考虑旋转质量影响的混合动力车辆加速性优化策略
2016-09-14 02:49陈文军王伟达项昌乐
车辆与动力技术 2016年2期
凌 川, 刘 辉,2, 陈文军, 王伟达,2, 项昌乐,2
(1.北京理工大学 机械与车辆学院,北京 100081;2.北京理工大学 车辆传动国家重点实验室,北京 100081;3.内蒙古第一机械集团有限公司第四分公司,包头 014030)
考虑旋转质量影响的混合动力车辆加速性优化策略
凌川1,刘辉1,2,陈文军3,王伟达1,2,项昌乐1,2
(1.北京理工大学 机械与车辆学院,北京 100081;2.北京理工大学 车辆传动国家重点实验室,北京 100081;3.内蒙古第一机械集团有限公司第四分公司,包头 014030)
电子无级传动(e-CVT)混合动力车辆具有无级变速的特性,其旋转质量换算系数δ随无级传动的速比变化,并且与发动机、电机的工作状态密切相关,优化δ对提高加速性能具有重要意义.首先应用动能定理,推导得到了针对电子无级传动车辆的时变旋转质量换算系数的计算式.基于该系数,针对一款电子无级传动混合动力车辆,利用二次规划方法对加速性能进行优化计算,得到了加速性能最优的控制策略,并进行仿真验证.结果表明,基于连续可变旋转质量换算系数得到的加速控制策略有利于混合动力车辆加速性能提升.
混合动力车辆;旋转质量换算系数;电子无级传动(e-CVT);加速性优化;控制策略
加速性能,尤其是加速时间是民用车辆和军用车辆的重要技术指标.对于混联式混合动力车辆,由于其本身具有无级调速的特性,输入输出端的传动比具有时变的特性,整车加速性能不仅取决于发动机的转速转矩,而且与电机的运动特性和传动机构相关[1].
旋转质量换算系数(质量增加系数)广泛用于车辆直线加速性能的计算,将车辆旋转部件的转动惯量转换为整车的平动质量[2-3].在文献[2]中,作者提出了利用动能定理计算加速阻力的方法,并求出了有级传动和无级传动汽车的加速阻力,然而,作者只定义了装有固定传动比变速器汽车的旋转质量换算系数. Aleksander UBYSZ[3]针对乘用车的旋转质量换算系数的计算进行研究,以常见乘用车的惯量数据为基础,得到车轮和发动机离合器飞轮组是影响其旋转质量换算系数最重要的两个因素.
对于固定传动比的车辆,旋转质量换算系数是一个定值,然而,对于具有无级变速特性的混合动力e-CVT车辆,该系数是随工况和速比变化的,需要根据动能定理和车辆动力学基本理论重新计算其旋转质量换算系数.对于CVT车辆,文献[4]利用经验公式计算CVT车辆的旋转质量换算系数,该系数与传动比的平方相关,但没有考虑传动比的变化率对该系数和加速阻力的影响.文献[5]中,作者在计算一款装备CVT的混合动力车辆的阻力时,使用旋转质量换算系数和传动比的变化率计算加速阻力,与文献[2]提出的计算方法一致,这样计算的加速阻力虽然精确,但是较为繁琐,不能直接使用Fj=δma计算车辆的加速阻力.
对e-CVT车辆的性能优化计算,可以假设旋转质量换算系数为定值[6-9],这样的假设有利于简化计算.但是考虑时变的旋转质量换算系数,有利于在混合动力车辆加速阶段更好的分配机电功率流,协调控制发动机、电机的工作状态,从而得到最佳的加速性能.
文中针对一款e-CVT混合动力车辆,推导其连续可变的旋转质量换算系数,建立优化模型,利用二次规划方法针对车辆加速时间进行优化计算,得到加速性能最优的控制策略,对优化结果进行分析验证.
1 旋转质量换算系数推导
1.1传统车辆的旋转质量换算系数计算方法
根据车辆动力学理论,具有固定传动比变速箱的传统内燃机车的通用动力学模型如式(1)所示

