
CORS网络RTK系统定位精度检测方法研究
2016-09-08 03:34尚飞艳郭俊强严地伟
甘肃科技 2016年10期
尚飞艳,郭俊强,刘 锡,严地伟,魏 兰
CORS网络RTK系统定位精度检测方法研究
尚飞艳,郭俊强,刘锡,严地伟,魏兰
(61243部队,甘肃 兰州730020)
简述了网络RTK系统定位的基本原理,对几种常用定位精度测试方法进行了分析比较。以工程项目使用某市CORS网络RTK系统为例,对该系统的定位精度进行了测试和评价分析。实际应用结果表明,该CORS网络RTK较常规RTK技术而言,其导航定位的可靠性和精度更高,可满足用户需求。
CORS;网络RTK;定位精度;检测方法
网络RTK系统是由若干个固定的、连续运行的GPS参考站,利用现代计算机、数据通信和互联网技术组成的网络,通过建立精确的误差修正模型,实时地向不同类型、不同需求、不同层次的用户自动提供不同类型的GPS观测值(载波相位,伪距)、各种改正数、状态信息以及其他有关GPS服务项目的系统[1]。同传统RTK系统相比,网络RTK系统的有效作业范围增大,定位精度以及可靠性得以提高,利用网络RTK系统可以开展全天候、多功能、多用途、应用广的服务,大大提高了空间基础数据的利用率。但是其流动站在定位时,受到许多不定因素的影响,在缺乏必要检核条件时,对其定位精度的可靠性无法进行正确评估,导致网络RTK系统在一些工程中的应用受到制约[2]。本文将重点分析和比较网络RTK系统定位精度可靠性的检验方法,并结合某市CORS网络RTK系统,对该系统的定位精度进行测试和评价分析。
1 网络RTK定位基本原理
目前,网络RTK技术算法主要有虚拟参考站技术(VRS)、主辅站技术(MAC)、区域改正数法FKP技术和综合误差内插技术(CBI)4种[3]。
网络RTK的几种算法都是根据流动站绝对定位的坐标发送给数据中心,然后按照各自的模型进行内插得到流动站的改正信息,并通过无线通信技术发送给流动用户并进行差分。以虚拟参考站技术(VRS)为例,其定位基本原理如图1所示。
流动站在工作前,先将概略坐标(NMEA0183格式)通过无线移动数据链路(如GSM/GPRS、CDMA)传送给数据中心,数据中心在流动站附近位置创建一个虚拟参考站(VRS),然后内插得到虚拟参考站各项误差影响的改正值,并以RTCM格式通过NTRIP协议发给流动站用户;流动站用户接收数据中心发送来的虚拟参考站差分改正信息或虚拟观测值,进行差分解算得到用户cm级的定位结果[4]。

图1 VRS工作原理图
误差模型优化是网络RTK定位的关键技术之一,它是通过利用多个参考站的观测数据对电离层、对流层等误差模型进行优化,降低甚至消除误差。网络RTK改正数计算是通过相位观测值与改正数(差分数据)联合计算,获得高精度解算坐标,差分改正数包括电离层改正数、对流层改正数和轨道改正数。网络中相位观测值可由式(1)决定:

式中:λ为载波相位长;φ为载波相位观测值;ρ为站星间几何距离;I为电离层延迟;T为对流层偏差;O为卫星轨道偏差;M为多路径效应误差;ε为接收机噪声;i、k为卫星标号;△、△△分别为单差和双差因子;A、V为主参考站及VRS标号[5]。
2 网络RTK定位精度测试方法
一个建成的网络RTK是否能够提供连续、动态和高精度的空间定位服务,是否满足多类用户实时定位以及事后数据处理高精度定位应用需求,很大程度上取决于系统的定位精度。目前常用的检验方法有静态已知点检测方法、实时动态观测值与后处理结果比较的检测方法、反算基线长法、动态规则几何轨迹检测方法和固定基线长度相对检测方法等。
2.1静态已知点检测法
该方法是当前网络RTK定位精度检测中最常用也是最易实现的方法。一般通过在系统覆盖区域内选择具有代表性的、已知精确坐标的检测点,将动态用户接收机架设在已知点上进行实时定位并记录结果文件,然后对实时定位结果进行统计分析,得到在检测点上实时定位的内、外符合精度。
内符合精度用于评定网络RTK定位的稳定性程度,具体方法是计算每一测点所有测量值的算术平均值,再将该算术平均值与每一测量值求差,分析统计出各方向(X、Y、H)差值的分布情况,以反映系统实时定位的稳定性和收敛性。其计算公式为:

其中:ν是测试点观测值与其算术平均值的差值;n为观测值总数。
网络RTK的外符合精度反映了系统定位的准确性和与己有坐标系成果一致性。具体方法是在己知测试点上,通过转换参数实测得出当地坐标系下的坐标成果,与该测试点的己知坐标成果相比较,即可得出在 (X、Y、H)方向上的外符合精度分布情况。外符合精度与已知点位精度、转换参数精度、系统定位精度三者有关。其计算公式为:

