
无刷直流电动机的DSP模糊神经网络控制
2016-09-01 02:48乔维德无锡开放大学江苏无锡214011
电气传动自动化 2016年1期
乔维德(无锡开放大学,江苏无锡214011)
无刷直流电动机的DSP模糊神经网络控制
乔维德
(无锡开放大学,江苏无锡214011)
设计一种动态递归模糊神经网络控制器,用于无刷直流电机双闭环控制系统中的转速调节器。采用数字信号处理器作为无刷直流电动机的转速控制与运算单元,设计基于数字信号处理器的无刷直流电机控制系统,并进行计算机仿真和实验验证。仿真实验结果表明,该系统鲁棒性、抗扰性和实时性很强,控制效果良好。关键词:无刷直流电机;递归模糊神经网络;DSP;仿真
1 引言
永磁无刷直流电动机(以下简称BLDCM)其因结构简单、维护方便、调速性能好、起动转矩大等优点,日前已在航空航天、汽车、家用电器等领域有着广泛应用。一般BLDCM控制系统利用单片机并配备很多种接口设备和功率器件等进行控制。虽然这种系统的控制性能较为稳定,可是单片机的控制指令比较繁杂,其内部处理器的时钟频率又较低,所以其运算速度比较慢,很难满足和适应BLDCM调速系统的高精度控制要求。而数字信号处理器(以下简称DSP)功能强大,处理速度极快,控制精度非常高,且可以实现复杂的智能控制算法。在BLDCM控制系统中,可以采用一片DSP取代单片机及其附加的多种接口电路和功率器件,从而可以大大简化BLDCM控制系统的硬件电路结构。为此,文中以DSP芯片TMS320LF2407A作为系统控制的核心处理器,设计BLDCM的递归模糊神经网络双闭环智能控制系统,并给出系统仿真实验结果,以证实其良好的控制效果。
2 BLDCM控制系统
2.1系统结构框图
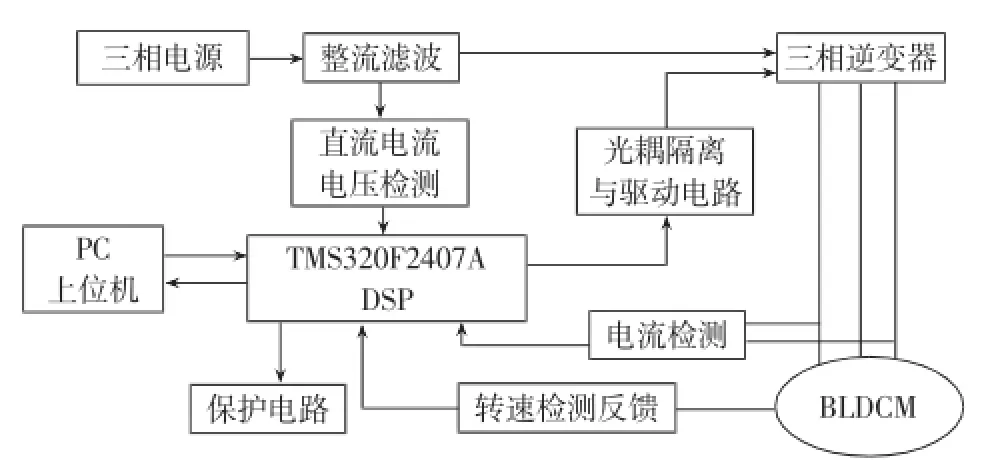
图1 控制系统结构原理框图
图1为BLDCM控制系统的结构原理图。该控制系统由主电路、控制电路、保护电路三部分构成。主电路主要由三相电源、整流滤波、三相逆变器、直流电流电压检测等电路组成,经过交—直—交的变换电路,输出能调压调频的交流电源到BLDCM。图1中,整流滤波通过三相二极管整流桥电路实现;三相逆变器采用IPM智能模块PM50RVA120,模块结构含六个带续流二极管的IGBT及其驱动电路;直流电流电压检测电路的作用是把待检测信号输送给DSP控制电路,从而实施欠压、过压以及过流的保护。DSP控制电路由DSP芯片及其配置、交流电流检测、BLDCM转速检测、光电隔离及功率驱动等电路组成。其中,BLDCM的两相电流通过使用电流传感器来检测,然后应用采样电阻和多级运放电路输出0-5V的模拟电压,并与DSP TMS320LF2407A内的A/D转换器外引脚相接。BLDCM转速检测反馈环节采取光电码盘和BLDCM同轴相连,光电码盘输出与转速对应的光电脉冲,经QEP正交编码脉冲电路将电机转速信号转变为相应的电压信号,且由分压电阻分压后传给DSP的ADC转换输入端。DSP下位机与PC上位机均采用串行通讯传输方式,DSP下位机可以按照命令对BLDCM进行相应的控制操作。
2.2系统控制方案
BLDCM控制系统选取双闭环智能控制的设计方案,就是对转速外环和电流内环分别加以控制,而且将转速外环的输出设定为电流内环的给定输入信号。BLDCM系统控制方案如图2所示。虚线框部分表示TMS320LF2407A控制器,TMS320LF2407A的各组成器件功能通过相应的控制算法达到控制的目的。

