
基于机载LiDAR的铁路轨道提取方法研究
2016-09-23 08:51于海洋牛峰明马慧慧
河南城建学院学报 2016年4期
罗 玲,于海洋,2,牛峰明,马慧慧
(1.河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000; 2.河南理工大学 矿山空间信息技术河南省重点实验室,河南 焦作 454000)
基于机载LiDAR的铁路轨道提取方法研究
罗玲1,于海洋1,2,牛峰明1,马慧慧1
(1.河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000; 2.河南理工大学 矿山空间信息技术河南省重点实验室,河南 焦作 454000)
铁路轨道是铁路基础设施对象测绘定位中的关键要素。高分辨率遥感影像含有丰富的地物信息,而机载激光雷达数据包含有高精度的高程信息,两种数据的有效结合有利于提高铁路轨道的提取精度。首先根据铁路的光谱、局域地形等特征,综合利用机载LiDAR和影像数据,建立了一种面向对象的铁路区域提取算法,通过数学形态学处理消除干扰因素的影响,获取铁轨区域的LiDAR点云数据,然后根据铁路轨道点云高度特征进一步分离轨道点云,最后通过最小二乘法对轨道点云数据进行精确拟合,获取轨道信息。通过实验分析,验证了上述方法的有效性。
铁路轨道;面向对象;机载LiDAR;最小二乘法
机载激光雷达(Light Detection and Ranging,LiDAR)是一种综合利用激光、全球定位系统(Global Position System,GPS)、惯性导航系统的数据采集技术。与传统航空摄影测量技术相比,具有自动化程度高、受天气影响小、数据生产周期短、精度高等特点[5]。本文以机载LiDAR获取的激光点云数据和航空影像为数据源,充分利用LiDAR点云数据精确的地物高程信息,航空影像具有高分辨率的纹理、光谱等信息[6],将两者优势互补。首先基于影像的光谱信息和空间信息采用面向对象的提取方法,利用多尺度分割算法获取分类对象,并根据铁路地物要素特征提取铁路区域,然后将铁路区域叠加到点云数据,得到铁路上的点云,最后对得到的铁轨点云进行拟合,得到铁轨线。
1 面向对象铁路提取原理
面向对象信息提取技术是一种智能化的影像分类技术,图像的最小单元不再是单个的像元,而是一个个对象[7]。相比单个像元,分割对象具有更多的语义信息,分类过程中的特征选取及规则建立均是基于目标对象进行的。面向对象分类技术在分类过程中,考虑了地物的纹理、形状、尺寸等空间特征,以像元的空间特征辅助光谱信息,提高分类精度[8]。面向对象的铁路提取信息提取主要包括两方面的工作:一是影像分割,二是分类。
1.1影像分割
多尺度分割算法基于区域合并技术,从任一个像素开始合并直至形成一个对象(影像区域)[9]。其基本思想是:从一个像元开始,分别与其邻近像元进行计算,以降低最终结果的异质性,当一轮合并结束后,以上一轮生成的对象为基本单元,继续分别与它的相邻对象进行计算,这一过程将一直持续到用户指定的尺度上已经不能进行任何对象的合并为止。
对象异质性阈值F基于光谱异质性Δhcolor和形状异质性Δhshape来计算:
(1)
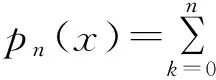
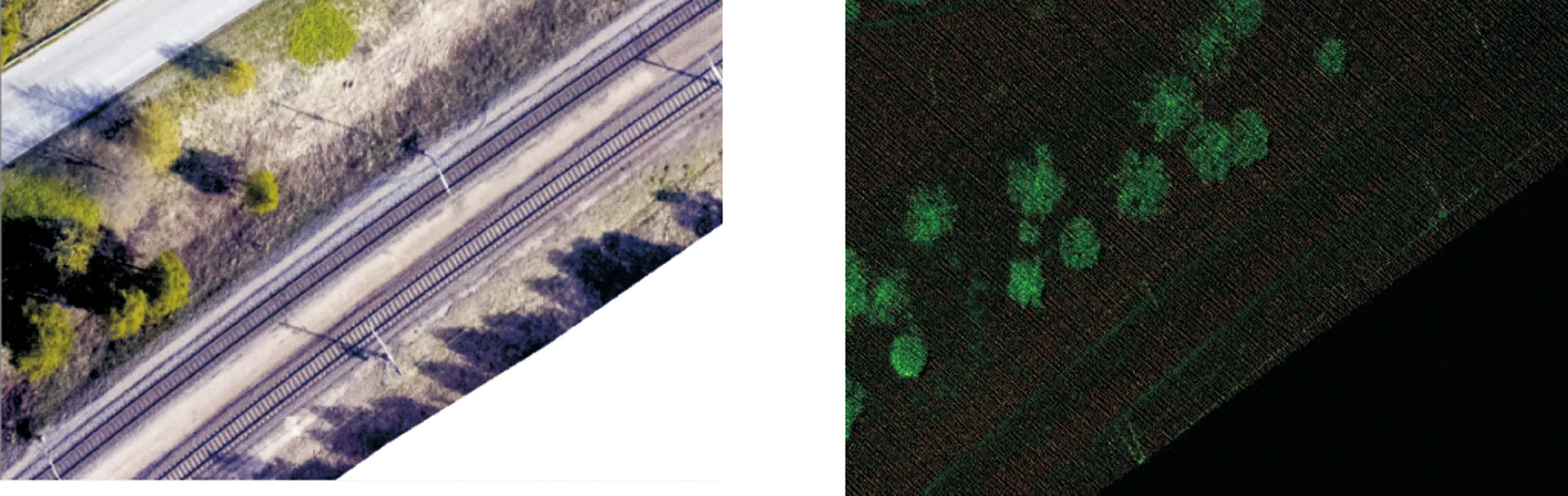
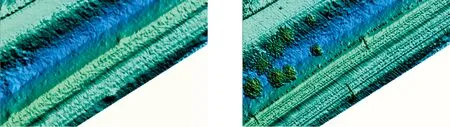
式中,wcolor为光谱信息权重,wshape为形状信息权重,取值均在0到1之间。形状异质性包括光滑度和紧致度两个方面。如果两个相邻对象需合并,则要求F 1.2分类规则的建立 每种地物都有各自的特征,将这些特征添加到函数中来制定规则,可以将地物准确分类出来。对于铁路这种具有明显线性特征的地物,分类时首要考虑它的空间特征。例如可以利用长宽比(L/W)作为分类规则,公式为: (2) 式中,Length,Width分别为分割对象长度和宽度。 再如铁路旁的低矮植被,主要通过绿色植被指数Greenness提取,公式为: (3) 式中,R、G、B分别是航空影像的红、绿、蓝波段。 