带恒功率负载的飞轮储能系统非线性控制算法研究
2016-08-25 08:14曾成碧
四川电力技术 2016年3期
蒲 勇,苗 虹,曾成碧,张 甦
(四川大学电气信息学院,四川 成都 610065)
带恒功率负载的飞轮储能系统非线性控制算法研究
蒲勇,苗虹,曾成碧,张甦
(四川大学电气信息学院,四川 成都610065)
针对恒功率负载的负阻抗特性以及Buck-Boost变换器的非线性特性给飞轮储能系统放电运行带来的控制问题。基于输入输出线性化理论,提出了一种将非线性控制与传统PI控制相结合的改进方法。首先研究了该系统的内稳定性,指出采用电流控制模式,内动态稳定,可以采用控制电感电流间接控制输出电压的策略。根据输入输出线性化非线性控制方法,推导出了电流控制环节的控制律,最后结合传统PI控制对控制方案进行了修正。Matlab/Simulink仿真结果显示,在负荷波动与母线电压跌落的情况下,该算法均能较好地保证输出电压恒定。
飞轮储能系统;Buck-Boost变换器;输入输出线性化;非线性;PI控制
0 引 言
恒功率负载(constant power load,CPL),是指在运行时从电源吸收的功率基本保持不变的一类负载[1]。随着现代电力系统的发展,恒功率负载越来越多地应用到了微电网当中。现代化的信息和通信技术设备、数据中心服务器、计算机都带有相当比重的恒功率负载。有资料显示,这部分负载占据了世界电力消耗的几个百分点[1]。未来的电动汽车和航空高压直流配电系统中,恒功率负载也将占据总负载的很大比重。因此,对于微电网带恒功率负载的研究不仅重要,而且具有实际意义。
目前,大多数新能源和储能装置都是直流的,且上述所提到的恒功率负载多是利用直流供电。由于恒功率负载存在负阻抗特性,当直流微电网中存在大功率的恒功率负荷时,可能引起电网的稳定性问题[2]。
飞轮储能相比传统储能装置,具有高效节能、能量转换率高、无污染、储能密度高等优点[3]。将飞轮储能作为储能单元应用到带有恒功率负载的直流微电网当中,可以很好抑制微电网电压波动,抵消CPL负阻抗特性对电网的影响,提高电网的稳定性。文献[4-5]采用PID双环控制实现了飞轮储能系统的充放电。文献[6]提出了一种PLC的飞轮控制策略。但由于飞轮储能系统在放电过程中,存在输出电压持续下降的放电特性,以及DC-DC变换器非线性特性的影响,使得以上的传统控制方法很难满足高性能要求。近年来,DC-DC变换器非线性控制算法的研究方兴未艾,众多学者提出了多种非线性控制算法。文献[7]将精确反馈线性化与滑模变构控制相结合,得到了一种Boost变换器的非线性控制算法。文献[8]提出了一种状态反馈精确化的Boost电路非线性控制算法。文献[9]提出了一种非线性解耦算法,文献[10]提出了一种双环串级非线性控制算法,这些算法均取得了良好的控制结果。但这些算法都仅限于变换器带电阻性负载的情况,且算法实现较为复杂。
应用输入/输出线性化理论,提出采用基于输入输出的内环电流控制算法。结合传统PI控制技术,采用PI控制外环进行优化。最后在Matlab/Simulink中搭建仿真模型进行仿真,验证了该方法的正确性。
1 带CPL飞轮储能系统组成
采用的异步电机飞轮储能系统如图1所示。整个系统由恒功率负载、飞轮及电机、三相全桥变换器、DC-DC变换器组成。飞轮充电时,V1常开,由母线经三相逆变向飞轮储能系统充能。飞轮储能系统放电时,飞轮电机机端电压经三相全桥整流得到Uin,再经DC-DC变换器向恒功率负载供电。DC-DC变换器采用的是Buck-Boost拓扑结构,引入Buck-Boost变换器的目的是对飞轮储能系统输出端电压进行稳压,消除由于飞轮转速持续下降,导致Uin不断下降的影响,实现对直流母线电压跌落的补偿并确保对恒功率负载的不间断供电。因此,对飞轮储能系统的研究将着重于Buck-Boost电路的分析和控制算法的研究。
2 Buck-Boost双向变换器放射非线性系统模型
Buck-Boost双向变换器是一种典型的分段线性系统。其工作状态在两个模态间切换[7]。
定义以下开关函数:

