一种基于自主航行的无人水面测量船的研制
2016-08-16 08:42马诗聪刘吉桃
江苏船舶 2016年3期
马诗聪 ,刘吉桃
(1.中国地质大学 机械与电子信息学院,湖北 武汉 430074;2.武汉劳雷绿湾船舶科技有限公司,湖北 武汉 430073)
一种基于自主航行的无人水面测量船的研制
马诗聪1,刘吉桃2
(1.中国地质大学 机械与电子信息学院,湖北 武汉 430074;2.武汉劳雷绿湾船舶科技有限公司,湖北 武汉 430073)
研制了一种用于河流、湖泊、浅水、近滩自主航行的无人水面测量系统。该系统可搭载多种传感器,包括声学多普勒流速剖面仪ADCP、单波束测深仪、声纳等。其组成包括岸基(母船)控制单元和无人水面测量单元,其中岸基控制单元利用无线网桥通信遥控测量船自主航行或走航测量并实时接收测量数据,无人水面测量单元搭载差分GPS、惯性导航系统、单波束测深仪、摄像头和数据交换工控系统。目前已经过多次湖试,验证了无人水面测量船用于水下测量、水质采样的可行性和实用性。
无人船;水面测量船;自主航行;差分GPS;惯性导航单元
0 引言
无人测量船是一种多用途的测量平台,可搭载多种测量传感器用于相关的测量,并且运输简单,携带方便。无人测量的方式在内河及海洋将成为测绘行业的重要技术手段,实时、无人、自动测量、自主定位、自主导航是现代内河及海洋测量的一种现代化趋势。近几年,我国在无人船领域方面获得了重大的发展[1]。例如珠海云洲智能科技有限公司研发了一款型号为ME70中型自动测量船包括单波束测深仪系统、 侧扫声纳系统、双频GPS及姿态仪系统,同时还有用于船载数据采集备份的平板工控机和用于测量数据实时传输的数传电台,以及搭载有地貌测绘软件的地面测量基站,但其自主测量采用的电子罗盘容易受到地磁干扰而丢失测量数据;通信采用电台通信,受距离限制,传输带宽低。国家海洋局研发一款双体测量船用于水深测量。国外麻省理工研发了一款名为SCOUT用于水声通讯中继任务[2]。波尔图大学研发了一款名为ZARCO用于水下调查,并进行了相关试验[3]。
本文研制一款具有自动驾驶功能的测量船,其智能运动控制系统总体目标为:操作员通过基站设定航行任务,相关执行器根据航线信息和差分GPS或北斗位置,惯导的姿态、航向、方位等位置信息,实时计算出航线跟踪所需要的航向角和航速,并解算出所需的舵角,沿着事先设定的路径航行。另一方面,实时计算出航速,通过加速度传感器实现航速的控制,并实时对电机的转速、电池电量进行实时监控;把摄像机图像信息及相关的测量仪器通过无线通信实时传输给基站,供监控人员进行作业监控和航线更改[4-5]。
1 系统结构
研制的自主航行的无人水面测量船主要由岸基控制系统和船载动力系统构成,这两部分采用无线网桥进行通信与控制。系统框架图如图1所示。
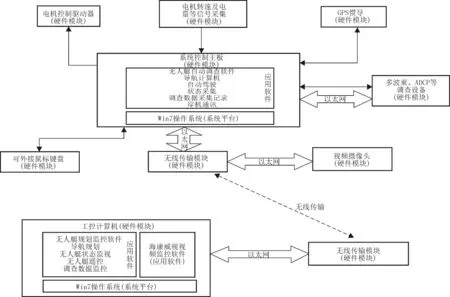
图1 无人水面测量船系统框架图