(1)

有级变速的车辆的旋转质量换算系数有如下算式[2]

(2)
式中:Iw为车轮的转动惯量, kg·m2;If为发动机飞轮、传动轴和驱动系中旋转部件的转动惯量之和,kg·m2.
在式(2)中,旋转质量包括两部分:一部分是车轮的旋转质量,另一部分为发动机飞轮和传动系中旋转部件的旋转质量.
1.2e-CVT混合动力车辆的旋转质量换算系数
对于具有两个发电机/电动机的混联式混合动力车辆,可以根据动能定理推导其旋转质量换算系数.

(3)
式中:u为车辆平动速度,m/s2;Ip为每个旋转部件的转动惯量,kg·m2;ωp为各旋转部件的角速度,rad/s;Ff为车驶滚动阻力,N;Fw为空气阻力,N;Fi为坡道阻力,N;Tt为驱动力矩,N·m;Tr为传动系的摩擦阻力矩,N·m;rz为主动轮半径,m.
式(3)的等式左边代表整车动能对于时间的微分,右边代表所有外力对于车辆的功率.
对于具有两个电动机/发电机(电机A、电机B)的混联式混合动力车辆,具有EVT1和EVT2双模式[1,10],其传动系如图1所示,运行模式如表1.针对这种具体的双模式混合动力车辆,式(3)可以改写为式(4).
(4)
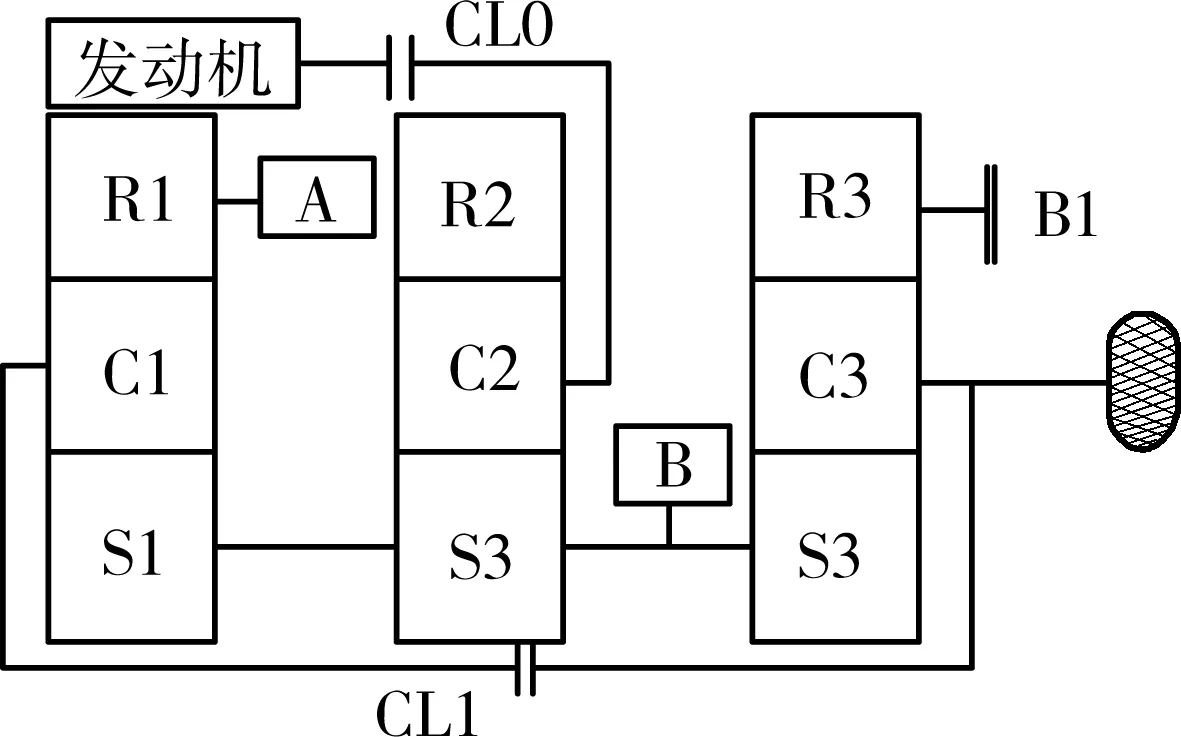
图1 e-CVT车辆传动系简图

