
基于过程神经网络的六维力传感器动态解耦研究
2016-10-10 05:16许德章张家敏
重庆文理学院学报(社会科学版) 2016年5期
王 毓,许德章, 张家敏, 许 曙
(安徽工程大学机械与汽车工程学院, 安徽 芜湖 241000)
基于过程神经网络的六维力传感器动态解耦研究
王毓,许德章, 张家敏, 许曙
(安徽工程大学机械与汽车工程学院, 安徽芜湖241000)
六维力传感器动态解耦方法主要集中于不变性动态解耦方法和迭代解耦方法,其解耦效果取决于建模精度,强耦合情况下解耦误差大,工程实现复杂.文章针对这一问题提出一种基于过程神经网络动态解耦算法,将六维力传感器输入输出及网络权函数进行相同正交基展开,简化计算过程,求解六维力传感器输出输入耦合关系.实验结果表明,过程神经网络在六维力传感器动态解耦中应用效果良好,为动态解耦提供了一种新方法.
六维力传感器;动态解耦;过程神经网络;正交基展开
六维力传感器是工业机器人工作过程中的重要辅助部件,常用于机器人自动焊接、打磨等有力反馈的场合.工业智能化的快速发展对六维力传感器的精度要求越来越高,现有的六维力传感器大多采用弹性梁结构并且都是先制造后标定,其结构和制造工艺必然使六维力传感器存在维间耦合[1].针对这一问题,学者们从结构设计和解耦算法两方面着手研究,结构上先后提出了横梁、竖梁、复合梁、筒式和双E型膜等形式.解耦算法主要集中在静态解耦方面,例如基于线性标定和基于最小二乘线性拟合的解耦算法都是将六维力传感器看成线性系统.在动态解耦方面,文献[2]提出不变性动态解耦方法和迭代解耦方法,从本质上揭示了多维力传感器输入输出之间的动态耦合关系.由于以上两种方法都是在二阶数学模型下提出的,对于三阶或三阶以上的数学模型,建模精度要求高,计算量大,尤其在强耦合情况下,解耦误差大,工程实现复杂[2,3].针对目前六维力传感器动态解耦存在的问题以及六维力传感器的动态耦合特性,本文提出一种基于过程神经网络的六维力传感器解耦方法,过程神经网络的输入和权值都可以是连续函数,利用过程神经网络自动提取六维力传感器输入函数的曲线形态和幅值特征,为简化计算过程引入函数正交基,对输入函数和网络权函数进行同一组正交基展开,试图通过过程神经网络训练求出六维力传感器输入输出耦合关系,实现动态解耦[4].
1 基于过程神经网络的解耦原理
1.1过程神经网络
过程神经网络是在人工神经网络基础上提出的.它的输入输出都可以是时变过程或时变函数,可描述输出对于输入在时间轴上的累积效应或聚合结果.这种特性为解决泛函逼近和泛函寻优等问题提供了一种新的方法[5,6].
单个过程神经元由加权、聚合和激励3部分组成,其输入与输出之间的函数关系为:
Y=f((W(t)⊕X(t))⊗K(·)-θ)
(1)
其中,X(t)表示过程神经元输入函数,W(t)表示过程神经元权值函数,K(·)表示过程神经元聚合基函数,θ表示过程神经元输出阈值,f表示过程神经元激活函数,Y表示过程神经元输出函数,“⊕”表示某种空间聚合运算,“⊗”表示某种时间(过程)聚合运算.过程神经网络由若干个过程神经元组成,用来解决多输入多输出时变系统的系统辨识、过程控制及优化等.过程神经网络模型如图1所示.