(1)
式中:T为开关周期;d为占空比函数。根据图1可以建立状态方程为

图1 飞轮储能系统基本结构图
(2)
当开关频率足够高时,可以应用状态空间平均法[5],将式(2)转换为状态空间平均模型,如式(3)所示。
(3)
式中:E为输入直流电压;iL、uC分别为电感电流和电容电压在一个周期内的平均值;L、C分别为电路中电感、电容值;R为负载电阻值;P为恒功率负载的功率;u为占空比函数。选取状态变量X=[x1,x2]=[iL,uC],输出变量y=x1,输入变量为u,可将式(3)表示成单输入单输出仿射非线性系统标准形式:
(4)

输入/输出线性化的实质就是通过构造恰当的反馈控制,使得新输出y与新输入变量V之间呈线性微分关系[11]。基本方法是重复地对输出函数y进行微分,直到得到输出与新输入的线性关系[10]。
对系统输出y不断求导,直到Lgh(x)≠0,可得
(5)
式中:r为系统的相对阶数;Lf、Lg为李导数运算符。
此时便可得到对输出y微分r次之后产生的输出yr与输入v之间的显式关系,当
(6)
式中,v为新的输入变量,将式(6)代入式(5)即可得到输出与新输入之间的线性关系。
y(r)=v
(7)
3 Buck-Boost变换器电流控制系统的内稳定性分析
基于输入输出线性化的基本思想,在实现输入输出线性化的过程中,当高阶系统的相对阶数不等于系统阶数时,即r≠n,则知道系统只实现了部分线性化,还需要考虑内动态系统的稳定性[12]。根据式系统方程(4)求导可得
(8)
显然通过一次微分Lgh(x)≠0,此时相对阶数r=1≠n。由式(6)可知,通过控制输出电流的方法,系统只能实现部分线性化,因此还需要证明系统的内动态稳定性。
设输入输出线性化的坐标变换为z=φ(x),其中z1=φ1(x)=x1内动态对应的状态变量z2=φ2(x)有如下关系[3]:
(9)
可以得到该式的一个解
(10)
令z1=x1,z2=φ(x),通过坐标变换可求得

(11)
式(11)即为系统的内动态方程,要分析内动态系统的稳定性,一般采用分析其零动态特性来得到结论。所谓的零动态特性,是指通过选择输入使得输出恒等于零的特性[7]。
令z1=0,代入式(11)可以得到电流控制系统的内稳定零动态方程为
(12)
容易判断式(12)描述的零动态是渐进稳定的,因此采用输出以电感电流描述的Buck-Boost非线性系统是最小相位系统,通过控制电感电流实现控制输出电压稳定的方法是可行的。
4 双向变换器控制器设计
根据上述线性化思想,求解电流控制律经过上面的求解可知

(13)
即可得到系统输入输出之间的部分线性关系。


(14)
(15)
式中,a是需要给定的系数。
通过上面的求解,已经得到了非线性控制律。若通过功率平衡方程,可以间接推导Iref,但是直接推导Iref将产生静态误差[8]。因此可以考虑,添加PI电压控制外环来得到Iref,由此可得整个系统的控制框图。

