4s和1.2s,对应实船转舵速度为一舷35度至另一舷30度所需时间为28 s,14 s,7 s。
3理论分析
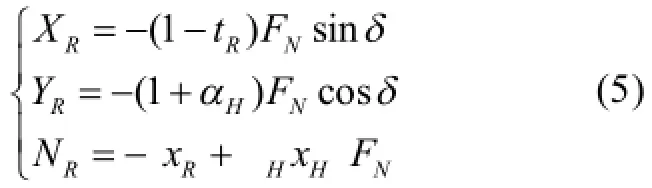
为了验证所建立的船舶三自由度运动模型的有效性,以某通用船模为研究对象,基于Matlab进行不同舵速下对船舶回转性能影响理论分析。仿真船速为:28 kn、18 kn;舵速为一舷35°至另一舷30°所需时间为28 s,14 s,7 s,5 s。图1 和2分别给出了航速28 kn和18 kn时不同转舵速度操纵运动仿真结果。
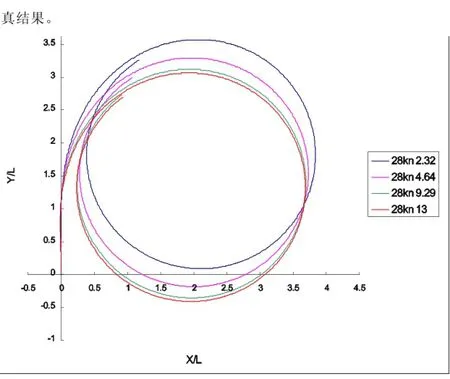
图1 28km不同转舵速度回转运动仿真结果
根据上述回转运动仿真轨迹可以看出,船舶的定常回转直径随着转舵速度的改变基本没有变化,反横距值本身范围过小,因而舵速改变对这一特征值的影响不易考察。转舵速度对纵距影响较明显,当转舵速度增至7s转65度后,转舵速度对纵距影响程度不明显。
4 试验结果分析
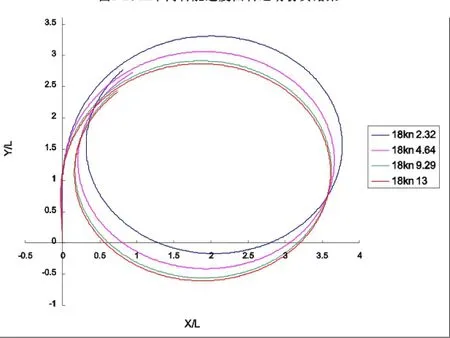
为了验证仿真结果的有效性,根据所构建的自航模试验系统,根据试验内容,进行不同舵速下对船舶回转性能影响自航模试验。限于篇幅,这里只给出了航速为 2.495m/s,转舵 65度 2.4s 下+35°的回转试验结果和航速为1.604m/s,转舵65度2.4s下+35°的回转试验结果,如图3和图4所示:
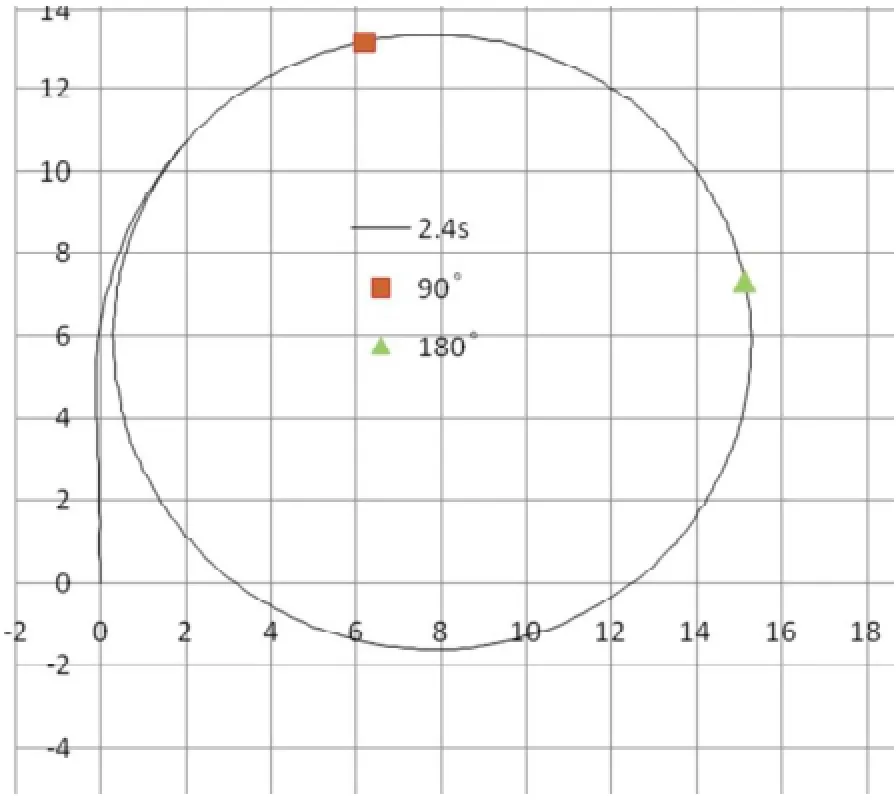
图3 航速为2.495m/s时试验结果
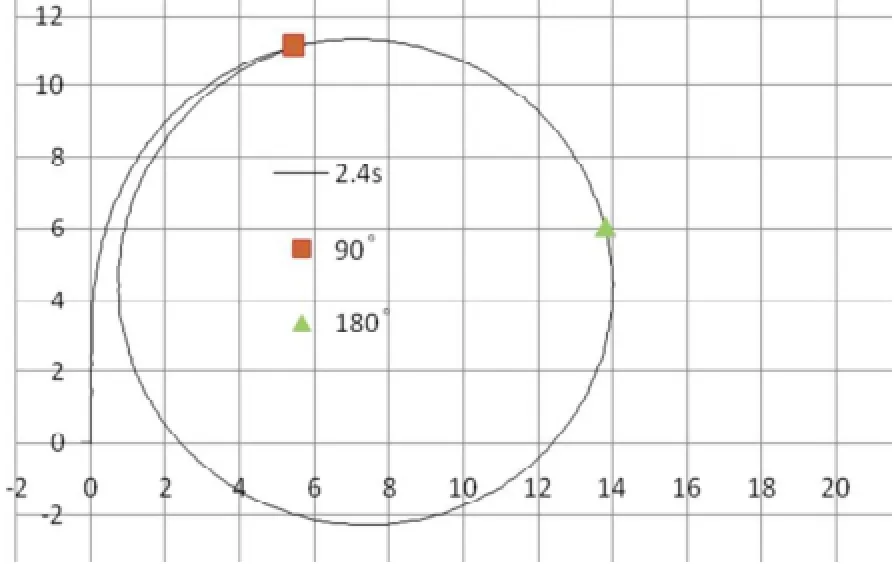
图4 航速为1.604m/s时试验结果
根据试验数据进行分析,转舵速度的变化对战术直径、定常回转直径无明显影响,考虑到试验过程中的设备误差以及环境干扰,转舵速度对回转直径以及横距影响并不明显。但纵距随转舵速度的增加而减小,随着转舵速度提高,对纵距的影响也随之减少,图5给出了不同转舵速度下对纵距的影响试验结果。试验结果和理论仿真结果一致,说明所得到的结论能够有效支撑对船舶操纵性研究。根据试验数据分析,18 kn工况下,转舵速度对纵距影响具体数值情况如下:1)转舵65度 4.8 s至耗时 2.4 s 纵距降低的范围为3%-8%;2)转舵65度2.4 s至耗时1.2 s 纵距基本没有变化。
