平方根UKF算法在汽车轮胎力估计方法中的应用
2016-09-14 02:49范学琼曾丽华
车辆与动力技术 2016年2期
吴 涛, 范学琼, 焦 静, 曾丽华
(1.陕西重型汽车有限公司,西安 710200;2.轻工业钟表研究所,西安 710032;3.第四军医大学放射医学教研室,西安 710032)
平方根UKF算法在汽车轮胎力估计方法中的应用
吴涛1,3,范学琼1,焦静2,曾丽华3
(1.陕西重型汽车有限公司,西安 710200;2.轻工业钟表研究所,西安 710032;3.第四军医大学放射医学教研室,西安 710032)
针对车辆行驶过程中各车轮轮胎力等状态参数,在现有测量水平及成本下难以找到较适用的传感器直接测量的问题,提出利用七自由度车辆动力学模型结合平方根UKF算法的汽车轮胎力估计方法.利用该算法具有的无需计算雅可比矩阵和较高的非线性近似精度等优点,在无需建立轮胎力学模型的前提下,确保了迭代UKF的数值稳定,实现对汽车轮胎力估计.应用CarSim软件进行仿真对比试验,仿真结果表明,基于平方根UKF的汽车轮胎力估算方法对各轮胎的纵向力和侧向力估计比较准确,验证了该方法的有效性.
平方根UKF;车辆动力学;状态估计;轮胎力
车辆稳定性控制系统(Vehicle Stability Control,VSC)是当前汽车防滑装置的高级形式,极大地提高车辆的主动安全性[1-2].而获得准确可靠的传感器(或称观测器)信号对于系统开发尤为重要,也是系统实现有效闭环反馈控制的前提和必要条件[3].目前,诸如轮胎力、紧急制动下侧纵向速度、路面附着系数等参数在现有测试水平和测试成本下尚无法找到可靠、低成本的传感器直接测量方法.为实现车辆主动安全系统的开发,国际汽车电控产品供应商提出一系列估算公式来解决这种状态信息不完全性问题[4].利用已有的传感器信息(轮速、方向盘转角、侧纵向加速度和横摆角速度)和简单的车辆动力学模型对轮胎力等进行估计.
近年来,从学术研究角度,国际学者针对汽车的轮胎力难以测得问题已进行了大量研究,包括文献[5]通过试验性的近似模型推导轮胎力的值,但受试验工况限制,计算结果具有局限性.文献[6]提出基于轮胎纵向力经验模型的观测器方法;文献[7]提出由一组微分方程来描述轮胎纵向力和表征路面状况参数之间关系的轮胎纵向力解析模型的辨识方法.而这些模型与轮胎-道路接触面的真实受力行为之间仍有明显差异.文献[8]基于人工智能领域理论,提出神经网络模型轮胎力不确定性补偿方法,但该方法的映射关系难以确定.文献[9-10]设计滑模观测器,实现对车辆参数和轮胎力估计,得到较好效果,但观测器中滤波时间常数和增益的选取比较困难,需要大量的试验.文献[11]基于非线性车辆动力学模型,利用扩展卡尔曼滤波方法对轮胎力进行估计,采用递推求解的方式,得到较好效果,但不足是求解过程中需要求导非线性函数的雅克比矩阵.
文中的研究以软件算法代替硬件传感器的参数软测量角度出发,开展基于车辆多自由度非线性动力学模型和非线性状态估计方法的汽车轮胎力软测量算法研究.研究中基于软测量理论和离散信号滤波理论,并结合七自由度非线性车辆模型,建立了基于SR-UKF的汽车纵向位移、侧向位移、横摆角位移和4个车轮的回转运动的软测量模型.利用汽车动态模拟与分析软件CarSim进行仿真试验,并将算法的轮胎力估计值与相同工况下CarSim的仿真结果进行了比较分析.
1 七自由度非线性车辆模型
假定汽车在水平路面上行驶,汽车质心作为车体坐标系的坐标原点;X轴为汽车纵向对称轴,规定向前为正;Y轴通过质心,规定向左为正;所有角度及水平面内力矩以逆时针方向为正,所有的矢量的各分量以与坐标轴同向为正.建立的车辆动力学模型如图1所示.整车共有七个自由度,分别为:汽车纵向位移、侧向位移和横摆角位移3个整车运动自由度,再加上4个车轮的回转运动自由度.并提出如下假设:固结于汽车上的动坐标系原点与汽车质心重合;忽略悬架的作用,汽车没有垂直运动;汽车没有绕Y轴的俯仰运动和绕X轴的侧倾运动;汽车各轮胎的机械特性相同.
忽略方向盘至转向轮之间的传动部件惯性及阻尼.为了问题的简化,认为方向盘转角与前轮转角成线性关系,且两前轮转角相同.建立的七自由度车辆模型的动力学方程如下
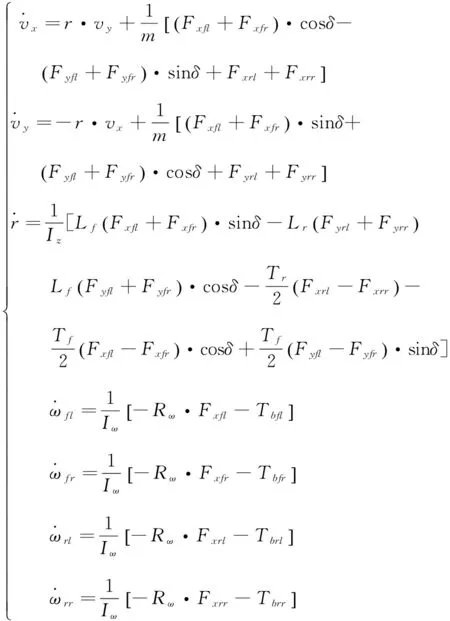
(1)
式中:vx为车辆纵向速度、vy为车辆侧向速度、r为横摆角速度、m为车辆质量、Lf为质心距离前轴的距离、Lr为质心距离后轴的距离、Tf为前轮距、Tr为后轮距、Iz为绕z轴转动惯量、Iw为单个车轮转动惯量、Rw为车轮滚动半径、ωij为车轮回转角速度、δ为前轮转角、Fxij为轮胎纵向力、Fyij为轮胎侧向力、Tbij为制动器制动力矩.