图2 系统控制框图
参数的整定选用扩充临界比例法,首先记录不衰减的纯比例控制参数振荡周期tr和增益kr,然后通过式(16)求解方程。
(16)
最终求得电压外环的比例积分参数为
ki=0.8,kp=63
5 系统仿真
为了验证所设计的控制策略,在Matlab当中建立模型进行验证。系统参数如下:电感L=1 mH,负载侧电容C1=1 200 μF,输入端电容C2=3 200 μF,负载电阻值R=5 Ω,异步电机额定电压EAB=380 V,额定转速nN=1 425 r/min,飞轮转动惯量为0.232 kg·m2。
5.1输入电压扰动下的动态响应
异步电机飞轮储能系统设计的目的,就是为了在直流母线故障时,维持母线电压的稳定。当异步电机做电动机运行时,通过对DC-DC电路的非线性控制实现输出电压稳定。为了检验飞轮储能系统控制算法的动态响应,进行如下仿真。
仿真时长2 s,直流母线额定电压200 V,恒功率负载功率400 W。1 s时电压源发生故障,此时飞轮储能系统开始工作由待机状态转为释能状态。仿真图形如图3所示,图4是带恒功率负载情况下PI控制算法的仿真波形。

图3 非线性算法波形

图4 PI控制波形
通过仿真对比,可以看出,在直流母线出现电压崩溃时,异步电机飞轮储能系统可以迅速从待机状态切换到释能状态,补偿直流微网电压。非线性控制策略较PI控制策略在控制性能上有明显的优势。非线性控制下,直流母线电压基本没有明显的跌落,但是电压存在小幅扰动,这是由于恒功率负载所致。PI控制策略下的母线电压,存在大幅度的跌落。虽然通过控制,母线电压可以快速回到额定电压值附近,但存在大幅的电压振荡,系统始终工作在不稳定状态。不难看出,所设计的稳压电路控制策略动态响应更快,控制品质更优。
5.2负载扰动下的动态响应
仍然假定直流母线电压为200 V,分别在0.5 s投入功率为400 W的恒功率负载,1 s切除恒功率负载。考察该控制方法的动态响应。由图5、图6可以看出,在负荷增大的扰动下,母线电压几乎没有跌落,运行平稳突变小。在切除负荷时,母线电压具有较小的突变,且能快速稳定运行,具有快速调节的特性。