式中:q检测点的总数;△为检测点实测值与已知坐标值的差值[6]。
该方法的优点是统计方法简单,易实现,在检测点上能显著地反映网络RTK系统实时定位精度;缺点是需要已知检测点的精确坐标,如果在系统覆盖区域内很难找到已知点或者坐标基准不统一,该方法就无法实施。
2.2与后处理结果比较法
与后处理结果比较法是选定某一检测点,先进行静态观测,然后再进行实时动态观测,把实时动态的定位结果与事后静态数据处理得到的结果进行比较,以事后静态数据处理得到的结果为真值,来确定实时动态定位结果的精度可靠性。该方法弥补了静态已知点检测法需要已知检测点精确坐标的不足,在系统某些区域很难找到已知点的条件下,采用该方法进行系统定位精度检测显得非常有效。但事后数据处理的定位结果受观测数据质量和参考站坐标精确性影响。
2.3反算基线长法
反算基线长法主要是对通视的、相距不远的两点进行实时动态测量,利用实时动态的定位结果反算其基线长,然后与使用静态测量得到的基线长或使用常规测量方法测得的距离进行比较,两者的偏差在一定程度上反映出了系统的定位精度。
2.4动态规则几何轨迹法
动态规则几何轨迹法是将接收机沿着固定的、有规则的轨迹以一定的速度运动,比较用户定位获得的轨迹与实际轨迹之间的偏离值,衡量用户定位精度。动态检测的一种常用实现方法,如图2所示。
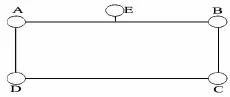
图2 动态规则几何轨迹法
选择一个很规则的矩形轨迹,测试时将接收机天线从A点出发沿着A-B-C-D的顺序运动,在角点A、B、C、D做短暂的停留并记录测量时间,这样不仅能检验用户接收机的运动轨迹偏差,而且还检验在特征点(A、B、C、D)的定位精度,结合二者可以反映用户接收机的动态定位偏差。
由于GPS动态定位存在误差,测出的运动点的位置可能会偏离直线,在一定程度上可以认为GPS动态定位的点到直线的距离越大,则表示精度越差。这种检测方法灵活方便,很容易实现,比较适合做陆地动态测试[7]。
2.5固定基线长度相对检测法
固定基线长度相对检测方法是在一个运动载体上架设2个或2个以上用户接收机来检测其定位精度,将计算得到的相对关系与实际存在的相对关系进行比较,可以在一定程度上反映用户接收机的定位精度。该方法适用于无固定检测点覆盖区域的定位精度检测,如在网络RTK系统覆盖的海域或湖泊上的船舶等运动载体上检测其定位精度。由于该方法检测点间存在固定的边长相对关系,但没有固定的坐标分量相对关系,因此该检测方法存在不能显著反映动态定位各方向分量上精度的缺点。
3 测试结果及分析
为验证上述检测方法的有效性,结合测量工程项目使用某市CORS网络RTK系统,现给出上述3种定位精度检测的结果及分析。
3.1采用静态已知点法检测结果及分析
测试中共选择了31个已知点,这些点都是等级较高的控制点,观测条件良好,有很好的代表性,点位均匀分布在网内外,既有较高等级的GPS控制点,也是较低等级的城市导线控制点。目的是为了比较全面、准确地检验网络RTK系统定位精度,尽量减少测试点自身观测条件对检测结果的影响。测试点情况见表1。
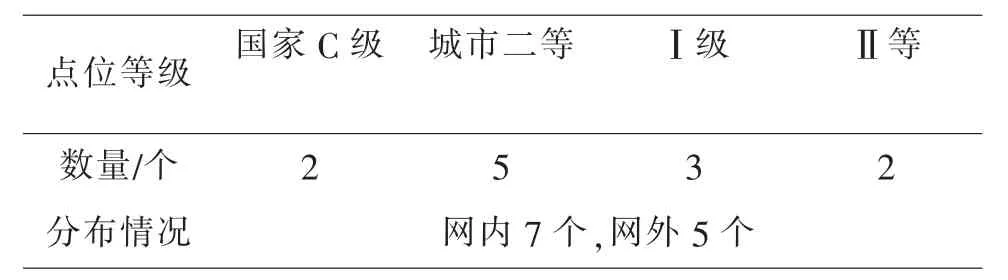
表1 已知点等级及分布情况
内符合精度检测时,流动站在已知点上分别进行四次初始化,每次采集10个历元,进行4个测回的观测,坐标系统采用WGS-84,高程为大地高;外符合精度检测时,求取了1980西安坐标系到2000国家大地坐标系的转换参数。按照式(2)、式(3)分别计算出内、外符合精度,统计结果见表2。

