运动物体轮廓扫描系统的设计与实现
2016-09-20 09:20闪静洁黄小平
新乡学院学报 2016年3期
金 建,闪静洁,黄小平
(安徽新华学院 电子通信工程学院,安徽 合肥230088)
运动物体轮廓扫描系统的设计与实现
金建,闪静洁,黄小平
(安徽新华学院电子通信工程学院,安徽合肥230088)
设计了多模块电路和MK60DN512最小系统,增加了对轮廓图像的滤波和边缘的处理算法,实现了运动物体轮廓的扫描和显示。系统通过光电管组成的采集模块采集数据,由MK60DN512单片机组成的主控模块进行数据处理,处理后的数据通过无线发送模块发送,由接收模块接收并在液晶屏上实时显示。测试结果表明,系统不仅能够实时、清晰地捕捉两个不同运动速度的物体的二维轮廓图,而且能够记录和显示物体运动的时间、速度等参数。
MK60DN512;光电管;无线模块;轮廓;边缘检测
运动物体轮廓扫描在目标识别、运动检测与跟踪以及视频压缩等方面都起着重要作用,例如通过判别路口物体轮廓,可以区分行人、自行车和汽车。目前有很多种运动物体轮廓检测方法,例如采用背景减法提取运动目标的轮廓,然后运用轮廓的边界不变矩特征和形态学特征,构建一个轮廓特征向量的模型[1]。本文拟设计一套系统来实现数据的采集、传送、处理和显示,能通过图像算法检测出图像的轮廓特征图,同时计算出运动物体通过检测设备的速度和时间,且需具有识别精度高、运行效率高、实时性好等特点。
1 总体设计方案
本系统总体上分为发射端和接收端,按模块可以划分为信息采集模块、电源模块、主控模块、图像显示模块、无线发送与接收模块以及按键模块。如图1和图2所示。
运动物体轮廓的检测和显示主要由两部分组成:一部分是数据的采集、处理和发送,即传感接收部分接收光电传感器发来的数据,并传给最小系统,最小系统根据数据和时间周期进行分析处理,并将结果传送给手持设备;另一部分是发送端数据的接收,并根据有机发光二极管(Organic Light-Emitting Diode,OLED)显示模块的分辨率处理图像信息,使物体轮廓能够自适应地在OLED上显示。同时,接收端也可以通过无线信号控制传感器采集数据,并计算出物体的运动速度大小。
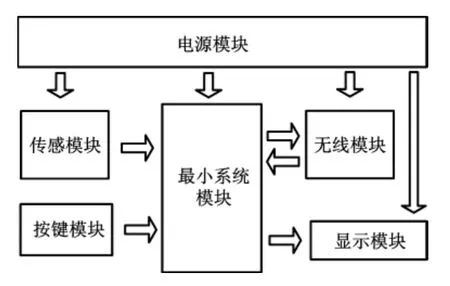
图1 系统发射端
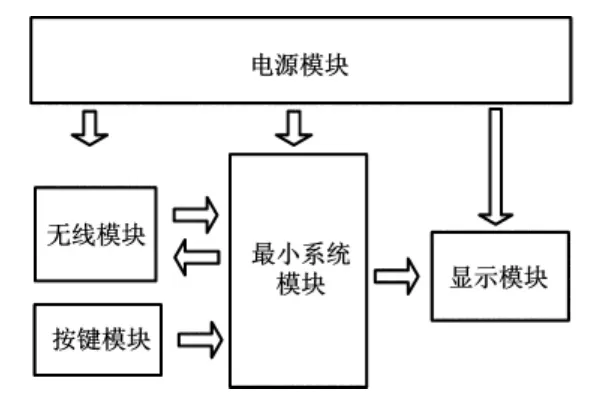
图2 系统接收端
2 硬件设计与实现
2.1硬件系统构成
20只光电开关[2]单列均匀安装在2 m高的木杆上,系统等时间间隔读取这些光电开关的状态,用于显示图像轮廓。另有两只光电开关水平安置,用来计算物体通过的时间,进而计算出物体的运动速度和宽度。物体高度可由光电开关安装位置直接读出。显示过程中,高度和宽度可根据高宽比进行调整,以选择最合适的显示比例,避免出现图像过小或过大的情况。实物图如图3所示。

图3 实物图
2.2硬件单元电路
硬件系统由MK60D512最小系统板[3]、红外光电开关传感器模块、无线2.4G NRF2401模块[4]、电源电路模块、按键电路模块、OLED显示电路模块以及拨码开关电路构成。
MK60DN512最小系统板通过计算两个光电开关检测到的数据得到运动物体的速度,并将数据通过无线2.4G NFR2401发给无线数据接收模块。
本系统有20只E18-D80NK漫反射光电开关组成的单列稀疏的传感器组,该传感器组具有探测距离远、受可见光干扰小、使用方便等特点。当经过的被检测物体将光电开关发射出的光线反射到接收器后,光电开关就会产生开关信号,这些信号经过处理就可得到运动物体轮廓的数字信号。
NRF2401是一款新型单片射频收发器件[5],内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,并融合了增强型Shock Burst技术,其输出功率和通信频道可通过程序进行配置,具有自动应答和自动再发射功能,片内可自动生成报头和CRC校验码,且与NRF24系列的其他射频器件相兼容。