图5 负载扰动时飞轮储能系统对母线的补偿波形
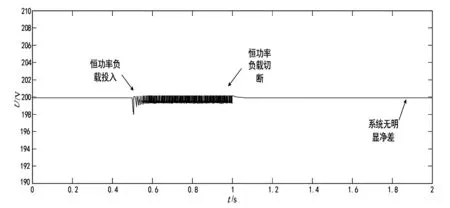
图6 PI控制下负载扰动波形

图7 非线性算法带恒功率负载启动
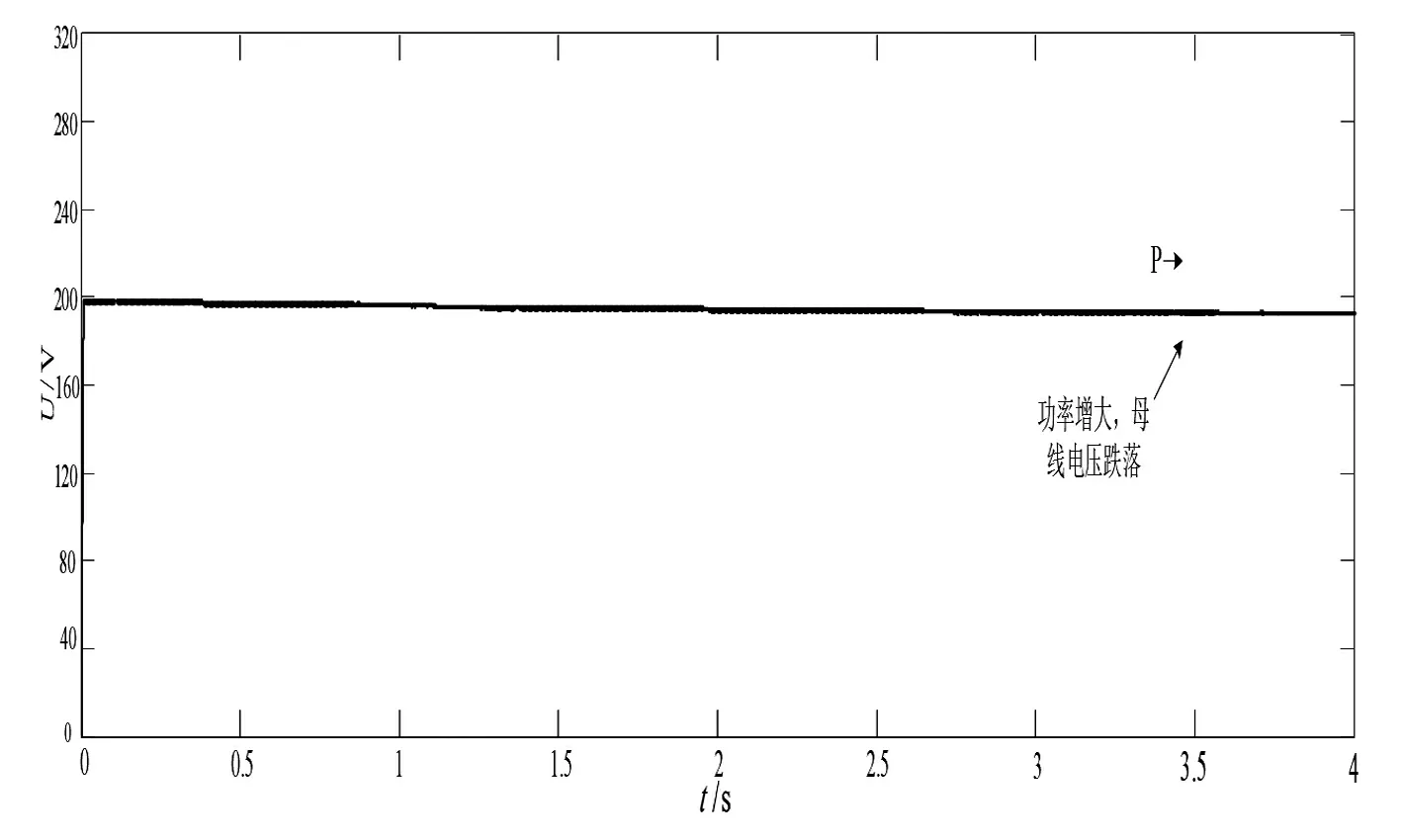
图8 PI控制带恒功率负载启动
图7、图8给出的是带恒功率负载启动的波形,0 s开始,恒功率负载接入母线,功率由0 W快速上升至2 000 W,达到最大功率之后,稳定运行。由仿真结果可以看出,在恒功率负载功率大幅增加的情况下,非线性算法仍然可以维持母线电压的稳定,不过存在小幅的净差。PI控制算法下,母线电压会持续跌落,负载功率进一步增大,母线电压甚至可能出现崩溃。
通过上述各仿真波形,可以得出结论:所设计的飞轮储能系统,能快速平响应直流母线的电压波动,迅速切换各工种状态。根据非线性控制策略设计的稳压电路,能在负荷变化的情况下,很好地维持输出电压的稳定,但存在小幅的系统净差。
6 结 语
所提出的一种针对带恒功率负载的飞轮储能系统的控制算法,是将输入输出非线性控制与传统PI控制结合,具有响应速度快、鲁棒性强的特点,而且较之其他非线性控制方法,所提方法控制律简单,具有较高的工程实用性。在Matlab当中搭建的仿真显示,依据所得出的控制律,在电源电压和负载大范围波动的情况下,能很好地保证系统稳定运行。与传统PI控制相比,该算法在动态品质和控制效果上更具优势。
[1]张旭辉,温旭辉,赵峰. 抵消恒功率负载负阻抗特性影响的双向Buck/Boost变换器控制策略[J]. 电工技术学报,2013,28(11):195-201.
[2]李玉梅,査晓明,刘飞,等. 带恒功率负荷的直流微电网母线电压稳定控制策略[J]. 电力自动化设备,2014,34(8):57-64.
[3]Alexis Kwasinski ,Chimaobi N. Onwuchekwa. Dynamic Behavior and Stabilization of DC Microgrids with Instantaneous Constant-power Loads[J]. IEEE Transactionson Power Electronics,2011,26(3):822-834.
[4]陈素斌,张方华,任仁,等. 具有恒功率特性的DC/DC变换器的研究[J]. 电力电子技术,2013,47(06):15-17.
[5]任世涛,刘历良,沈润夏. 带恒功率负载的buck变换器的稳定性分析和最优PID控制器设计[J]. 电气开关,2010,48(6):19-21.
[6]满永奎, 李五一,唐巍.PLC 控制的飞轮储能系统[J].控制工程, 2009,16(S1):145-147.
[7]乐江源,谢运祥,洪庆祖,等. Boost变换器精确反馈线性化滑模变结构控制[J]. 中国电机工程学报,2011,31(30):16-23.
[8]高朝晖,林辉,张晓斌. Boost变换器带恒功率负载状态反馈精确线性化与最优跟踪控制技术研究[J]. 中国电机工程学报,2007,27(13):70-75.
[9]邓卫华,张波,丘东元,等. 电流连续型Boost变换器状态反馈精确线性化与非线性PID控制研究[J]. 中国电机工程学报,2004,24(8):48-53.
[10]王楠,李永丽,张玮亚,等. 飞轮储能系统放电模式下的非线性控制算法[J]. 中国电机工程学报,2013,33(19):1-7.
[11]卢强,梅生伟,孙元章.电力系统非线性控制 (第二版)[M].北京:清华大学出版社, 2008: 24-122.
[12]帅定新,谢运祥,王晓刚,等. Boost变换器非线性电流控制方法[J]. 中国电机工程学报,2009,29(15):15-21.
[13]张维煜,朱熀秋. 飞轮储能关键技术及其发展现状[J]. 电工技术学报,2011,26(7):141-146.
[14]周岗,姚琼荟,陈永冰. 基于输入输出线性化的船舶全局直线航迹控制[J]. 控制理论与应用,2007,24(1):117-121.
[15]Miao-miao Cheng,Shuhei Kato,et al. A Novel Method for Improving the Overload Capability of Stand-alone Power Generating Systems Based on a Flywheel Induction Motor[C]. Power Electronics Specialists Conference,PESC IEEE, 2008: 3677-3683.