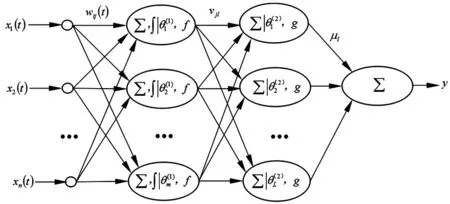
图1 过程神经网络模型

θj(1)]-θl(2)}
(2)
1.2基于正交基展开的学习算法
由于过程神经网络输出函数中含有对时间的积分运算,计算过程十分复杂.为了简化训练过程,在输入函数空间内引入一组标准正交基,将输入函数和网络权值函数表示为该组正交基的展开形式,将泛函数的寻优问题转化为权值函数基展开式系数和神经元激励阈值的寻优问题[8].
设b1(t),b2(t),…,bL(t)为输入函数空间内的一组标准正交基函数,将输入函数X=(x1(t),x2(t),…,xn(t))表示为该组基函数的有限项展开形式,ail为xi(t)展开式中相对于基函数bl(t)的系数[9-11],即
(3)
将权值函数wij(t)也用b1(t),b2(t),…,bL(t)的展开形式表示,记为
(4)
将(3)式、(4)式带入(2)式中,过程神经网络输出为:
(5)

2 基于过程神经网络的六维力传感器动态解耦
2.1六维力传感器动态输入输出数据获取
基于过程神经网络对六维力传感器进行动态解耦,首先要建立六维力传感器过程神经网络动态模型.六维力传感器的输出信号作为过程神经网络模型的输入信号,六维力传感器的加载力信号作为过程神经网络的输出信号.六维力传感器的输入输出信号由六维力传感器动态标定实验采集得到.图2为自行研制的六维力传感器动态标定实验台.
动态标定实验台采用电磁激振器加载方式,产生频率和幅值连续可控的谐波激励力.改变传感器安装位置,调整电磁激振器位置,从传感器不同方向(通道)加载,将压电陶瓷驱动器电压调整到10 V,频率为0~300 Hz的扫频信号分别加载到传感器的各个方向,每隔20 Hz采集传感器六路输出电压信号[12].
选取动态标定实验获取的96个六维力传感器动态输入输出数据作为网络训练样本,训练样本选择如表1至表6.
2.2实验仿真及结果分析
从表1至表6各方向输入输出数据可以看出,单个方向加载时其他5个方向确实存在着不同程度的耦合输出,且FX方向和FY方向加载时其他各方向耦合关系类似,MX方向与MY方向加载时其他各方向的耦合关系类似.这与六维力传感器弹性体的对称分布结构对应.下面利用基于勒让德正交多项式展开的过程神经网络对表1至表6的实验数据进行处理.
采用基于勒让德多项式展开学习算法对网络进行训练.参数设置如下[13,14]:过程神经元输入神经元节点数,输出神经元节点数,隐藏层神经元节点数L=9.误差精度为ε=0.05,正交基函数项为6,学习速度为0.05,惯性系数取0.25,最大迭代次数M=6 000.当网络训练1 764次时,达到设定的误差精度,网络收敛,最大误差为0.05.训练的误差曲线如图3所示.
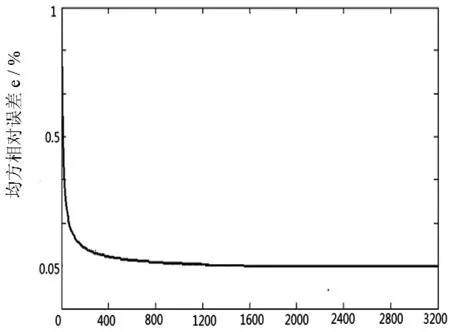
图3 网络误差训练图
网络训练后得到的输入层与隐藏层之间的连接权值、隐藏层与输出层之间的连接权值以及隐藏层的输出阈值如表7、表8和表9所示.
