
基于角度参数特定边界值的旋转交叉眼干扰容限研究
2016-10-13 17:11刘松杨董春曦朱颖童赵国庆
电子与信息学报 2016年4期
刘松杨 董春曦 朱颖童 赵国庆 许 锦
基于角度参数特定边界值的旋转交叉眼干扰容限研究
刘松杨 董春曦*朱颖童 赵国庆 许 锦
(西安电子科技大学电子信息攻防对抗与仿真技术教育部重点实验室 西安 710071)
在干扰平台旋转或者被不同方向的雷达探测情况下,该文对传统反向交叉眼和正交四点源反向交叉眼进行了容限分析。在分析过程中引入了角度参数的概念,同时提出角度参数特定边界值(AFSBV)作为评估两种方案性能的指标。进一步推导得出角度参数特定边界值关于相位偏移和幅度增益的闭合解,在干扰平台旋转角取值不断变化时,得出角度参数特定边界值的最大值。这一结论能指导交叉眼干扰工程实践中相位和幅度的取值范围,使系统能满足所有干扰平台旋转或者被不同方向的雷达探测情况。
电子战;角度欺骗;交叉眼干扰;反向阵;容限分析
1 引言
单脉冲跟踪雷达具有较强的抗干扰能力,且实现简便稳定。交叉眼干扰是针对单脉冲跟踪雷达系统的一种有效的角度欺骗干扰方法。交叉眼干扰通过模仿角闪烁现象,实现引导单脉冲跟踪雷达偏离真实目标而指向假目标的目的。
文献[6]提出通过线性拟合分析的方法,拟合形成和通道与差通道的方向图,得出雷达指示角。文献[7]基于当天线在与信号相位波前对齐时将接收来波信号的能量最大的现象,提出了一种相位波前(phase-front)的分析方法。文献[8]针对角闪烁提出了一种称为坡印亭矢量(Poynting-vector)的分析方法。后来,文献[9]提出了一种几何分析法来解决交叉眼干扰问题。同时,文献[10]将多点干扰加入到考虑中,并用最小均方最优化的方法来仿真实际情况。以上文献均是传统的交叉眼分析方法,没有将反向阵列加入到考虑中。
反向交叉眼干扰是交叉眼干扰的一种扩展,将干扰单元反向放置形成反向阵列[11]加入到考虑。文献[12-16]提出了一种运用几何分析方法,并将反向阵列加入到考虑中,对交叉眼进行分析,得出了较传统分析方法更为准确的分析结果,同时,国内的学者也有对反向交叉眼进行研究[17]。
目前关于反向交叉眼的分析均是建立在干扰平台旋转角为定值的假设上,在这个限制条件下,传统的交叉眼方案均只能工作在一定的角度范围内。由于干扰平台可能旋转、抖动或者被不同方向的雷达探测,一种新的反向交叉眼方案在文献[18]中提出,并通过数学推导和证明得出最佳方案正交四点源反向交叉眼。
文献[18]并没有对交叉眼干扰的容限进行分析,本文通过对文献中方案进行容限分析,提出参数“角度参数边界值”(AFSBV)来描述使单脉冲测角系统一直处于搜索状态下所需的参数设置,推导出满足条件的相位和幅度取值范围,同时得出了角度参数边界值(AFSBV)的闭合解。为了使单脉冲测角系统不处于测角锁死状态,角度参数边界值(AFSBV)在传统反向交叉眼方案与正交四点源反向交叉眼方案中均能作为性能指标,这一参数可以指导交叉眼工程实践中相位偏移和幅度增益的取值,同时通过对角度参数边界值(AFSBV)的分析能够进一步突显出正交四点源交叉眼方案的优越性。
2 数学分析
雷达指示角与雷达角在反向交叉眼干扰系统中的闭合解关系式已经在文献[12]和文献[18]中进行了推导,在文献[12]中分析的传统反向交叉眼干扰系统由两个干扰单元组成,如图1所示,只有干扰单元1,单元2同时工作。在文献[18]中分析的正交四点源反向交叉眼干扰系统由4个正交放置的干扰单元组成,且对信号没有调制处理的发射天线要在雷达中心与干扰单元中心连线同一侧,如图1所示,右侧所有干扰单元1,单元2,单元3,单元4同时工作。