图1 七自由度车辆动力学模型
2 建立SR-UKF的轮胎力滤波器
针对目前已经发展的大多数轮胎模型存在的与轮胎-道路接触面的真实受力行为之间还有着明显差异的问题,提出一种不需要建立轮胎模型的对车辆轮胎力估计方法.
根据七自由度的非线性车辆模型分别定义状态矢量、量测矢量和控制输入为
x(t)=[vxυyrωflωfrωriωrr]T,
z(t)=[axayrωflωfrωrlωrr]T,

式中:ax和ay分别为车辆在大地坐标系中的纵向和侧向加速度,且

(2)

(3)
状态方程为:

,
(4)
量测方程为

,
(5)
式中:w(t)和v(t)分别为过程噪声和量测噪声,均为相互独立的均值为零的高斯白噪声.




(6)
式中:y0表示要估计的力;y1为其一阶导数;wy为随机噪声.
建立扩维后的状态方程为

(7)
扩维后的状态方程:

(8)
扩维后的量测方程:

(9)
基于上述状态方程和量测方程,设计SR-UKF滤波过程.需要注意的是滤波器的估计精度与各协方差矩阵P、状态噪声协方差Q、量测噪声协方差R的选取密切相关,不合理的取值会使得估计精度大大降低甚至导致估计的发散.为了得到比较精确的滤波结果,它们的值需要经过数次试验获得,参数匹配工作量大.
3 SR-UKF算法[12]
对如下一个非线性非高斯系统:

(10)
UKF算法流程如下:
1)初始化:



a) 计算Sigma点:

b) 时间更新:
χk|k-1=f[χk-1],


c) 量测更新:
yk|k-1=h[χk|k-1],







式中:L为状态矢量维数;λ为比例参数;Wi为权、chol表示Cholesky分解函数、qr表示QR分解函数、cholupdate表示Cholesky分解更新函数.
4 仿真实验
为了验证本文提出的基于平方根UKF的车辆轮胎力估计方法的准确性及有效性,利用汽车动态模拟与分析软件CarSim进行仿真试验,将轮胎力估计值与相同工况下CarSim的仿真结果比较分析.
仿真试验所选取的车辆模型为CarSim内置的前轮驱动B级轿车模型,选取的行驶工况为模拟在实际驾驶过程中紧急转向且伴随制动操纵的工况,即双移线制动试验.在CarSim内设置起始车速为120km/h,路面附着系数为0.85.图2-5为通过SR-UKF算法获得的轮胎纵、侧向力估计值和CarSim仿真得出的轮胎侧、纵向力结果的对比曲线.
从对比曲线中可以看出,在车辆进行急剧转向同时伴随制动操纵的情况下,本算法对各轮胎力的估算值与CarSim的仿真结果能取得较好的一致性,曲线的变化趋势基本吻合.在轮胎力发生突变且幅度巨大时,如图5,右后轮纵向力的估计值出现了一定的波动,但在短暂时间内(约0.8秒)迅速收敛,与真实值非常接近.