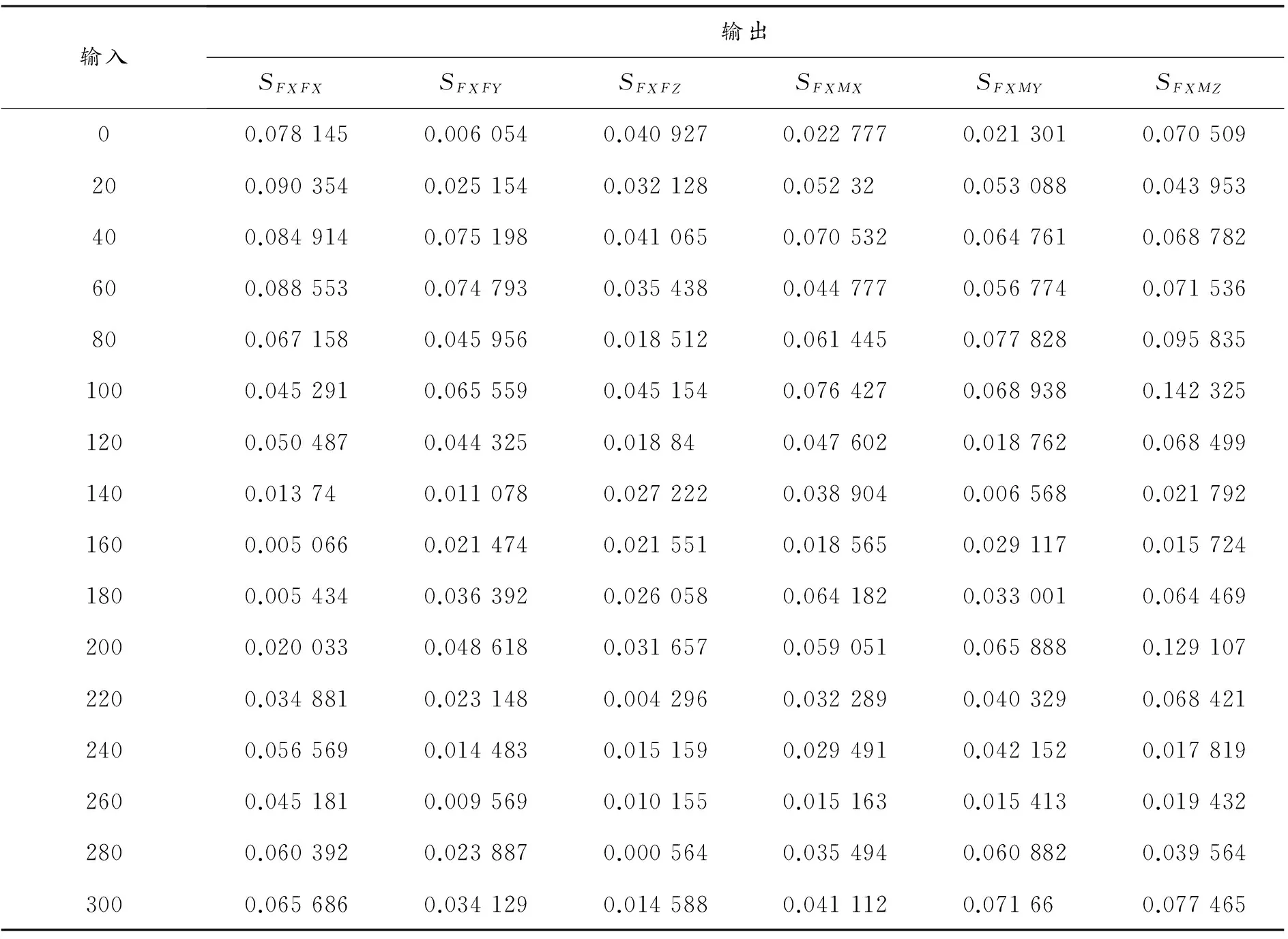
表1 FX方向(频率0~300 Hz)加载时其他方向的输出
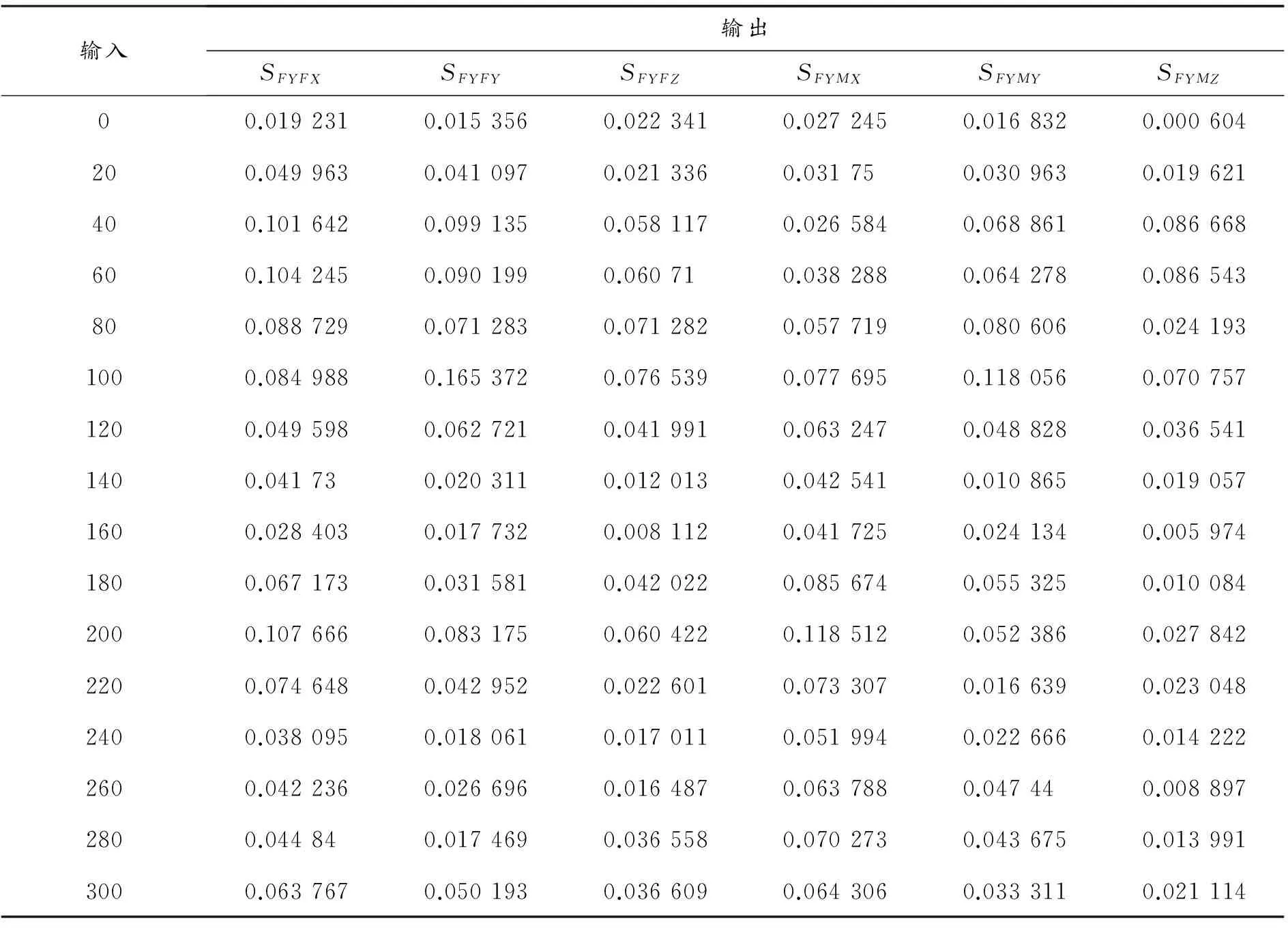
表2 FY方向(频率0~300 Hz)加载时其他方向的输出

表3 FZ方向(频率0~300 Hz)加载时其他方向的输出