无人水面测量艇系统除了艇身结构与动力系统外,还配有定位惯导传感器、光学摄像头、多波束等测量设备、采集导航与控制通讯系统,可以实现自主航行、调查采集与记录功能,并具备与岸机通讯实时回传数据、修改航迹与遥控航行等功能。岸机系统主要为1台配备无线收发模块的工控机算机,用于实现无人艇作业前的规划设计、无人艇作业期间的实时状态、调查数据监视以及无人艇的航行遥控。
2 无人水面测量艇船体构成
无人水面测量艇上件采用不锈钢材质滚床而成,双浮体采用高分子聚尿合成,具有抗压、耐磨、浮力大等特点。双浮体支架采用铝合金安装支架,可拆卸,可折叠,方便安装运输。动力采用推进器为2台DC24 V直流无刷电机,功率分别为500 W,共1 000 W。驱动器为配套直流无刷控制器,输出信号为0~5 V电压信号,2套驱动器分别控制2套直流无刷电机,可实现差动转向。当左驱动器的电压信号大于右驱动器的电压时,左直流无刷电机的转速快于右直流无刷电机,此时船体向右转向;反之,船体向左转向。当左直流无刷电机与右直流无刷电机的驱动信号一致时,船体向正前方向推进。船体的主要性能参数见表1,船体的主要构成如图2所示。

表1 无人水面测量船的主要参数
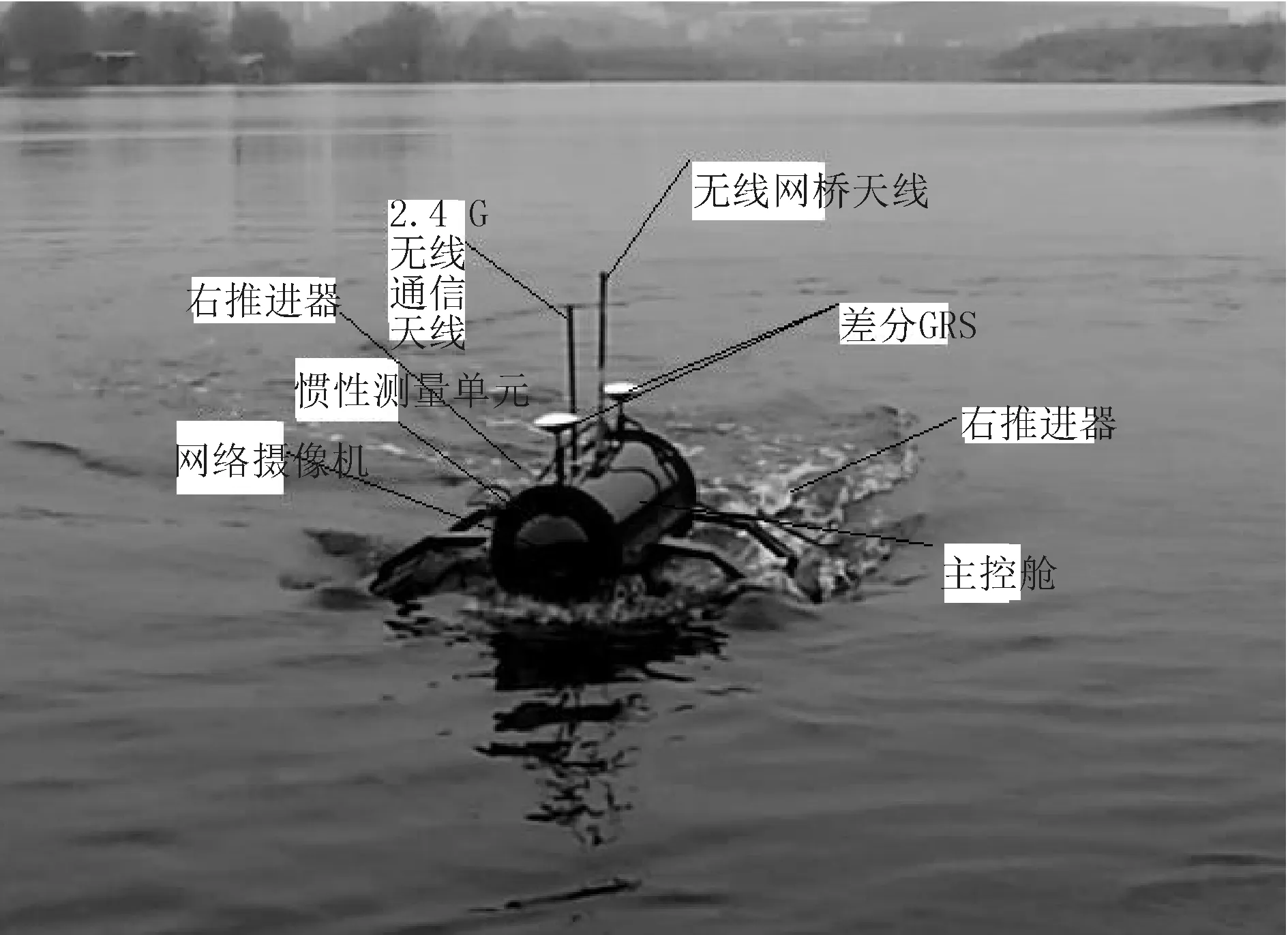
图2 无人水面测量船船体构成
主控舱包含中央控制器、工控主机、驱动器、磷酸铁锂电池、无线网桥传输组件和惯性导航单元主机。惯性导航单元以MEMS惯性测姿技术为基础,融入高精度卫星RTK定位及定向技术,搭载全新一代MEMS惯性/高精度卫星组合导航算法引擎,可有效解决动态车辆在复杂环境下的高精度位置和航姿测量难题,大大提高了卫星导航抗多路径干扰的能力。同时,由于与里程计相结合,即使卫星信号受到遮挡或一段时间内没有卫星定位信号,也能保证其有较好的位置精度。其相关参数见表2。
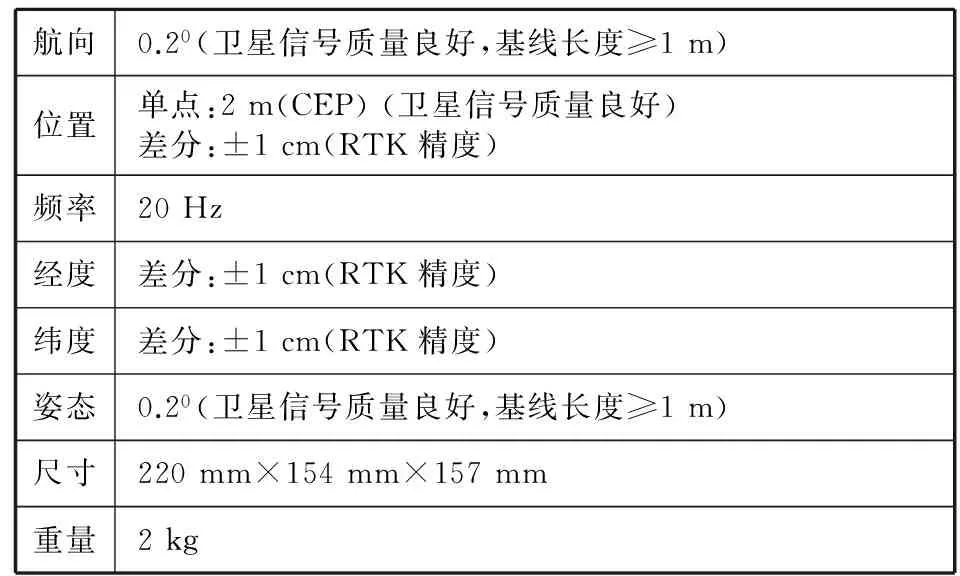
表2 惯性导航单元主要参数
无线网桥通信采用美国UBNT全新原装进口Bullet M5 HP大功率600 mW,5.8 G 802.11a/n,内存32 M,CPU Atheros 400 MHZ,POE网线供电,RJ45以太网接口,无线带宽可达到100 M以上,可以完全满足工控机的数据传输以及高清网络摄像头的实时传输。岸基控制系统将相关的遥控指令或者路径规划指令通过岸基无线网桥发射端发送到船端的无线网桥的接收端,无线网桥接收端将接收到的指令传送到船端工控计算机。工控计算机将相关指令发送到相关的执行机构,完成船体的相关的自主航行与自主测量。
3 无人水面测量船地面站岸基控制系统
无人水面测量船岸地面站岸基控制系统主要包括地面站工控计算机、地面站控制软件、地面站岸基无线网桥发射端、手持遥控器、锂电池及逆变电源。
3.1地面站工控计算机