通过机载雷达点云数据得到铁轨线,可以对分类得到的铁轨点云进行拟合,从而得到一个较为简单的空间曲线,该曲线是对铁路轨道的近似表示。已知一条空间曲线的参数方程表达式为: 现场检测设备由水位计(超声波水位计、雷达水位计、投入式水位计等可选)、翻斗式雨量计和工业照相机组成,负责计量水库水位、降雨量数据,并对水库现场进行拍照。 X=x(t),Y=y(t),Z=z(t) (4) 令x=t,则有 (5) 其中,y=y(x)相当于空间曲线关于xoy的投影柱面(以空间曲线为准线,垂直于所投影的坐标面);z=z(x)相当于空间曲线关于xoz的投影柱面。因此,两个方程分别代表两个空间柱面,联立可得到两个柱面的交线,即空间曲线。 现令pn(x)=a0+a1x+a2x2+…满足条件: (6) 其中,I为a0、a1、a2…an的多元函数,因此上述问题可以转化为求I的极值问题。因此求上述问题即为求I=I(a0、a1、a2…an)的极值问题。由多元函数求极值的必要条件得: (7) 即 (8) 式(7)是关于a0,a1,a2,…,an的线性方程组,用矩阵表示为: (9) 综上所述,分别求出两个投影柱面的多项式系数,即为求得空间曲线方程。 3.1数据获取 本文选用芬兰某地一段铁轨为试验区,该地区地势平坦。图1所示为该地的高分辨率遥感影像,拍摄时间2010年5月16日,分辨率0.2 m。如图2所示,机载扫描数据于2010年5月20日采用徕卡ALS50扫描获取,飞行高度2000 m,高程精度15 cm,点云间隔30 cm,点云密度15个/m2。 3.2数据预处理 机载LiDAR点云数据处理过程:首先检测和去除其中的系统误差和粗差点,采用自适应TIN方法进行滤波分类,分类出地面点和非地面点[11],然后基于Kriging插值方法建立DEM(如图3),同时利用机载LiDAR第一次返回数据建立数字表面模型DSM(如图4)。用DSM减去DEM可得到地物的高度信息,该模型被称为nDSM(normalized Digital Surface Model,nDSM)[12]。nDSM可用于区分铁路与公路等,能直接消除地形对滤波结果的影响。试验中采用的nDSM空间分辨率为1.4m,航空影像的空间分辨率为0.2m。数据处理前先采用DSM对航空影像进行正射校正,校正后影像与机载LiDAR数据完全匹配。 图1 试验区航空影像 图2 试验区机载雷达数据 图3 试验区DEM晕渲图 图4 试验区DSM晕渲图 3.3铁路区域提取 本文采用面向对象的方法对影像进行分类,经过多次试错,最终确定分割尺度为50,形状和平滑参数的权重设置分别为0.1和0.5(图像分割结果如图5),这样既保证了铁轨的边界十分清晰,生成的多边形数目也不多。然后采用成员函数法,建立合适的分类规则,准确分类出铁路。针对铁路这样的线状地物在遥感影像上的特点,同时结合机载雷达点云数据,根据经验和试错总结,最终确定铁轨的分类规则: L/W≥10;Greenness≤0.32 (10) 通过分类,得到铁路区域(如图6),将铁轨掩模叠加到点云数据中,见图7。 图5 图像分割结果 图6 铁路区域分类结果 图7 铁路区域内的点云 图8 感兴趣的铁轨点云 3.4铁轨激光点云分类 本文根据提取的铁路区域信息、高程及特征数据,提出了一种基于融合数据的轨道信息分类提取方法。该方法首先需要建立轨道的特征属性,由于铁轨具有明确、一致的符合建设规范要求的特征属性,易于定义用于精确提取的约束条件。约束条件包括:(1)铁轨高于道床一定距离;(2)铁路所在区域坡度较小[13]。 图9 铁轨点云叠加影像图显示 分类是在铁路区域内,根据高于地面的某特定高程来实现的。首先在铁路区内确定铁路点云,在0.5m的搜索半径内与最低点计算高度差△z,即地面上物体的归一化高度。根据DEM计算坡度可用于后续轨道提取阈值条件的设置。位于铁路掩膜区内空间上的点,符合下列条件即为轨道: (1)△z>0.15 m且△z<0.4 m; (2)位于坡度小于15°的空间区域。 图8为分类出的铁轨点云,图9为铁轨点云与影像的叠加图。 3.5铁轨提取 3.5.1单条铁轨点云提取 由于点云数据密集,数据整体处理工作量很大,故本文首先从整个点云数据中提取出各条铁轨的点云数据。对整个点云数据的(x,y)平面坐标拟合一条曲线L1,该曲线位于四条铁轨的中间。重复这个步骤,将每条铁轨的点云数据单独存放。 