[16]Shuhei Kato, Takumi Tsujino, Miao-miao Cheng,et al. Inverter-less Flywheel Applications for Voltage Sags and Blackouts Compensation[C]. Power Electronics and Applications,13th European Conference on Publication, 2009:1-10.
蒲勇(1989),硕士研究生,研究方向为分布式发电和微电网;
苗虹(1971),博士、副教授,研究方向为分布式发电和微电网;
曾成碧(1969),博士、副教授,研究方向为电机控制、高压与绝缘及智能分布式系统;
张甦(1990),硕士研究生,研究方分布式发电和微电网。
According to the control problems caused by the negative impedance characteristics and the Buck-Boost converter of flywheel energy storage system with constant power in discharging mode, an improved method which combines nonlinear control and traditional PI control is proposed based on input-output linearization theory. Firstly, the internal stability of the system is analyzed. It is pointed out that the internal dynamics of the system is stable under current control mode, and it is feasible to control the output voltage indirectly through the regulation of inductive current. According to nonlinear control method based on input and output linearization, the control rate of current control link is deduced. Finally, the control scheme is modified by the traditional PI control. The Matlab/Simulink simulation results show that under the condition of load fluctuation and bus voltage drop, the proposed algorithm can ensure the output voltage to keep constant.
flywheel energy storage system; Buck-Boost converter; input-output linearization; nonlinear; PI control
TM919
A
1003-6954(2016)03-0049-05
2016-03-31)
猜你喜欢
中等数学(2020年2期)2020-08-24
模具制造(2019年7期)2019-09-25
测控技术(2018年9期)2018-11-25
中国自行车(2017年11期)2017-04-04
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
柴油机设计与制造(2015年3期)2015-12-05
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
电源技术(2014年9期)2014-02-27