如图1所示的反向交叉眼方案,左边为雷达系统,右边为反向交叉眼干扰单元。雷达中心与干扰单元中心的距离为,雷达系统两天线单元的距离为,交叉眼干扰单元1与单元2和干扰单元3与单元4之间的距离均为。雷达中心点与同一对干扰单元两点连线的夹角定义为张角,由于干扰单元与雷达间距离较远,近似认为半张角为雷达中心到其中任意一个干扰单元的连线与雷达中心到干扰单元中心的连线的夹角。其中干扰单元1,单元2的半张角为,干扰单元3,单元4的半张角为。雷达角定义为雷达指向与雷达中心点与干扰单元中心点连线的夹角,雷达指向与干扰单元1, 2的夹角分别为,同样地,与干扰单元3, 4的夹角分别为。干扰平台旋转角为。
存在设定角的情况下,当设定角有且只有一个值,此时所取的交叉眼增益系数定义为增益系数边界值。当交叉眼增益系数大于这个边界值时,则反向交叉眼干扰系统不存在设定角,同时也不存在角度参数,雷达一直处于搜索状态。增益系数边界值所对应的角度参数值即为角度参数边界值(AFSBV)。
正如文献[12]所描述,本文同样假设雷达对单个的干扰单元为远场,而对整个反向交叉眼系统来说不为远场[9]。
2.1 传统反向交叉眼容限分析
如图1所示,当干扰单元1和干扰单元2工作时,组成了传统的反向交叉眼方案。雷达指示角的表达式已经在文献[12]和文献[14]中推导出:
交叉眼增益系数在以下推导中得到广泛应用,由文献[12]给出为
雷达指示角有解,需要使式(2)的分母不为零,将式(3)和式(4)代入式(2)的分母可得
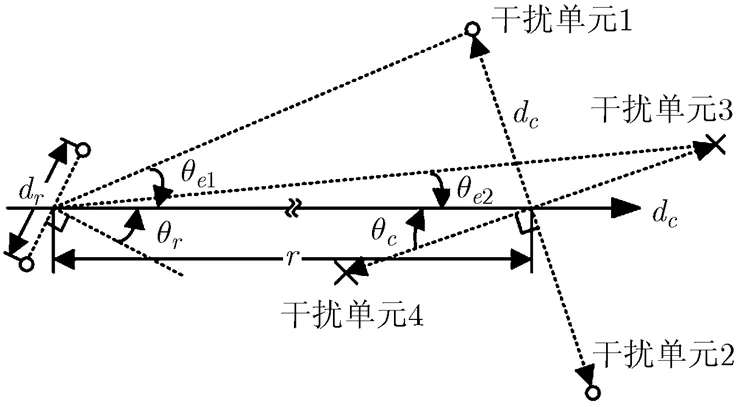
图 1 反向交叉眼干扰方案图
式(2)的分子永远不过零点,雷达指示角也永远不为零。这时需要交叉眼增益系数大于一个特定边界值即可,将在和通道主波束内的近似值和式(5)代入式(2)的分子即
在干扰平台旋转或者被不同方向的雷达探测情况下,角度参数边界值的最值点影响着雷达测角系统的状态,同时也指导着交叉眼干扰工程实践中相位和幅度的取值。在此方案中角度参数边界值的最值点在取值为和时取得。由式(13)可得,当取值无限趋近于时,分母趋近于0,此时角度参数边界值趋近于无穷大。
2.2 正交四点源反向交叉眼容限分析
如图1所示,如果所有干扰单元均同时工作,则组成了文献[18]中的正交四点源反向交叉眼方案。雷达指示角的表达式已经在文献[18]中推导得出为
雷达指示角有解,需要使式(14)的分母不为零,将式(3),式(4)和式(15)代入式(14)的分母可得
式(14)的分子永远不过零点,雷达指示角也永远不为零。这时需要交叉眼增益系数大于一个特定边界值即可,将和在和通道主波束内的近似值和式(5)、式(16)代入式(14)的分子可得
我们设定正交四点源反向交叉眼系统半张角为两对干扰单元半张角的均值,即为。
在干扰平台旋转或者被不同方向的雷达探测情况下,角度参数边界值的最值点影响着雷达测角系统的状态,同时也指导着交叉眼干扰工程实践中相位和幅度的取值。在此方案中角度参数边界值的最值点在取值为和时取得。当为时,仍然存在非无穷大的角度参数边界值。
2.3 两方案理论分析结果比较
对同一雷达测角系统,若想得到同一个角度参数值,在设定场景中进行比较,即只有平台旋转角不为定值。对于传统交叉眼方案,分析式(12),和共同起到作用,同时由式(5)可知,的取值范围为;对于正交四点源反向交叉眼方案,分析式(22),和共同起到作用,且式(22)与式(12)具有类似的结构,同时由式(5)和式(16)可知,的取值范围为。两方案中,设定角的取值范围,说明传统交叉眼方案中设定角随着干扰平台旋转角变化的范围较大,导致传统交叉眼方案中的增益系数变化范围也较大,使得与之对应的相位偏移和幅度增益取值变化大,干扰系统稳定性较差。