模式发动机电机A电机BCL0CL1B1EVT1on发电机电动机●●●EVT2on电动机发电机●●○
注:●接合,○断开.
加速阻力Fj可由式(5)算得,

(5)
式(6)为发动机、电机A和电机B的转速关系.

(6)
式中:a1、a2、b1、b2均为与传动系结构相关的常数,取值如式(7).

(7)
式中:k1、k2、k3分别为3s个行星排的特征参数.
式(8)表示了输出轴转速与车速的关系:

(8)
式中:ic、ih分别为车辆侧传动和汇流排的传动比.
设有系数δ,满足式(9).
Fj=δma.
(9)
旋转质量换算系数δ将旋转体的旋转质量等效换算到整车的平动质量上,由(5)和(9)式,可以根据加速阻力Fj计算旋转质量换算系数δ,计算结果如式(10)所示.

(10)
式中:ne为发动机转速,r/min;ef、ea1、ea2、eb1、eb2均为与系统机械结构相关的常量.
由式(10)可见,δ与两个变量ne/u和dne/du有关,是连续可变的,包含了发动机、电机A、电机B及其输出轴的转动惯量、履带质量、其他旋转部件的转动惯量以及整车质量.与文献[2]中δ计算的区别在于,式(10)将具有无级变速特性的e-CVT车辆旋转质量换算系数和有级变速车辆的旋转质量换算系数统一表达.
对于e-CVT车辆,也可以利用式(9)计算其加速阻力.同时,根据达朗贝尔原理,加速阻力即惯性力等于车辆所受所有力的合力,如式(11)所示.
Fall=δma.
(11)
δ与ne/u和dne/du的耦合关系如图2所示,在车速较低时,ne/u值较大,此时dne/du对δ影响很大.需要注意的是,δ<1代表旋转部件(主要是发动机飞轮和电机A)降速,释放惯性能量,可以作为驱动力克服加速阻力.δ<1对于提高车辆加速性能是有利的,原因在于根据式(11),此时驱动力较小仍能产生较大加速度.

图2 δ与ne/u和dne/du的耦合关系
综上所述,考虑速比变化的旋转质量换算系数能够反映发动机和电机实际工作点的影响,基于连续可变的旋转质量换算系数对加速性能进行优化设计,从而得到加速性能最优的控制策略,是实现优化加速性能的一个新途径.加速性能的优化可以转化为关于发动机电机控制的优化问题,针对该问题,本文对EVT1模式下的0-32 km/h加速过程,提出了一种基于连续可变旋转质量换算系数的加速度最优整车控制策略.
2 基于二次规划法的加速性能优化
2.1建立优化模型
根据车辆动力学理论,车辆在直驶过程中满足基本行驶方程.为了得到最优的加速性能,基于上一节的推导,将式(11)改写为(12).
(12)
忽略行星排中各元件的转动惯量,根据传动系统在EVT1模式下转矩关系式(13)

(13)
电机A的转矩和发动机转矩有上述等式关系,驱动力Ft可以写为式(14).
(14)
由式(12)~(14),建立优化模型.