3.5.2路轨线路曲线拟合 本文采用最小二乘算法在Matlab软件拟合铁轨曲线。首先对单条铁轨线路点云数据进行初次曲线拟合,将四条铁轨线分离成单独的铁轨线,并分别对每一条铁轨线拟合,得到四条空间曲线,然后以各点到曲线的距离及平均距离,求取中误差,采用二倍中误差作为阈值,剔除粗差点,最后进行二次曲线拟合,拟合出的各个单条铁轨线路的曲线方程为: (11) 拟合出的所有曲线方程叠加在遥感影像上,如图10所示。 图10 拟合得到的铁路轨道线 图11 点云分类精度评价图 通过人工手动分类铁轨点云来进行点云分类精度评价,如图11所示,红色的点为手动分类的铁轨点云,即铁轨上的点云,绿色的点为自动分类的不在铁轨上的点云,即噪声点,最后计算所得点云自动分类的准确率为91%。 本文结合高分辨率遥感影像和高密度机载雷达点云数据的优点,先对遥感影像进行面向对象的图像分析,得到铁轨掩膜,然后利用铁轨掩膜得到感兴趣的铁轨点云数据,用MATLAB软件对点云数据进行拟合,得到空间曲线。该方法实现了铁路轨道基线的自动探测,为铁路基础测绘和地理信息数据的快速更新提供了重要的理论依据、技术支撑和生产保障。 [1]黄远宏.应用全站仪与PDA掌上电脑实现既有铁路测量一体化系统原理探讨[J].铁道勘察,2007,33(1):21-23. [2]侯建民,黄远宏.基于全站仪的既有铁路测量技术系统探讨[J].铁道勘察, 2010,36(3):4-6. [3]刘金喜,张冠军.应用GPSRTK进行既有铁路里程丈量的精度分析[J].铁道勘察,2009,35(6):14-17. [4]胡拔香,李东斌.双转点法抄平技术在既有铁路测量中的应用[J].铁道勘察,2011,37(1):10-12. [5]韩改新.机载激光雷达(LIDAR)技术在铁路勘测设计中的应用探讨[J].铁道勘察,2008,34(3):1-4. [6]Rottensteiner F,Trinder J,Clode S,et al.Using the Dempster-Shafer method for the fusion of LIDAR data and multi-spectral images for building detection[J]. Information Fusion,2005,6(4):283-300. [7]杜凤兰,田庆久,夏学齐,等.面向对象的地物分类法分析与评价[J].遥感技术与应用,2004,19(1):20-23. [8]陈云浩,冯通,史培军,等.基于面向对象和规则的遥感影像分类研究[J].武汉大学学报(信息科学版),2006,31(4):316-320. [9]王铁军,任思思,徐明.基于eCognition的混合对象分类方法研究[J].测绘通报,2014(3):137-138. [10]彭海涛,柯长青.基于多层分割的面向对象遥感影像分类方法研究[J].遥感技术与应用,2010,25(1):149-154. [11]Axelsson P.DEM generation from laser scanner data using adaptive TIN models[C]// In International Archives of Photogrammetry & Remote Sensing,Vol Xxxiii,B.2000. [12]Hai-Yang Y U,Gang C,Xiao-San G E,et al.Object oriented land cover classification using ALS and GeoEye imagery over mining area[J].Transactions of Nonferrous Metals Society of China,2011,21(S3):733-737. [13]Beger R,Gedrange C,Hecht R,et al.Data fusion of extremely high resolution aerial imagery and LiDAR data for automated railroad centre line reconstruction[J].Isprs Journal