图2 左前轮轮胎力

图3 右前轮轮胎力

图4 左后轮轮胎力

图5 右后轮轮胎力
5 结 论
文中建立的汽车七自由度动力学模型,可较好地反应车辆的侧向、纵向、横摆和4个车轮回转运动的动态特性.在此基础上,利用SR-UKF状态估计方法可以直接利用汽车七自由度非线性动力学方程进行计算,而无需对其进行模型线性化及计算雅克比矩阵和自身具有的较高非线性近似精度等优点,将轮胎力作为待估计的未知参数,在无需建立轮胎力学模型的前提下,实现了汽车各车轮轮胎力估计.通过与CarSim仿真软件结果对比表明,基于平方根UKF的汽车轮胎力估计方法对轮胎纵向力和侧向力的估计具有良好的效果.在难以直接测量这些汽车状态参数的情况下,SR-UKF状态估计方法是一种行之有效的研究思路,并在一定程度上解决了汽车主动安全控制系统中存在的信息不完全性,为ESC等先进汽车底盘电控系统研究提供了一条新的研究技术路线.
[1]AgaM,OkadaA.Analysisofvehiclestabilitycontrol(VSC)'seffectivenessfromcrashdata[C]//18thESVConference.Nagoya:ESVC. 2003: 541-547.
[2]LieA,TingvallC,KrafftM,etal.TheEffectivenessofESP(ElectronicStabilityProgramme)inReducingRealLifeAccidents[J].TrafficInjuryPrevention, 2004, 5(1): 37-41.
[3]黄炳华, 陈祯福.ESC的最新动向和发展趋势[J]. 汽车工程, 2008, 30(1): 1-9.
[4]ZantenAT,RobertBsoch.BoschESPSystem: 5YearsExperience[J].SAE, 2000-01-1633.
[5]MullerS,UchanskiM,HedrickK.Estimationofthemaximumtire-roadfrictioncoefficient[J].Journalofdynamicsystems,measurement,andcontrol, 2003, 125(4):607-617.
[6]Li L, Wang F Y, Shan G L, et al. Design of tire fault observer based on estimation of tire/road friction conditions[J]. Acta Automatica Sinica, 2003, 29(5): 695-702.
[8]Baffet G, Charara A, Lechner D. Experimental evaluation of a sliding mode observer for tire-road forces and an extended Kalman filter for vehicle sideslip angle[C]//Decision and Control, 2007 46th IEEE Conference on. IEEE, 2007: 3877-3882.
[9]Shraim H, Ananou B, Fridman L, et al. Sliding mode observers for the estimation of vehicle parameters, forces and states of the center of gravity[C]//Decision and Control, 2006 45th IEEE Conference on. IEEE, 2006: 1635-1640.
[10]Dakhlallah J, Glaser S, Mammar S, et al. Tire-road forces estimation using extended Kalman filter and sideslip angle evaluation[C]//American Control Conference, 2008. IEEE, 2008: 4597-4602.
[11]Baffet G, Charara A, Lechner D. Experimental evaluation of a sliding mode observer for tire-road forces and an extended Kalman filter for vehicle sideslip angle[C]//Decision and Control, 2007 46th IEEE Conference on. IEEE, 2007: 3877-3882.
[12]Van Der Merwe R, Wan E A. The square-root unscented Kalman filter for state and parameter-estimation[C]//Acoustics, Speech, and Signal Processing, 2001. Proceedings.(ICASSP'01). 2001 IEEE International Conference on. IEEE, 2001, 6: 3461-3464.
Vehicle Tire Force Estimation Based on Square-rootUnscented Kalman Filter
WU Tao1,3,FAN Xue-qiong1,JIAO Jing2,ZENG Li-hua3
(1.Shaanxi Heavy-Duty Truck Co., Ltd., Xi'an 710200;2.Horological Research Institute of Light Industry, Xi'an 710032;3.Department of Radiation Medicine, The Fourth Military Medical University, Xi'an 710032)
Based on the status quo, it is difficult to find some suitable sensors to directly measure the state parameters, such as the tire force of each wheel, for a moving vehicle. A method for estimating the tire force is put forward by using the Square-root Unscented Kalman Filter (UKF) algorithm in a 7 degree of freedom vehicle dynamic model. By means of the advantages of the algorithm in a higher nonlinear approximation accuracy without needing to compute the Jacobian matrix, the estimation of the tire forces is implemented and the numerical stability of the iterated UKF is guaranteed without needing to set up a mechanical model of the tire. A comparison with the simulation result in CarSim shows that the longitudinal and lateral forces of each tire are estimated more accurately and the method is of effectiveness.
the square-root unscented kalman filter; vehicle dynamics; state estimation; tire force
1009-4687(2016)02-0005-05
2016-3-14
陕西省自然科学基金项目(2015JM8454);总后卫生部项目(BWS14J035)
吴涛(1982-),工程师,博士,研究方向为汽车底盘电控系统开发和汽车动力学计算与分析.
U461.6
A
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·七年级数学人教版(2018年3期)2018-05-30
中学生数理化·七年级数学人教版(2018年3期)2018-05-30
中学生数理化·七年级数学人教版(2017年3期)2018-01-20
中学生数理化·七年级数学人教版(2017年3期)2018-01-20
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19