一种具有容错控制功能的智能球形机器人研究
2016-08-23 06:21王仁康庄一展王州陈灿锋王杰炜福州大学电气工程与自动化学院福建福州350108
中国科技纵横 2016年12期
王仁康 庄一展 王州 陈灿锋 王杰炜(福州大学电气工程与自动化学院,福建福州 350108)
一种具有容错控制功能的智能球形机器人研究
王仁康 庄一展 王州 陈灿锋 王杰炜
(福州大学电气工程与自动化学院,福建福州 350108)
随着科学技术的迅猛发展,智能机器人领域的研究和应用得到了广泛的进步,其中智能球形机器人的成功设计和应用研究也得到了普遍的关注。本文作者将提出一种具有容错控制功能的智能球形机器人研究,通过对球形机器人的多自由度机械结构设计和姿态解算控制算法的分析研究,最后决定采用故障检测法结合姿态调整算法实现其容错性。
球形机器人 容错控制 多自由度机械结构 姿态解算 故障检测
目前,国内外有很多球形机器人的成功设计,他们所采用的驱动结构和行进方式也多式多样,与传统的轮式和履带式机器人相比,这种设计只实现了球形外部结构的设计,普通机器人因缺乏智能的容错控制功能而导致其在复杂的工作环境中容易受损而不能正常工作的问题仍然影响着智能机器人研究领域的快速发展。本文作者将提出一种具有容错控制功能的智能球形机器人研究,该球形机器人分上下两个半球面,各有六只机械足,每只机械足由3个舵机构成三个自由度,通过下半球机械足的摆动调整姿态,实现多向运动。当自身某条或多条机械足出现故障,它能自动检测并通过步态改变,继续前行。其结构原理基于它运动的非完整性约束,利用广义欧拉角给出运动微分方程,建立运动学模型。该球形机器人运动灵活,机动性好,善于穿越崎岖的地形,在各个领域都将具有广泛应用前景。
1 基于容错控制的机械结构设计
1.1多自由度的机械足结构设计
本文研究的球形机器人其特征在于包括上下两个半球面,上半球面和下半球面围成一个球体。上半球和下半球分别均匀的由六支扇形的机械足构成,其中上半球面每支机械足由一个舵机和中间固定板连接而成的一个自由度构成。下半球面每只脚由三个舵机相互连接而成的三自由度机械足构成,六只脚均匀分布在下半球面,和上半球面六只机械足对称的分布在中间连接板两侧,整体构成一个完整的球状机器人。该设计方案相比与轮式和履带式机器人,具有落足点离散,主动隔振以及对地表状况适应性强等众多特点。当上下半球面均处于收缩状态时便构成了可实现整体滚动的球形状态,上半球面展开便构成了一个用于搬运物质的水平托举平台,下半球面展开便可实现六足行走的功能,每只脚三个自由度可配合完成机器人的前进,侧移和旋转运动,当其中某只脚受损时,其他五只脚自动调节运行步态,恢复正常运行状态,实现容错控制。