表2 静态已知点检测法内、外精度统计
从表2可看出,网络RTK系统的内符合精度比外符合精度要高,一般高1~2cm,水平方向整体优于2cm,高于设计精度4cm;高程方向优于4cm,高于设计精度5cm,表明了该网络RTK系统实时动态定位稳定可靠。网络RTK系统的外符合精度概率分布比较离散,分散分布在0~5cm之间,外符合精度水平方向整体优于3cm,水平方向最大值为4.5cm,高程方向优于5cm,说明了网络RTK实时动态定位是准确的。
3.2采用后处理结果比较法检测结果及分析
在网络RTK系统覆盖范围内选取7个点,现进行GPS静态测量,后进行实时动态测量,将实时动态测量结果与后处理计算结果进行比较。比较结果统计见表3。
从表3可看出,采用该方法进行检测时,除测试点6坐标差值较大外,其余测试点实时定位精度较高,但均高于设计精度和作业规范规定的坐标较差小于5cm的要求[10]。

表3 与后处理结果比较精度统计
3.3采用反算基线长法检测结果及分析
在网络RTK系统覆盖范围内选取10个点,两点之间相互通视。利用实时动态的定位结果反算出5条基线长,然后使用全站仪对5条边进行距离测量,对二者的结果进行比较。比较结果统计见表4。
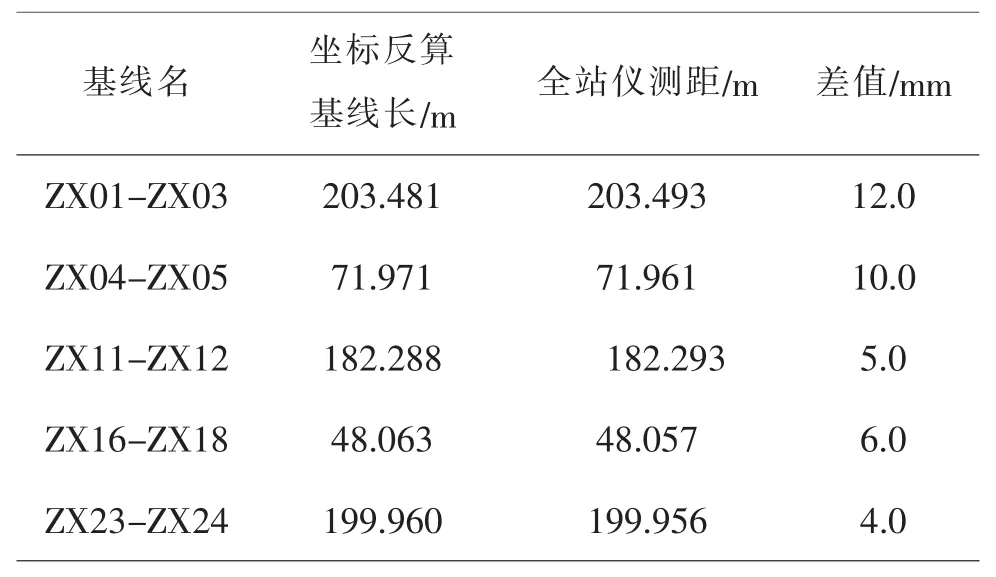
表4 与反算基线长比较结果统计
从表4看出,两者的差值小于作业规范规定的边长较差小于15mm的要求,也在一定程度上反映出了该网络RTK系统的实时定位精度。
4 结束语
网络RTK系统定位精度的检测方法有多种。本文利用了常用的静态已知点检测法、与后处理结果比较法和反算基线长法三种检测方法,对该市的CORS网络RTK系统定位精度进行了检测。检测结果表明,该市的CORS网络RTK系统定位精度可靠性高,其技术指标达到了设计要求,可满足大比例尺测图、工程测量及其他等方面的应用需求。值得注意的是,实际工作中应综合运用各种检测方法,以便更全面、客观地对其定位精度进行检测,并确保定位精度的可靠性。
[1] 王宏伟,杨国林,黄春林.基于兰州市卫星定位连续运行参考站系统的GPS测图控制网建设与应用[J].兰州交通大学学报,2013,32(3):159-160.
[2] 徐文兵.GPS连续运行参考站系统(CORS)定位精度的可靠性研究[D].合肥工业大学硕士论文,2009年4月.
[3] 谢东祺,白云,孟灵飞.几种形式的网络RTK技术比较与应用研究[J].测绘与空间地理信息,2014,37(12):178-179.
[4] 魏二虎,柴华,刘经南.VRS定位算法研究[J].武汉大学学报(信息科学版),2006,31(11):1007-1010.
[5] 黄俊华,陈文森.连续运行卫星定位综合服务系统建设与应用[M].北京:科学出版社,2009.
[6] 蔡成辉,刘立龙,黎峻宇等.CORS定位精度的可靠性研究[J].地理空间信息,2014,12(6):74-75.
[7] 龚真春,杨晋强,白冰等.GPSCORS系统实时定位精度检测方法探讨[J].测绘与空间地理信息,2011,34(3):88-89.
p228
猜你喜欢
卫星应用(2022年7期)2022-09-05
现代苏州(2022年9期)2022-05-26
卫星应用(2022年3期)2022-05-23
文萃报·周五版(2022年9期)2022-03-11
卫星应用(2022年1期)2022-03-09
环球慈善(2019年6期)2019-09-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
计算机测量与控制(2017年6期)2017-07-01