物体轮廓显示部分采用OLED显示屏,这种显示屏具有可自发光、对比度高、体积小且分辨率高等优点。OLED显示模块提供了5种接口,本设计采用4线串行的SPI接口,由控制单元处理数据并驱动显示屏,显示出物体的大致轮廓和物体的运动速度。
电源采用7.2 V充电电池。为了获取电路各部分所需电压,使用了AMS1117-5V和AMS1117-3.3V两种稳压芯片。红外光电开关的正常工作电流为100 mA,电路中共采用了22个红外光电开关,且部分红外光电开关需分开供电,故这部分使用了3片AMS1117-5V芯片供电,该芯片可输出1 A电流,能够满足需要。AMS1117-3.3V芯片被用于给单片机最小系统板、OLED显示模块以及无线2.4G NRF2401模块供电。
另外,系统的按键主要用来调节参数及实现功能的切换,而显示模块用来显示物体运动轨迹。
2.3软件设计
2.3.1数据采集与发送模块
数据采集与发送模块主要用来采集光电开关的数据和运动物体的轮廓数据,并将所采集的数据通过无线2.4G NRF2401模块发送给数据接收模块,流程如图4所示。
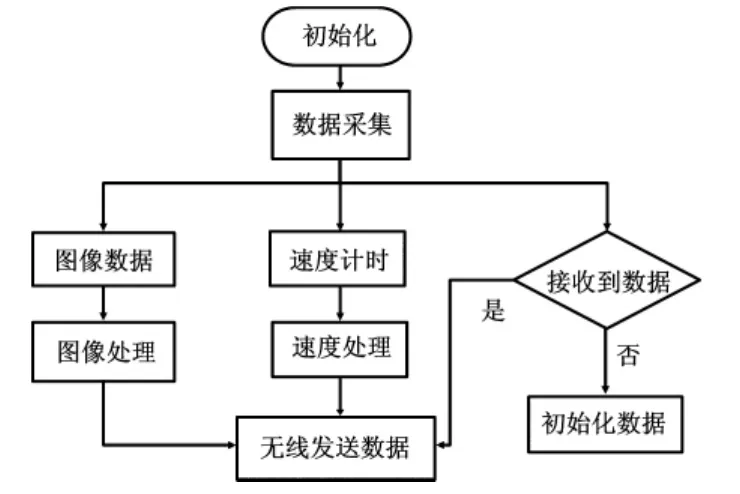
图4 主控模块流程图
2.3.2数据接收模块
接收模块软件流程图如图5所示。模块主要接收和处理来自传感器模块采集的图像等数据,并以32× 32像素显示采集来的图像,同时显示运动物体的速度和时间。
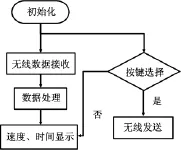
图5 接收模块流程图
2.4数据处理
在处理组成物体轮廓的像素点的时候,采用像素点逐个绘制的处理方法易造成像素点丢失,无法绘制完整的物体轮廓。为了解决此问题,本文采用的方法是将同一列连续8个像素点同时写入,这样既不易丢失像素点,又不需要按位操作,提高了单片机的运行效率。
本文采用两种轮廓显示方案,这两种方案均可通过按键调整显示方式。两种轮廓一种是外部线条,即通过一系列数据模拟得到运动物体的外边界线;另一种是实心显示,即显示物体的投影图。
在显示物体轮廓时,会出现高度和宽度比例失真的情况,使物体轮廓在32×32像素的图像中显示偏大。这主要是由于20路光电管均匀分布在同一条直线上,因此在屏幕上显示的高度范围相对固定,而由计算得到的物体的宽度会随着物体速度的变化而变化。本文根据物体实际的高、宽对图像进行适当缩放,使物体轮廓可以在32×32像素的屏幕中以适当的大小进行显示。数据的处理主要有以下几部分。
(1)图像平滑[6]。对图像的边缘进行处理[7],使图像边缘尽可能连续,看起来更平滑。
(2)图像轮廓提取。运动物体运动经过传感器时,传感器被触发并采集图像数据,单片机开始计数。运动物体消失后,单片机计算时间并将运动的时间按比例划分,同时,处理传感器采集的数据,从中取出可信的数据,以此判断物体的高和宽,得到20×20像素的图像数据。
3 实验测试
3.1实物测试
实物以固定速度1.5 m/s通过光电传感器,实物模型及得到的显示图像如图6所示。
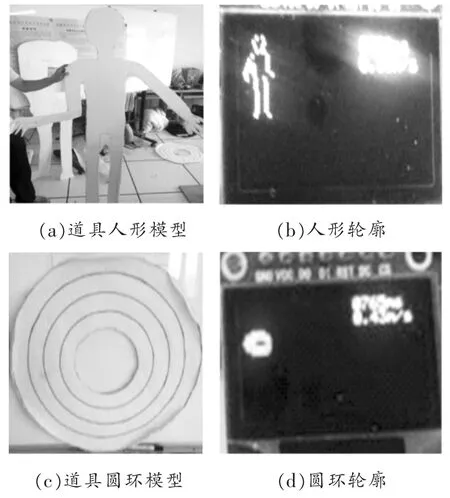
图6 实物模型及显示轮廓图像
实验分别选取了人体轮廓模型和环形模型进行测试,图6(a)和(c)是模型原型,图6(b)和(d)是扫描系统显示的轮廓图。分别对比这4幅图,可以看出,道具模型和OLED显示屏显示的轮廓模型很相似,测试结果基本达到了设计要求。
3.2速度测试
使物体匀速通过扫描装置,实际速度与系统测量速度如表1所示。由表1可知,所测速度与实际速度基本相等,实现了运动物体的测速功能。
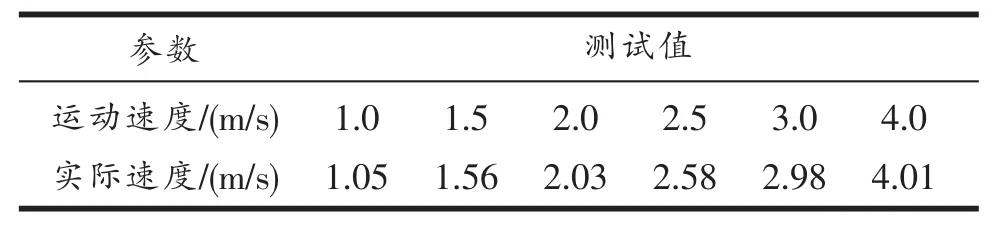
表1 速度测试参数
4 结束语
运动物体轮廓检测系统实现了对1到2个速度为1~4 m/s运动物体的图像轮廓显示[8]的同时进行测速的功能。图像采用32×32像素输出,为便于观察,添加了图像放大、缩小的功能。系统不足之处是,当有两个以上不同速度物体同时通过时,就无法有效区分,且在显示运动速度较快的物体时,出现了高宽比失真的情况。系统处理能力还有待进一步提高。
[1]杜宇人.一种基于轮廓特征的运动目标识别方法[J].江苏大学学报(自然科学版),2009(5):514-517.