1.2错误信号检测传感器的选择及其安装
要实现机器人在运行过程中的容错控制功能和托举平台始终处于水平状态,首先要得到机器人在运行过程中的姿态数据和各自由度的工作状态。本文采用整合性6轴运动处理组件MPU6050来检测机器人运动姿态,紧贴在中间固定板的下表面,免除了组合陀螺仪和加速度计轴间差的问题,体积小,角度数据采集精度高,将数据实时反馈给机器人中央控制模块,控制模块通过控制各自由度姿态调整来实现托举平台处于水平状态。故障检测则采用WCS2202霍尔电流传感器来监控各自由度控制舵机是否工作异常,该模块集成设计在控制电路板上,结构简单,数据采集稳定,若发现电流异常,便立刻控制其他自由度通过其余机械足的姿态调整来保证机器人处于正常运行状态。

图1 平台的系统组成图
2 球形机器人运动控制系统的实现
2.1研究平台设计

图2 姿态解算、姿态解析
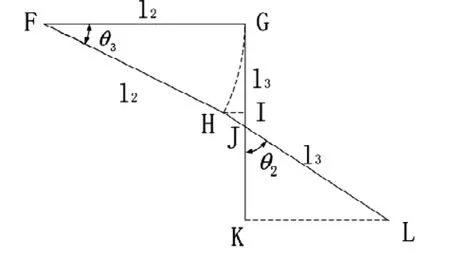
图3 姿态解算、姿态解析
本设计平台的系统组成如图1所示。其中,微控制器选用飞思卡尔公司的MK10DN512VLL10,该微处理器具有32位ARM Cortex-M4内核,运行主频可达到200HZ,为运动控制和姿态解算算法的可靠运行提供了硬件基础。ADC模块作为用于故障检测的霍尔电流传感器采样和压力感应传感器的信号检测,准确保证了机器人的容错控制运行和水平托举平台的闭环反馈控制,IIC可以实现远程通讯和数据传输,用于机器人的远程控制和通信。PWM模块用于驱动上下半球面的舵机,从而实现机器人的调整和运行。各模块相互配合,实现离散采集,整体控制。
2.2机器人正常运行及容错姿态控制
在完成上述控制系统的整体设计后,就可以对其在正常情况下和故障情况下的运行状态进行姿态解算和步态控制分析,首先我们对机器人在正常情况下运行的姿态进行分析,其姿态解析如图2和图3所示。
假设以3号脚为前进方向,则1号脚和5号脚同时运动,2号脚和4号脚同时运动,且运动步态一致,3号脚和6号脚以互补姿态运动,现以1号机械足和3号机械足为例进行姿态解算。
对于1号脚,OC为机械足第一段,其长度为1L;CB为第二段,其长度为2L,前进速度每步为xΔ,关节一摆动角为1θ,根据图中的几何关系可以得到以下关系式:
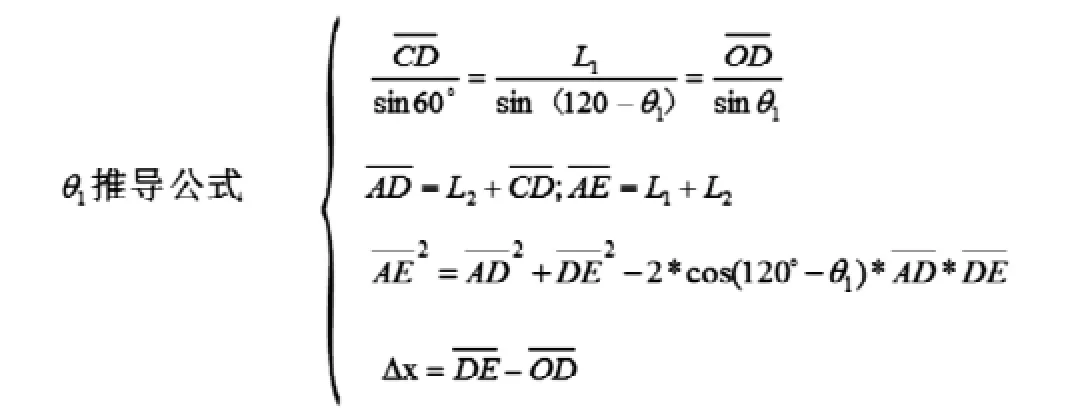
根据以上关系式,在确定步长xΔ的情况下,便可求出转动角1θ。