28 kn工况下:1)转舵65度4.8 s至耗时2.4 s 纵距降低的范围为5%-15%;2)转舵65度2.4 s至耗时1.2 s 纵距基本没有变化。
4 结语
本文主要针对不同转舵速度下对船舶回转运动性能进行数值计算及模型试验研究。数值计算主要通过建立船舶三自由度运动数学模型,运用计算机仿真方法分析不同转舵速度对船舶回转运动能的影响;模型试验主要是通过制作试验用模型,开展不同转舵速度下船舶回转性能试验,根据试验结果来分析不同转舵速度下船舶回转性能的变化规律。根据理论仿真结果和模型试验结果可知,不同转舵速度对战术直径、定常回转直径和横距无明显影响,但纵距随转舵速度的增加而减小,随着转舵速度提高,对纵距的影响也随之减少。理论仿真结果和模型试验结果一致。
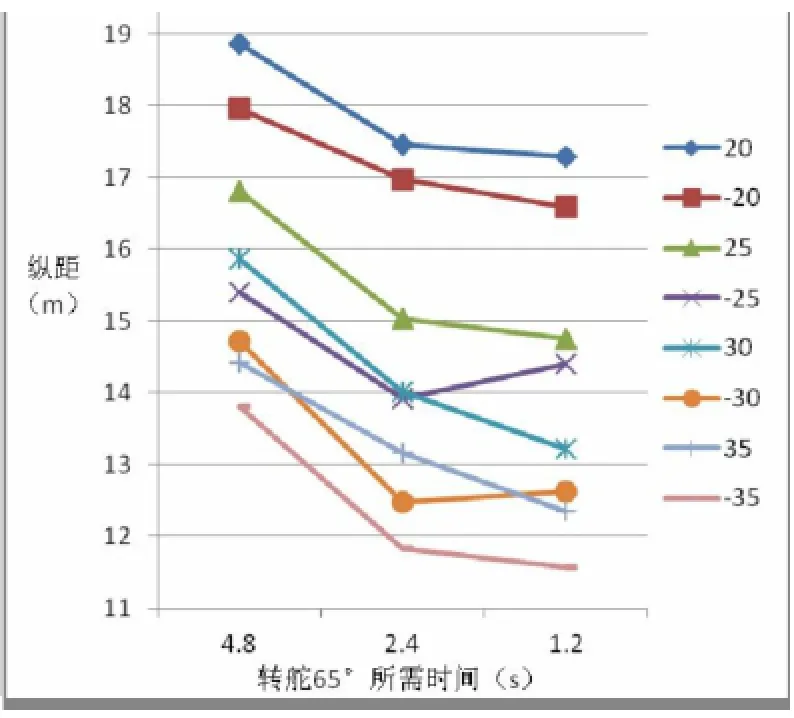
图7不同转舵速度对纵距影响试验结果
[1]贾欣乐. 船舶运动数学模型—机理建模与辨识建模版[M]. 大连: 大连海事大学出版社, 1999: 23-36.
[2]金鸿章, 姚绪梁. 船舶控制原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2001: 38- 71.
[3]金鸿章, 王帆. 低舵速下具有能量优化的舵鳍联合减摇研究[J]. 兵工学报, 2009, 30 (7): 945-950.
[4]王令蓉. 低舵速操舵控制技术研究[J]. 船电技术,2011, 31 (6): 21-24.
[5]刘 伟, 许 晟, 王永宁,等. 转舵速度对船舶操纵性影响研究[J]. 中国水运, 2014, 14 (2): 1-3.
[6]陈重阳, 马曲立, 李海林,等. 船舶横稳性高对操纵运动影响的四自由度仿真[J]. 海军工程大学学报,2013, 25 (5): 101-112.
[7]李春风,白舒毓,林龙. 基于神经网络的舰船运动模型辨识[J]. 中国舰船研究, 2012, 7 (5): 60-65.
[8]苏 威. VLCC波浪中操纵性数值预报与自航模试验验证[J]. 中国造船, 2012, 53 (3): 9-17.
Analysis of Theory and Experiment for Ship' s Turning Effects Under Different Rudder Speed
Wang Wugui
(China Ship Development and Design Center, Wuhan 430064, China)
To analyze the ship's turning effects under different rudder speed, a method including the theory and the experiment is developed. Based on fluid mechanics and manoeuvrability theory, 3-DOF ship motion equation is established, and then the simulation approach is validated for motion equation. The free running model experiments are proceeded by constructing experiment system. Numerical and experimental results indicate that there is non-obviously effects on tantical diameter, steady diameter and transfer under different rudder speed. However the advance decreases with the rise of rudder speed.
rudder speed; turning effect; numerical simulation; free running model experiment
U675.9
A
1003-4862(2016)07-0001-04
2016-02-15
王五桂(1985-),男, 博士。研究方向:船舶航行操纵控制技术。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
船舶标准化工程师(2019年4期)2019-07-24
儿童故事画报·自然探秘(2017年3期)2017-06-29
中国船检(2017年3期)2017-05-18
舰船科学技术(2016年1期)2016-02-27
语文世界(小学版)(2014年3期)2014-08-02
中国舰船研究(2012年1期)2012-11-09
小学生导刊(中年级)(2007年5期)2007-07-03