[2]程融,刘进.基于光电管的智能车路径识别研究[J].兵工自动化,2009(12):9-12.
[3]陈学青,陈永德.单片机开发最小系统实验板[J].科技资讯,2008(31):26-26.
[4]李庆山,戴曙光,穆平安.nRF2401无线模块在测控系统中的应用[J].电测与仪表,2006(8):58-59.
[5]曹立华.图像处理及存储显示一体化系统设计[J].新媒体研究,2015(14):19-20.
[6]李俊生.一种图像平滑处理方法的空域算法与频域分析[J].常州工学院学报,2004(2):30-33.
[7]蒋爱花,邢济收.图像边缘处理技术[J].科学技术与工程,2005(5):298-300.
[8]于成忠,朱骏,袁晓辉.基于背景差法的运动目标检测[J].东南大学学报(自然科学版),2005(S2):159-161.
【责任编辑梅欣丽】
Design and Implementation of the Scanning System for Moving Object Contour
JIN Jian,SHAN Jingjie,HUANG Xiaoping
(School of Electronics and Communication Engineering,Anhui Xinhua University,Hefei 230088,China)
This paper designed a multi-module circuit and MK60DN512 minimum system,and added the algorithm processing for the filtering and the edge of the contour image.The system was composed of a photoelectric tube for collecting data,and then the main control module composed of MK60DN512 single chip was used to process data,and the data was transmitted to the receiving module through the wireless transmitting module and was displayed on the LCD screen in real time.Test showed that the contour map was not only able to capture the 2D contour of the moving objects in real time,but also record and display the time and speed of the moving object.
MK6ODN512;photoelectric tube;wireless module;contour;edge algorithm
TP212.9
A
2095-7726(2016)03-0057-04
2015-11-12
安徽省教育厅重点项目(KJ2014A097);国家大学生创新计划(201412216011,201412216012)
金建(1985-),男,安徽合肥人,讲师,硕士,研究方向:智能控制、图像处理和嵌入式系统。
猜你喜欢
装备制造技术(2020年1期)2020-12-25
商品与质量(2020年33期)2020-11-07
中学生数理化·高一版(2020年1期)2020-02-20
制造技术与机床(2019年11期)2019-12-04
现代商贸工业(2018年31期)2018-12-08
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
中国交通信息化(2017年4期)2017-06-06
智富时代(2015年3期)2015-05-22
智富时代(2015年3期)2015-05-22
科普童话·百科探秘(2015年4期)2015-05-14