设计变量:TA,TB,Te,ne,nB

(15)
式中:Pbr为制动电阻的功率,kW.
起步工况电机A作为发电机发动机的负载使用,仅靠电池功率不能满足使用要求,大功率充电也不利于延长电池寿命,因此需要制动电阻配合放电才能最大发挥发动机功率.
由式(12),构造加速能力的目标函数

(16)
由混合动力系统的机械结构决定了发动机电机A、B的转速关系式(6),在EVT1模式下,电机B转速与车速直接相关,在给定车速的情况下,电机A转速与发动机转速直接相关.因此,在特定车速下,车辆加速度只与δ、ne、Te和TB有关,
2.2优化计算与优化结果分析
对0-32 km/h的车速区间做离散化处理,采用二次规划法求得在每个离散车速点的加速度最优解,初始车速设置为零,初始SOC设置为0.6.可以得到优化的发动机转速转矩关于车速的曲线如图3所示.

图3 优化发动机转速转矩随车速变化曲线
图3为优化的车速-发动机转速转矩随车速变化曲线,其转速曲线分为两个阶段:ⓐ发动机降速段;ⓑ发动机升速段.在ⓐ段发动机以最大转矩点起步,达到瞬时最大加速度,加速度的变化曲线如图8.随后发动机转速降低,δ也随之降低,如图4所示,此时整车驱动力Ft保持在最大驱动能力,因此加速度在低车速段主要受δ影响.

图4 驱动力和旋转质量换算系数随车速变化曲线
在车速低于11 km/h时,发动机降速运行,δ也随之降低,但可以注意到如图3所示,由于转速降低,发动机外特性限制了发动机转矩,从而整车驱动力也会降低,如果δ保持不变,整车加速度会降低,但δ是连续可变的,虽然整车驱动力降低,车辆加速度在车速较低时也可能保持最大值;如图4所示,旋转质量换算系数在低车速段变化较大,且存在小于1的情况,因此,在低车速段影响加速度的主要因素不是整车驱动力,而是旋转质量换算系数.
为了证明整车驱动力降低在此时不是影响加速度的主要因素,按照发动机以最高转矩起步,并在低车速段转速保持,制定了基于该规则的发动机转速控制策略,并与基于优化的发动机控制策略对比,基于规则的发动机转速随车速变化的曲线如图5所示.

图5 基于规则和优化加速策略的发动机转速曲线对比
在基于规则的发动机转速随车速变化的曲线中,发动机以3 200 r/min起步,并在车速低于11 km/h时,转速保持3 200 r/min不降速,在高速段发动机升速.
发动机转速以规则制定,发动机转矩保持在外特性曲线,如图6所示,其工作点保持在发动机外特性曲线,输出最高转矩,与基于优化的控制策略一致.发动机、电机A和电机B的转速转矩协调控制关系仍满足式(6)和式(13).图6中,采用优化的加速策略,发动机沿外特性曲线工作,说明发动机能够在相应转速发挥其最大转矩,达到当前转速下的最大功率输出.

图6 基于规则和优化加速策略的发动机工作点对比
图7和图8分别对比了采用规则的控制策略和采用优化的控制策略时,旋转质量换算系数和加速度随车速的变化曲线.在车速低于11 km/h时,采用优化的控制策略,δ降低15.4%,加速度提升20.3%,可见优化发动机转速曲线,改善车辆加速时的δ变化趋势,可以提高车辆加速度,改善加速性能.

图7 两种控制策略下的δ对比
图9中,采用优化的控制策略,车辆0-11 km/h加速时间1.07 s,0-32 km/h加速时间为5.5 s,采用规则的控制策略,车辆0-11 km/h加速时间1.3 s,0-32 km/h加速时间为5.7 s.采用基于优化的控制策略,0-11 km/h加速时间减少17.7%,0-32 km/h加速时间减少3.5%.