地面站工控计算机FieldGo M9X是一个加固性Intel Xeon的便携式计算机多平台便携式工作站,集成了先进的计算机组件在一个紧凑的坚固的铝合金外壳。其多扩展槽和多驱动器设计提供工作站性能、可扩展性和便携功能。FieldGo M9X支持431.79 mm(17 in)TFT液晶屏,多处理器配置,作为PCIe和PCI扩展槽和多个磁盘驱动器托架。铝合金底盘强化橡胶保险杠是强大和坚固的经得起最苛刻的现场条件。支持Intel Xeon E5 2600 系列CPU、431.79 mm(17 in)1 280 mm×1 024 mm LCD、1×133.25 mm(5.25 in) 外部驱动器托架、1×超薄光驱位、2×88.9 mm(3.5 in)内部驱动器架。该设备携带方便,适合户外长时间工作与测量。
3.2地面站控制软件
地面站控制软件是通过Visual C++编写而成,能够在WIN7和WIN10系统下运行。其主要结构包括串口控制、采样路径设置、控制方式选择、下载测量数据、系统状态、百度卫星地图加载、船的姿态显示、航行速度显示、船的动力电池电量的实时监控、主控舱温度的实时监控及采样日志,并生成采样报告。其中采样路径设置包括路径规划完成、清除路径、发送任务、开始定位等功能,并能实时传回由船端海康威视摄像机的图像,方便操作测量与采样。
软件的调试窗口可以实时监控惯性导航的相关参数的运行情况,包括当前船航向角、X角速度、俯仰角、Y角速度、横滚角、Z角速度、东向速度、X加速度、北向速度、Y加速度、天向速度、Z加速度、航行速度、目标航速、当前经度、当前纬度、目标距离、采样标志、GIS状态、GPS收星状态、惯导状态、控制板温度、电池电压、左舵DAC、右舵DAC、左舵信号电压、右舵信号电压、目标航向、航向偏差、目标经度、目标纬度、PID设置和速度设置,可以把每次测量的相关参数保存,供事后分析使用,为测量工作带来极大的便利性。无人测量船上加载有温度传感器和电压传感器,可以实时将主控舱的温度和锂电池电压实时传回岸端基站。
3.3地面站无线网桥
地面站无线网桥与船端无线网桥实现点对点双向通信,最大带宽可以达到100 M以上。本系统设置有失控保护功能,当船端无法将图像信息和相关传感器的数据传回地面站或地面站规划路径无法发出自主导航路径到船端时,说明无线网桥丢失信号,或者通信链路出现问题。此时如果在3 min之内,船端或者地面站无响应通信恢复正常,无人水面测量船将按最初的原始路径自动返航致最初的原始起点,并可以自动存储所有测量数据于船端工控机内,保证测量数据的安全。
3.4手持遥控器
手持遥控器通过2.4 GHZ无线遥控无人水面测量船。测量的相关人员可以通过地面站软件实现手动遥控和自主航行自由切换,满足不同的测量环境和要求。锂电池及逆变电源可以实时为地面站工控机提供不间断交流电,保证在户外长时间、不间断测量。
4 结论
