使用反步法控制实时称重机械臂对水产品分拣加工的改进
2016-08-29 02:14兴宁市技工学校机械系
电子世界 2016年15期
兴宁市技工学校机械系 黄 健
使用反步法控制实时称重机械臂对水产品分拣加工的改进
兴宁市技工学校机械系黄健
目前在国内规则物体分拣技术比较成熟,并且也得到了广泛应用。但是对非规则物品的加工分拣技术还是比较落户。传统的水产品分拣方法整个分拣过程操作复杂、花费时间较长,同时分拣的效率与准确度比较低。本文给出的反步法控制实时称重机械臂分拣系统与视觉识别相结合,集成称重、自动规划路线、分拣于一体,与传统分拣相比,具有称重简单,生产节拍短,成本低,节约成本,生产效率提高等特点。
机械臂;分拣系统;反步控制
1.引言
近年来,大型水产品物流中心急需先进适用的自动分拣设备。国内已经研制出了A字型自动分拣机,它由传送带和置于传送带上方的A字形货架组成。该设备解决了分拣作业的自动化,节省了人工,减少了差错,但由于传送带的线速度不宜过高,限制了设备的分拣效率,此外,还有托盘式分拣自动分拣系统线,它根据邮政包裹分拣设备原理设计,存在上货低和人工需求量大等问题;还有参考引进设备开发的通道式自动分拣设备,速度快,由于产能低,不满足当前需要。
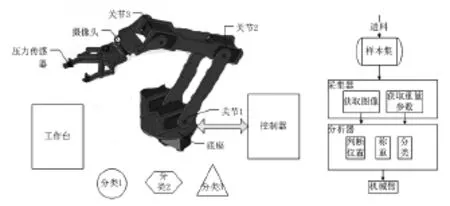
图1 .1 机械臂系统整体架构和流程
本文研究机械臂在水产品分拣加工过程中的应用,结合图像视觉和实时称重。主要内容分为:机械臂运动模型分析设计,图像处理设计,称重系统设计。系统结构如图1.1所示。
2.水产品分拣系统构成
分拣系统硬件部分由机械臂、视觉分析模块、称重器等组成。摄像头拍摄图像到中控台后台进行解析,此外,重量计算由机械臂手抓上的压力传感器采集并由中控后台进行计算,所得的结果分别用于机械臂轨迹确定、重量计算、产品分类。
如图1.1所示,机械臂主体高150cm,长375cm,宽307cm。机械臂由转动圆板、上臂、前臂和手组成,各关节由伺服电机驱动。机械臂手末端安装压感设备,用于测定重量数据。
3.机械臂动力模型设计
三连杆机械臂刚体动力学建模方法主要有罗伯森·维腾波哥方法、牛顿-欧拉方法、拉格朗日法、凯恩方法以及休斯顿法。上述建模方法方程建立过程繁琐,未知变量太多,求解计算工作量大,容易出错。多体运动分析的等效有限元法具有建模过程简单、高效,容易编程求解。
在机械臂三连杆关节作用三级行星减速器连接,这不仅扩大电机的扭矩,增大了手臂的活动范围。单机械臂共4个自由度,在肩部有一个旋转和一个收张,在肘部有一个收张,在腕部有一个收张,三个电动机支持伸展力,另一个电机支持肩部的旋转力。机械硬件的参数,如表1所示。
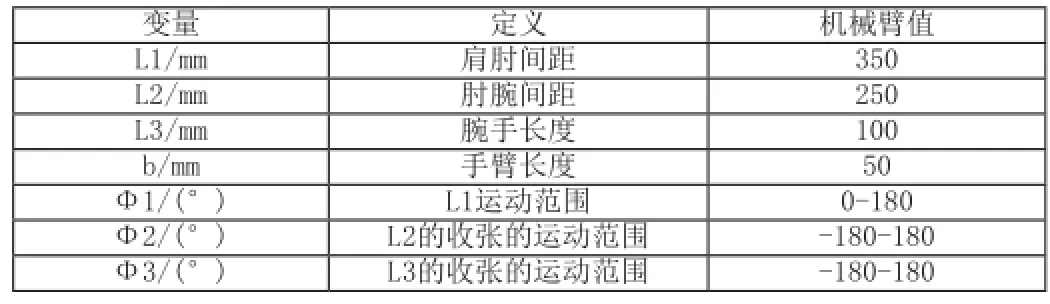
表1 机械臂参数变量
电机的参数,如表2所示。
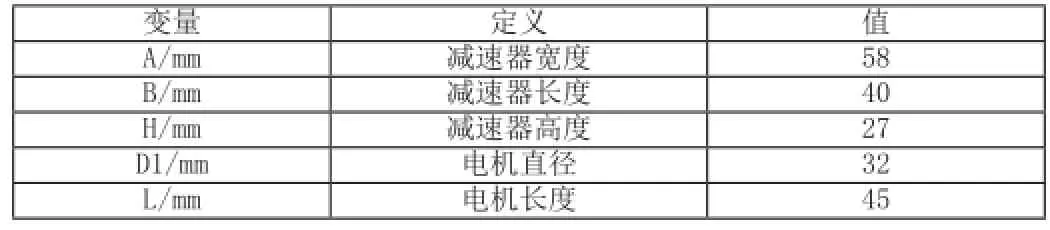
表2 电动机硬件参数
4.机械臂组合称重
国内外组合称重技术,工作时要完成70件/min,意味着在很短的时间内完成重量检测、组合计算。在整个过程中组合计算占用时间较长,一方面要满足精度要求,另一方面要满足包装速度。目前主要的称重方法有:定量动态称重、起吊货物动态称重、黏性食品动态称重。
结合机械臂和水产品的特性,本文提出了一套针对水产品的机械臂动态组合称重方式,如图4.1所示。