图8 两种控制策略下的加速度对比

图9 加速时间对比
3 结 论
提出了连续可变的旋转质量换算系数计算公式,对于一种e-CVT混合动力车辆,该系数反映发动机电机的实际工作点更加准确;发动机飞轮惯量和速比以及速比的变化率对车辆旋转质量换算系数有很大影响.基于该系数,在混合动力车辆优化设计和匹配的研究阶段,不必考虑系统内部各部件的复杂动力学方程.在整车层面,可以利用该系数研究旋转惯量对车辆加速性能的影响,为研究整车控制策略提供了条件.
应用二次规划算法对一款e-CVT混合动力车辆的加速性能进行优化计算,得到了基于可变旋转质量换算系数的加速策略,发动机在最大转矩点起步,在低车速段发动机降速,以降低旋转质量换算系数,有效提高了加速性能.
[1]王伟达, 项昌乐, 韩立金, 等. 双模式机电复合无级传动动态功率控制策略研究[J]. 机械工程学报, 2015, 51(12): 101-109.
[2]余志生, 汽车理论[M]. 北京:机械工业出版社, 2009.
[3]Ubysz A. Problems of rotational mass in passenger vehicles[J]. Transport Problems,2010,5(1):33-40.
[4]胡建军, 秦大同. 金属带式无级变速传动系统速比匹配控制策略[J]. 重庆大学学报: 自然科学版,2001,24(6):12-17.
[5]郑永霞, 赵峰, 罗禹贡, 等. 装备 CVT 的中度混合动力轿车驱动工况下的能量优化策略[J]. 汽车工程,2014,36(1):2-6.
[6]Li X, Xu L, Hua J, et al. Control algorithm of fuel cell/battery hybrid vehicular power system[C]//Proceedings of 2008 IEEE Vehicle Power and Propulsion Conference. Harbin: IEEE, 2008: 1-6.
[7]Ehsani M, Rahman K M, Toliyat H. Propulsion system design of electric and hybrid vehicles: Special section on electric vehicle technology[J]. IEEE transactions on industrial electronics,1997,44(1):19-27.
[8]Mansour C, Clodic D. Dynamic modeling of the electro-mechanical configuration of the Toyota Hybrid System series/parallel power train[J]. International Journal of Automotive Technology,2012,13(1):143-166.
[9]Kliauzovich S. Analysis of control systems for vehicle hybrid powertrains[J]. Transport,2007,22(2):105-110.
[10]Xiang Changle, Qi Yunlong, Han Lijin. Efficiency-based control strategy of dual-mode hybrid vehicle[C]//Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), 2014 IEEE Conference and Expo. Beijing:IEEE,2014:1-5.
Acceleration Optimization Based on Variable Rotational Mass Coefficient for a Hybrid Vehicle
LING Chuan1,LIU Hui1,2,CHEN Wen-jun3,WANG Wei-da1,2,XIANG Chang-le1,2
(1.School of Mechanical Engineering, Beijing Institute of Technology, Beijing, 100081, China;2.State Key Laboratory of Vehicle Transmission, Beijing Institute of Technology, Beijing, 100081, China;3.The Fourth Branch Company, Inner Mongolia First Machinery Group Co.Ltd, Baotou, 014030, China)
A hybrid electric vehicle (HEV) with an electronic-continuously variable transmission (e-CVT) has the characteristics of continuously variable speed ratios. The rotational mass coefficient δof the vehicle is changed with the speed ratios of the transmission, and is closely related to the working states of the engine and the motors. Optimization of the coefficient has an important significance for improving the accelerating performance of the vehicle. By applying the Kinetic energy theorem, a calculation formula of the rotational mass coefficient is derived for an e-CVT vehicle. Based on the quadratic programming (QP) method to optimize the accelerating performance of the vehicle, the optimal control strategy is obtained, and the simulation is verified. The results show that the strategy based on the rotational mass coefficient is beneficial to improve the accelerating performance of the e-CVT hybrid vehicle.
HEV;rotational mass coefficient;electronic-continuously variable transmission(e-CVT);acceleration optimization;control strategy
1009-4687(2016)02-0001-06
2015-9-21
凌川(1990-),男,硕士,研究方向为混合动力车辆技术.
U461.2
A
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
防爆电机(2022年2期)2022-04-26
物流技术与应用(2020年4期)2020-05-06
装备制造技术(2018年8期)2018-10-17
中国自行车(2018年8期)2018-09-26
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年1期)2016-04-16
微特电机(2015年1期)2015-07-09