图2 BLDCM系统控制方案框图
图2中,首先通过系统的PC上位机给出设定电机转速,由TMS320LF2407A经过相关运算等得到PWM输出信号,该信号通过光耦隔离与驱动电路驱动并控制三相逆变器的导通次序及导通时间,以有效控制和调节BLDCM转速。其中的电流调节器仍采用传统的PID调节器,而转速调节器设计为一种动态的递归模糊神经网络控制器(RFNN),从而增强BLDCM控制系统的适应性和鲁棒性。
3 RFNN控制器设计
RFNN控制器的结构如图3所示。它共有4层BP网络,分别是输入层、模糊化层、模糊规则层、输出层,且在模糊化层加入递归神经元。递归神经元能实现内部信息的反馈连接并及时保存信息,RFNN的输出既与当前输入有关,还与过去的输入和输出有关,以形成局部或全局递归的网络结构,可以通过较快收敛速度和较少神经元个数,有效解决BLDCM控制系统的高度非线性映射缺陷。

图3 RFNN控制器结构
在输入层中,网络的输入矢量x为[e,ec]T,将输入量x转换为[-1,1]区间值。输出节点值为:
Oi(1)=Ii(1)=xi
式中,i=1,2;x1=e,x2=ec。
在模糊化层中,对输入变量进行模糊化处理,每个输入变量均分别表示为模糊语言变量{PB,PS,ZE,NS,NB},其中,PB为负大,PS为负小,ZE为零,NS为正小,NB为正大。计算求取每个输入分量属于各模糊语言变量集合的隶属度函数,用高斯基函数表示隶属函数。该模糊化层共有10个输出节点,其输出值为:

因在模糊化层中的每一个节点均引入同结构的递归环节节点,所以该层输入节点值应为:

式中,r
ij
为递归单元连接权值
为本层前一过去时刻的输出值。
在模糊规则层中,图形符号“∏”代表模糊“与”操作,可用乘积“*”实现模糊语言变量“AND”运算。模糊规则层共有25个输入节点,即:
在输出层中,首先要对模糊规则层的输出模糊值进行去模糊化和归一化处理。该层的输入和输出值分别为:
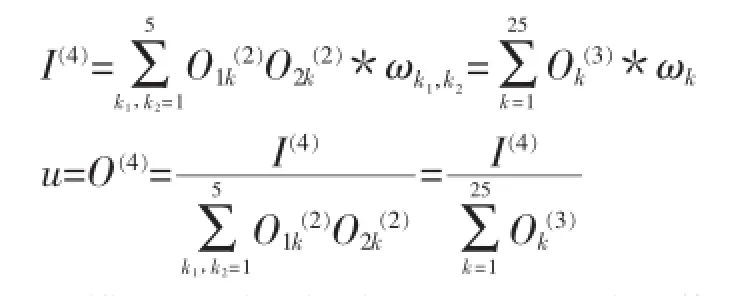
式中,ωk是模糊规则层与输出层间的连接权值。
4 RFNN控制器参数优化
在图3所示的RFNN中,aij、bij(i=1,2;j=1,…5)、rij,ωjk,ωk(k=1~25)等参数可以通过最小化误差目标函数,采用一定的在线监督学习算法来调整和寻优,以提升RFNN控制器的动态性能。
均方误差(MSE)目标函数定义公式为

上式中,N是网络训练样本数量,E(t)定义为经过每次迭代的瞬时平方误差,其公式为
其中,ud(t)为第t时刻系统的期望输出值,u(t)为第t时刻系统的实际输出值。网络控制器中各参数的修正学习算法均采取文末参考文献[1]的IGABP混合算法,从而实现目标函数E最小及参数aij、bij、rij、ωjk、ωk最优。RFNN控制器的实时控制流程图如图4所示。