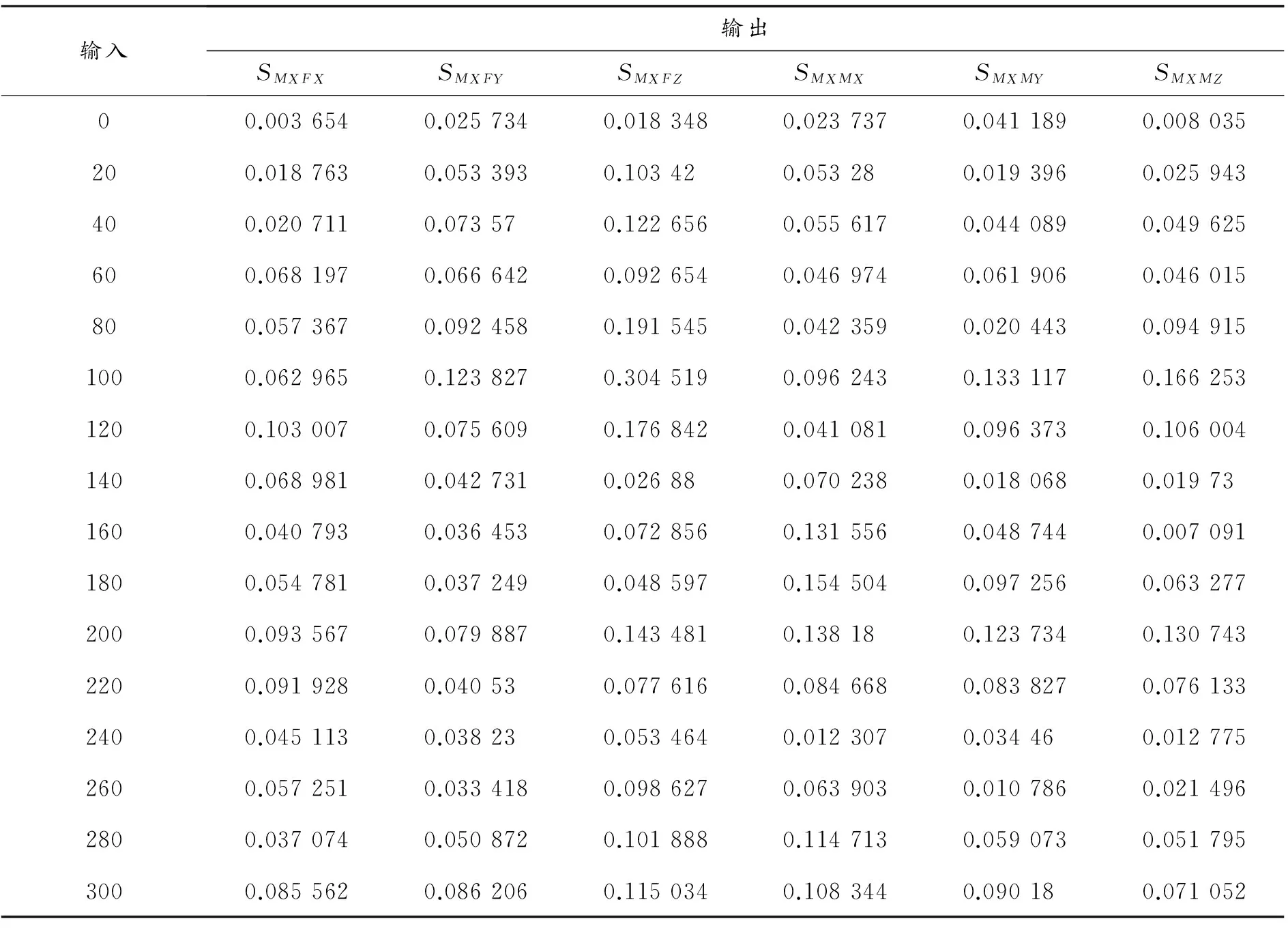
表4 MX方向(频率0~300 Hz)加载时其他方向的输出

表5 MY方向(频率0~300 Hz)加载时其他方向的输出

表6 MZ方向(频率0~300 Hz)加载时其他方向的输出
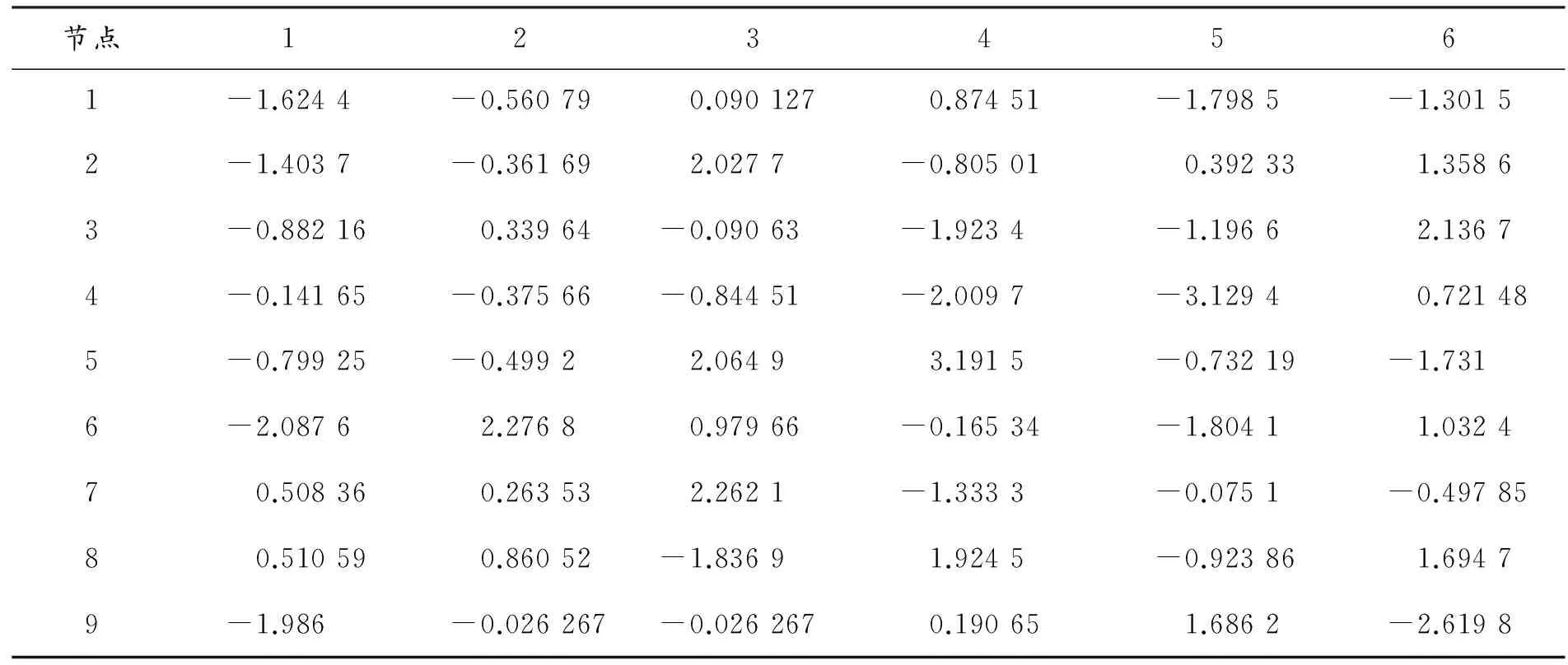
表7 输入层与隐藏层之间的连接权值

表8 隐藏层与输出层之间的连接权值

表9 隐藏层与输出层之间的阈值
3 结语
为解决六维力传感器动态解耦问题,利用过程神经网络对六维力传感器进行建模,通过六维力传感器动态标定实验台获取六维力传感器动态输入输出数据,通过过程神经网络对离散的输入输出数据进行非线性拟合,将六维力传感器的输出(输入)数据作为过程神经网络的输入(输出)数据,通过MATLAB神经网络工具箱对数据进行处理,设定误差值.当网络训练1 764次时,网络收敛.从图2可看出,网络训练效果良好,表7至表9为网络训练得到的输入层与输出层之间的连接关系,即为六维力传感器耦合关系,完成对六维力传感器动态输入输出的解耦.