本文研制的基于自主航行的无人水面测量船采用双浮体结构,具有较强的抗风浪能力,有效载荷能力大,是一种通用的复合平台,能搭载各种不同的测量设备和传感器。模块化的舱室管理及稳定可靠的工控计算机,能同时处理包括1 080 P的视频图像及测量仪器地形地貌的相关数据。接口采用通用的RS232接口,能适用于各种设备和传感器的连接与通信。实验表明,无人水面测量船用于水质采样、水文监测、水文勘察及港口视频监控,具有良好的效果及较好的应用前景。目前,该无人水面测量船在武汉东湖及武汉严西湖进行了一系列的应用试验,真正投入商用还需要进一步完善与测试,以保证系统的稳定性与可靠性。
[1]金久才,张杰,马毅,等.一种无人船水深测量系统及实验[J].海洋测绘,2013,3(2):53-56.
[2]Curcio J, Leonard J, Patrikalakis A.SCOUT-alow cost autonomous surface platform for research in cooperative autonomy[J]. Oceans,2005:725-729.
[3]Almeida C, Franco T, Ferreira H, et al.Radar based collision detection developments on USV ROAZ II[J].Oceans 2009-Europe,2009:1-6.
[4]Casalino G, Turetta A, Simetti E.A three-layered architecture for real time path planning and obstacle avoidance for surveillance USVs operating in harbour fields[J].Oceans 2009-Europe,2009:1-8.
[5]Corneliussen J. Implementation of a guidance system for cybership II[J].Master′s thesis, 2003:36-39.
2016-03-23
马诗聪(1995—),男,本科,研究方向为机械与电子信息;刘吉桃(1986—),男,工程师,研究方向为无人艇控制系统。
U674.82
A
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
环球时报(2022-08-15)2022-08-15
网络安全与数据管理(2022年3期)2022-05-23
网络安全与数据管理(2022年2期)2022-05-23
军事文摘(2021年22期)2022-01-18
煤(2021年4期)2021-04-10
少年文艺·我爱写作文(2021年2期)2021-01-11
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05
海外星云(2016年17期)2016-12-01