同时传统交叉眼方案在角度参数边界值的取值上存在无穷大的情况,此时没有与之对应的幅度增益和相位偏移使单脉冲测角系统处于搜索状态;相比之下,正交四点源反向交叉眼方案比传统方案在角度参数边界值取值上有更好的稳定性,尤其在干扰平台旋转角进行变化时,一直存在非无穷大的角度参数边界值,且有与之对应的幅度增益和相位偏移满足条件来使单脉冲测角系统处于搜索状态。这一结论更有利于分析干扰平台旋转角变化时,幅度增益和相位偏移的工程取值问题及交叉眼方案的选取问题。
3 结果和比较
本节对上面推导的关于两种反向交叉眼方案的容限进行实例分析,运用下面所列典型的针对船或者飞行器的导弹参数进行计算。
本节将通过绘制幅度增益和相位偏移关于角度参数的等高图,来比较两种反向交叉眼方案的容限性能。将本文提出的角度参数特定边界值,作为两种方案容限比较的主要性能指标。
3.1 传统反向交叉眼方案实例分析
在上述典型参数条件下,干扰平台的旋转角处于第1象限时,角度参数边界值在干扰平台旋转角取值为时取得最小值,在干扰平台旋转角取值临近时取得最大值,由于在干扰平台旋转角取值为时,角度参数为无穷大,故本节将干扰平台旋转角取值为89.9°时取得最大值。
根据式(3)~式(6),式(12)和式(13),其中图2和图3分别是传统反向交叉眼在干扰平台旋转角为和89.9°时的等高图,图4为传统反向交叉眼中角度参数特定边界值随干扰平台旋转角的变化关系图。同时将角度参数取值为6,7,8,10和12的等高线在图2和图3中绘出,并将角度参数特定边界值标注到等高图上以确定对应的幅度增益和相位偏移。
由图2可见角度参数特定边界值为19.1369,表明在此等高线圈内的幅度增益和相位偏移取值均可使雷达一直处于搜索的状态,而没有固定的设定角求得的角度参数值。而由图3 可知,没有显示角度参数特定边界值,根据运行结果可得此时的取值为11296,表明几乎没有满足条件的幅度增益和相位偏移使得雷达一直处于搜索的状态。同时,比较两图同一角度参数值同为6,7,8,10和12的等高线,尤其是较大的角度参数值,可以看出随着干扰平台旋转角变化,相位偏移和幅度增益的取值范围差别较大,系统稳定性较差。由图4可知,随着干扰平台旋转角的增大,角度参数特定边界值是不断增大的,在干扰平台旋转角为~增速较平缓,之后急剧增加,以致在时就已经超过100,显示了极大的不稳定性。
上述实例分析所得结论与2.1节的理论分析一致,且能表明在这种典型参数情况下,传统反向交叉眼方案在干扰平台旋转或者被不同方向的雷达探测情况下,没有对应的幅度增益和相位偏移使得单脉冲测角雷达稳定地处于搜索状态,雷达测角系统可能会锁死在一个固定角度值,不利于欺骗雷达测角系统。
3.2 正交四点源反向交叉眼方案实例分析
在上述典型参数条件下,干扰平台的旋转角处于第1象限时,角度参数边界值在干扰平台旋转角取值为0°时取得最大值,在干扰平台旋转角为45°时取得最小值。
我们根据式(3)~式(6),式(15),式(16),式(22)和式(23),其中图5和图6分别是正交四点源反向交叉眼在干扰平台旋转角为0°和45°时的等高图,图7为正交四点源反向交叉眼中角度参数特定边界值与干扰平台旋转角的变化关系图。同时将角度参数取值为6,7,8,10和12的等高线在图5和图6中绘出,并将角度参数特定边界值标注到等高图上以确定对应的幅度增益和相位偏移。