[1]王国泰,易秀芳,王理丽.六维力传感器发展中的几个问题[J].机器人,1997,19(6):474-478.
[2]徐科军,殷铭,张颖.腕力传感器的一种动态解耦方法[J].应用科学学报,1999,17(1):39-44.
[3]徐科军,李成.多维力传感器迭代动态解耦方法[J].中国机械工程,1999,10(1):46-49.
[4]何新贵.过程神经网络[M].北京:科学出版社,2007.
[5]蔡月芹,朱景福,费丽君.基于权函数正交基展开的过程神经元网络学习算法[J].中国新技术新产品,2009(7):20-21.
[6]张强,许少华,富宇.基于过程神经网络的储层微观孔隙结构类型预测[J].化工自动化及仪表,2014,42(8):839-843.
[7]丁刚,徐敏强,侯立国.基于过程神经网络的航空发动机排气温度预测[J].航空动力学报,2009,24(5):1035-1039.
[8]邓韧,李著信,樊友洪.基于多种正交基函数的模块化过程神经元网络[J].计算机工程与应用,2005(30):69-73.
[9]许少华,刘扬,何新贵,等.基于过程神经网络的水淹层自动识别系统[J].石油学报,2004,25(4):54-57.
[10]孙智源.基于过程神经网络集成的航空发动机性能衰退预测[D].哈尔滨:哈尔滨工业大学,2010.
[11]周继.基于过程神经网络的动态系统模式识别方法研究[D].大庆:大庆石油学院,2008.
[12]董跃龙. 六维力传感器动态解耦方法的研究[D]. 芜湖:安徽工程大学,2015.
[13]陈明.MATLAB神经网络原理与实例精解[M].北京:清华大学出版社,2013.
[14]朱凯,王正林.精通MATLAB神经网络[M].北京:电子工业出版社,2010.
(责任编辑穆刚)
Research on dynamic decoupling of six-axis force sensor base on the procedure neural networks
WANG Yu , XU Dezhang, ZHANG Jiamin, XU Shu
(College of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu Anhui 241000, China)
The main dynamic decoupling method of six-axis force sensor focused on constance dynamic decoupling method and the iterative dynamic decoupling method. In the case of the strong coupling, decoupling will produce large errors and the project is complex. Aiming at the problem, this paper offers a dynamic decoupling algorithm for this problem based on process neural network, which expand the input and output functions of the six-axis force sensor and the connection weight functions of the network based on orthogonal function basis expanses and simplify calculation process. Also it is to solve the relationship of the six-axis force sensor and the input, output of coupling. Experimental results show that the process of application of neural network has good effect on the six-axis force sensor dynamic decoupling and provides a new method for the dynamic decoupling.
six-axis force sensor; dynamic decoupling; procedure neural networks; orthogonal basis expansion
2016-03-26
国家自然科学基金资助项目(51175001).
王毓(1990—),男,安徽舒城人,硕士研究生,主要从事机器人与信息感知方面的研究;许德章 (1964—), 男,安徽芜湖人,教授,博士,主要从事机器人感知及机器人机构与控制方面的研究.
TP212.12
A
1673-8004(2016)05-0034-07
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
现代装饰(2018年5期)2018-05-26
校园英语·中旬(2017年10期)2017-11-20
吉林省教育学院学报(2017年3期)2017-05-31
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
电源技术(2015年5期)2015-08-22