对于3号脚,FG为机械足第二段,其长度为2L,GK为机械足的第三段,其长度为3L,关节2的摆动角为3θ,关节三的摆动角为2θ。根据图三的几何关系可以得到以下关系式。
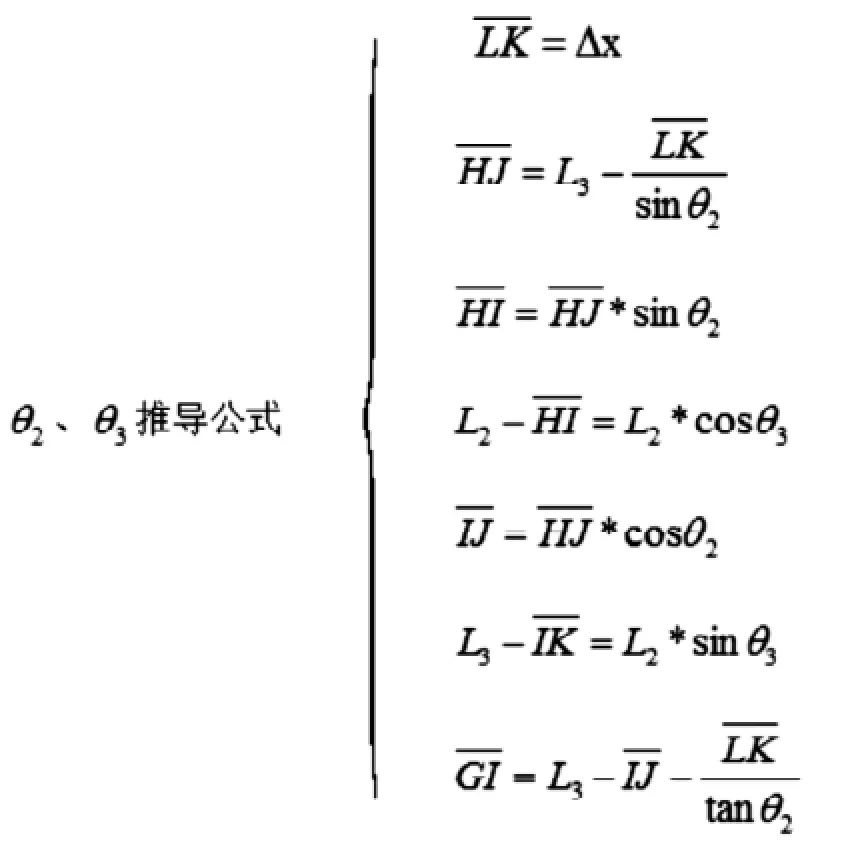
由以上关系式在确定xΔ的情况下,便可求出机械足关节二和关节三的转动角和。
机器人运行过程中,当检测到其中的一只脚受损时,便可通过以下姿态调整保持机器人继续正常运行。现在我们假设1号机械足受损来进行分析,那么我们将默认其对角4号机械足也受损停止工作,则采取四足行进,以2脚和3脚的对称轴为前进方向,2、3、4、6脚依次通过第二个关节和第三个关节摆动3θ、2θ的角度来继续保持机器人稳定前行。
3 结语
随着机器人研究的不断进步和发展,对机器人工作环境的适应性和其自动控制的智能性提出越来越高的要求,因此,在机器人研究过程中,需要综合考虑其机械结构的离散性设计和整体控制的完整性。本文通过对球形机器人的设计平台进行研究分析,综合其姿态解算和自动控制姿态算法的研究,使机器人很好的适应了复杂的工作环境,实现了自动容错控制功能。该平台的成功设计和姿态控制算法研究适应了机器人发展和进步的需求,通过该平台体现了智能控制机器人在实际应用中的优越性。
[1]吴浩.移动机器人运动控制研究[D].北京化工大学,2009.
[2]胡寿松.自动控制原理[M].北京:科学出版社,2001.
[3]肖爱平.一种球形机器人的设计与原理分析[J].机电产品开发与创新,2004(1):14-16.
[4]蔡自兴.机器人学[M].北京:机械工业出版社,1993.
王仁康(1998—),男,甘肃庆阳人,福州大学本科在读。庄一展(1994—),男,福建泉州人,福州大学本科在读。陈灿锋(1995—),男,福建泉州人,福州大学本科在读。
国家大学生创新创业训练计划(201510386001)资助。
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04
学生天地(2020年3期)2020-08-25
当代工人(2020年8期)2020-05-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国化肥信息(2016年33期)2016-05-17
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
振动、测试与诊断(2014年6期)2014-03-01
阅读(中年级)(2009年11期)2009-04-14