图4 .1 组合称重流程

图4 .2 称重模块硬件架构
水产品加工完成后,经传动带输送到称重区,假设每次都随机抽取15个样品进行测试,单个样品重量分别按照产品类别不同来定义重量区间,假设产品一(螃蟹)单重100~500之间,产品二(鲍鱼)单重在200~600之间,产品三(鳕鱼)单重在500~1500之间,我们可以根据重量大致分一下类,然而,这是作为一种分拣的依据。不仅可以实时称重,而且可以结合图像处理结果,对产品进行精确分类。
本文选取的西门子PLC组合秤作为控制系统。
电脑组合秤工作过程主要包括重量检测、A/D转换、信号输入、计算、输出、物料检测、电机控制等(如图4.2所示)。
人机界面:可以实现一些系统参数的修改,查看称重记录,以及当前运行状态。
称重传感器:采集被测对象的重量数据。
CPU:组合称重的核心部分,主要负责数据的运算和分析。
检测信号:负责检测样品是否符合要求。
原点信号:检测电机是否达到既定工作状态。

表3 机械臂执行位置结果表
5.实验
文中提出了一种可实时称重机械臂水产品分拣加工系统,为了验证本系统的实用性、先进性,将系统至于水产品加工中心平台,进行了测试。
5.1 实验过程
本实验设计机械臂自主抓取,通过分析目标实际坐标位置与手抓到导致之间的误差值,水产品实际重量和机械臂测量重量之间的误差值,以及机械臂分类结果和实际分类结果的误差,验证基于重量检测和图像识别的机械臂分拣加工系统的优越性。
实验数据如表3所示。表中三个坐标值的参考坐标系均为机械臂的底座中心坐标系,单位为毫米(mm),误差值为机器运行值与实际值之间的差值。表4所示为样品实际重量和测量重量之间的差值。表5所示为样品通过系统的分类结果和实际分类的误差。

表4 称重结果表

表5 分拣结果表
实验得出,机器人计算得到的位置与目标物体实际位置之间的平均误差为(1.12,0.88,0.90),该误差在允许范围内,机械臂可以准确抓取到样本。并且,根据重量检测系统得到的重量与样品的实际重量之间的平均误差为2.35g,该范围也在误差允许范围内。此外,结合了图像视觉和实时称重系统的机械臂在分拣准确性上也达到了92%以上。因此,文中所提出的机械臂实时称重分拣加工系统是可行的。
[1]梁小波,蔡勇,蒋刚.三维串并联机械臂的运动学分析[J].机械传动,2013,05:70-74+85.
[2]晁衍凯,徐昱琳,周勇飞,吕晓梦,王明.基于双目视觉的机器人目标定位与机械臂控制[J].计算机技术与发展,2013,07:6-9.
[3]徐昱琳,杨永焕,李昕,陈万米,晁衍凯.基于双目视觉的服务机器人仿人机械臂控制[J].上海大学学报(自然科学版),2012,05:506-512.
[4]谢伟东,王磊,佘翊妮,游红武.条烟自动分拣的异步法及其装置[J].工程设计学报,2007,02:112-116.
[5]刘坦.实时在线分拣和称重系统研究[D].上海海洋大学,2013.
[6]熊根良.具有柔性关节的轻型机械臂控制系统研究[D].哈尔滨工业大学,2010.
[7]郭伟斌,陈勇,侯学贵,胡娜.除草机器人机械臂的逆向求解与控制[J].农业工程学报,2009,04:108-112.
[8]张翠.基于RBF神经网络的机械臂运动控制算法及应用研究[D].兰州交通大学,2014.
[9]李树荣,马慧超.基于反步法的机械臂鲁棒自适应位置/力控制[J].中国石油大学学报(自然科学版),2014,01:172-176.
[10]彭圣明,裴海龙,王清阳.基于机械臂的运动学研究与应用[J].机械设计与制造,2011,07:136-138.
[11]戴学丰,孙立宁,刘品宽,蔡鹤皋.柔性臂机器人控制算法综述[J].电机与控制学报,2002,02:158-161.
[12]梁小波,蒋刚.三连杆机械臂三维空间运动学分析[J].机械设计与制造,2013,12:67-69+72.
[13]张羽,李雁斌.一种新颖电机控制方法及其在机械臂控制中的应用[J].微电机,2008,09:54-57+77.
At present the rule object sorting technology is mature and is widely used in the domestic.But the process and items technology for irregular items is settled.The sorting process the traditional method of sorting of aquatic products operation is complicated and time is long.At the same time sorting efficiency and the accuracy is lower.In this paper,we use backstepping method control the sorting system of the real-time weighing mechanical arm.we give the mechanical arm,integrated weighing,automatic planning route,sorting into an organic whole,compared with the traditional sorting,weighing with simple,short production rhythm,low cost,cost savings,improve production efficiency,etc.
Mechanical arm;Sorting system;Backstepping control
黄健(1968—),男,兴宁市技工学校机械系机械讲师,机械高级技师,主要从事机械控制研究和教学工作。
猜你喜欢
今日农业(2021年4期)2021-11-27
今日农业(2021年15期)2021-11-26
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
文苑(2020年6期)2020-06-22
渔业致富指南(2019年21期)2019-11-21
能源(2016年2期)2016-12-01
筑路机械与施工机械化(2014年2期)2014-03-01
诗潮(2014年7期)2014-02-28