of Photogrammetry & Remote Sensing,2011,66(6):S40-S51. On extraction of railway tracks based on Airborne LiDAR data LUO Ling1,YU Hai-yang1,2,NIU Feng-ming1,MA Hui-hui1 (1.Key Laboratory of Mine Spatial Information Technologies of National Administration of Surveying Mapping and Geoinformation of China,Henan Polytechnic University,Jiaozuo 454000,China;2.School of Surveying and Land Information Engineering,Henan Polytechnic University,Jiaozuo 454000,China) The railway tracks are the key elements in the positioning of the railway infrastructure.High-resolution remote sensing image has a wealth of feature information,and airborne laser scanning data is of high accuracy elevation information,so we can combine the two together effectively,which can be directly used to extract the fine railroad tracks.First,according to embankment spectrum and local terrain features of the railway,and based nDSM data obtained from airborne LiDAR data,the paper establishes an extraction algorithm based on object-oriented railway region;further eliminate interference factors by mathematical morphology,so get rail LiDAR point cloud data area;Lastly,the paper uses the least squares method to fit the point cloud data accurately and obtains the track information. railroad tracks;object-oriented;Airborne LiDAR;least squares fitting 2016-01-29 国家自然科学基金资助项目(U1304402);卫星测绘技术与应用国家测绘地理信息局重点实验室经费资助项目(KLAMTA-201405);河南省高校科技创新团队支持计划资助项目(14IRTSTHN026) 罗玲(1989—),女,河南南阳人,硕士研究生。 1674-7046(2016)04-0079-07 10.14140/j.cnki.hncjxb.2016.04.016 P237 A2 空间曲线拟合
3 数据处理




4 精度评定
5 结 论
猜你喜欢
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
英语文摘(2019年1期)2019-03-21
小学阅读指南·低年级版(2017年1期)2017-03-13
现代计算机(2016年12期)2016-02-28
遥感信息(2015年3期)2015-12-13
中国交通信息化(2015年6期)2015-06-06
太空探索(2014年4期)2014-07-19
中国舰船研究(2014年4期)2014-05-14