图4 RFNN控制器实时控制流程图
5 RFNN控制的DSP实现
应用DSP实现对BLDCM系统控制的硬件原理如图5所示。

图5 DSP实现控制的系统框图
使用C++语言编写系统的控制程序,主程序模块及以DSP中断功能实现算法的程序控制框图如图6和图7所示。
6 仿真研究

图6 主程序流程图

图7 DSP实现控制流程图
应用MATLAB中的Simulink功能对BLDCM双闭环控制系统做仿真实验,选取BLDCM仿真参数如下:定子相电阻R=1.453Ω,定子相绕组自感L=0.02H,互感M=0.0073H,转动惯量J=0.0055kg·m2,额定转速ne=1200r/min;应用IGA-BP混合算法时定义群体规模N为55,交叉概率pc为0.85,变异概率pm为0.04。进化迭代次数为500步,RFNN网络学习误差为0.0001。图8(a)表示BLDCM控制系统中转速调节器为传统PID控制器时的转速响应曲线,图8 (b)表示转速调节器为RFNN控制器时的转速响应曲线,其中在t=6秒突加15N·m的负载。图9、图10分别表示本文设计的基于DSP的RFNN控制器BLDCM系统对于给定正弦波和方波转速时的响应情况,实线①为给定输入转速,虚线②为实际输出转速。通过仿真结果分析得出,BLDCM系统采用本文设计的RFNN控制器相比传统PID控制器,具有更快的响应速度、更高的控制精度、更低的超调量、更强的抗干扰能力,可以很好地实现BLDCM系统的调速控制。

图8 转速响应仿真波形图

图9 系统正弦波转速响应
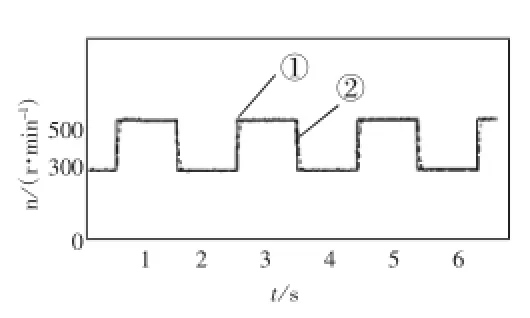
图10 系统方波转速响应
7 试验分析
BLDCM的试验系统结构图如图11所示。
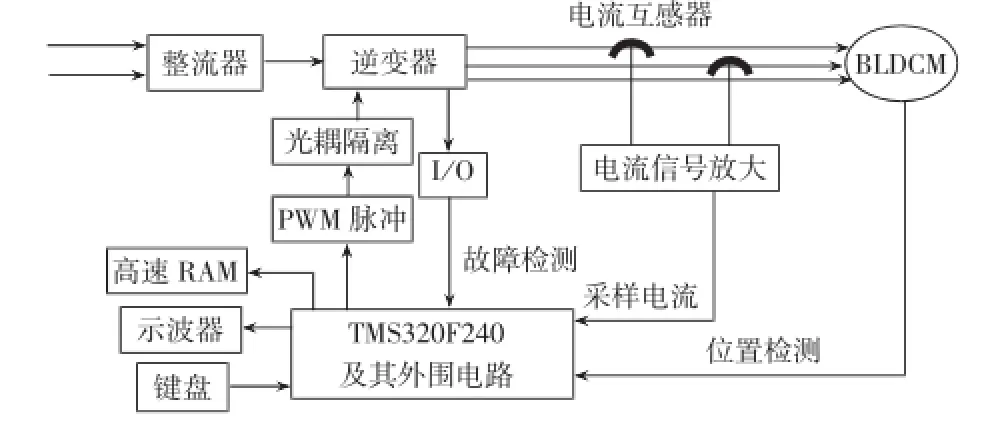
图11 BLDCM试验系统结构图
图12为示波器显示的BLDCM转速跟踪曲线。图中,①为给定电机转速,②为实际检测的BLDCM转速。从图中可以看出,BLDCM具有较强的速度跟踪能力和动态性能,能够达到预期的控制要求和效果。

图12 BLDCM转速跟踪曲线
8 结束语
将设计的RFNN控制器取代传统的PID控制器,用于基于DSP芯片的BLDCM双闭环控制系统中的转速调节器,以实现对BLDCM的速度精确控制。仿真实验结果表明,本文所设计的RFNN速度控制比传统PID控制的转速超调量更小、抗扰动能力更强、稳态精度更高、实时性更强、鲁棒性更强,实现了较为理想的控制效果,对BLDCM调速控制系统的实际工程应用具有一定的参考价值。
[1]乔维德.基于改进遗传算法的无刷直流电动机递归模糊神经网络控制[J].微特电机,2008,36(5):32-35.
[2]乔维德,基于微粒群算法的模糊控制在BLDCM中的应用[J].微电机,2008,41(6):90-92.
Fuzzy neural network control of BLDCM based on DSP
QIAO Wei-de (Wuxi Open University,Wuxi 214011,China)
A dynamic recurrent fuzzy neural network controller is designed.It is used in the BLDCM double closed loop control system of speed governor.Taking digital signal processor as BLDCM speed control and computing unit,the BLDCM control system based on digital signal processor is designed.The computer simulations and experiments are given.The experimental results show that the system has strong robustness,well resistance to interference,good real-time properties,and has perfect control effect.
BLDCM;RFNN;DSP;simulation
TM33
A
1005—7277(2016)01—0025—04
乔维德(1967-),男,教授,江苏宝应人,主要研究方向为电机及智能控制技术。
2015-06-03
猜你喜欢
电子技术与软件工程(2016年20期)2016-12-21
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年17期)2016-07-23
物联网技术(2015年12期)2015-12-28