由图5可见角度参数特定边界值为38.2738,表明在此等高线圈内的幅度增益和相位偏移取值均可使雷达一直处于搜索的状态,且没有固定的设定角和其对应的角度参数值;由图6可见角度参数特定边界值为27.3039,表明在此等高线圈内的幅度增益和相位偏移取值亦均可使雷达一直处于搜索的状态,且没有固定的设定角,也没有和其对应的角度参数值。同时,比较两图同一角度参数值同为6,7,8,10和12的等高线,可以看出随着干扰平台旋转角变化,相位偏移和幅度增益的取值范围几乎没有差别,说明系统稳定性很好。由图7可知,随着干扰平台旋转角的变化,角度参数特定边界值是在27.3039~38.2738范围内缓慢变化的,在干扰平台旋转角变化范围内,显示了极为优秀的稳定性。
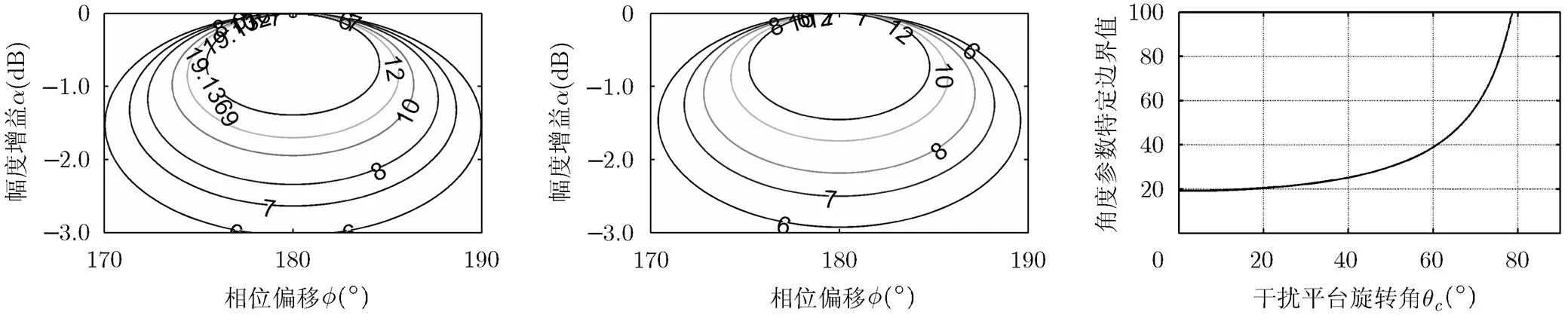
图 2 传统反向交叉眼在干扰 图 3 传统反向交叉眼在干扰平 图 4 传统反向交叉眼中角度参数特定边

图 5 正交四点源反向交叉眼在干 图 6 正交四点源反向交叉眼在干 图 7 正交四点源反向交叉眼中角度参数特
上述实例分析所得结论与2.2节的理论分析一致,且能表明在这种典型参数情况下,传统反向交叉眼方案在干扰平台旋转或者被不同方向的雷达探测情况下,一直有对应的幅度增益和相位偏移使得单脉冲测角雷达稳定地处于搜索状态。且在角度参数特定边界值取得最大值38.2738时,等高线圈内的幅度增益和相位偏移取值适用于所有干扰平台旋转或者被不同方向的雷达探测情况。
3.3 两方案实例分析结果比较
通过上述两种方案的实例分析,当干扰平台旋转或者被不同方向的雷达探测情况下,传统交叉眼方案角度参数等高线变化较大,相位偏移和幅度增益的取值范围变化也较大;而正交四点源反向交叉眼系统角度参数等高线几乎没有变化,相位偏移和幅度增益的取值范围稳定,系统稳定性很好。
在角度参数特定边界值方面,传统的反向交叉眼干扰方案在干扰平台旋转角较大时,角度参数特定边界值趋于较大值,而能使单脉冲雷达一直处于搜索状态的相位偏移和幅度增益取值范围基本不存在。正交四点源反向交叉眼干扰方案在所有干扰平台旋转角情况下,角度参数特定边界值趋于一个最大值,存在相位偏移和幅度增益取值能使单脉冲雷达一直处于搜索状态。
4 结束语
通过对传统反向交叉眼和正交四点源反向交叉眼进行数学分析和比较,能够得出在干扰平台旋转或者被不同雷达指向时,正交四点源反向交叉眼干扰方案一定存在对应的相位偏移和幅度增益能够使单脉冲测角雷达一直处于搜索状态。
同时得出了角度参数特定边界值(AFSBV)关于相位偏移和幅度增益的闭合解公式。为了使单脉冲测角雷达一直处于搜索状态,根据此闭合解公式能够指导正交四点源反向交叉眼干扰方案中相位偏移和幅度增益的取值。
[1] 赵国庆. 雷达对抗原理[M]. 西安: 西安电子科技大学出版社, 1999: 169-183.
ZHAO Guoqing. Fundamentals of Radar Countermeasure[M]. Xi’an: Xidian University Press, 1999: 169-183.
[2] 唐琳, 焦淑红, 齐欢, 等. 一种单脉冲雷达多通道L1正则化波束锐化方法[J]. 电子与信息学报, 2014, 36(9): 2201-2206. doi: 10.3724/SP.J.1146.2013.01742.
TANG Lin, JIAO Shuhong, Qi Huan,. A new mono-pulse radar beam sharpening method with multichannel L1 regularization[J].&, 2014, 36(9): 2201-2206. doi: 10. 3724/SP.J.1146. 2013.01742.
[3] 李永祯, 胡万秋, 陈思伟, 等. 有源转发式干扰的全极化单脉冲雷达抑制方法研究[J]. 电子与信息学报, 2015, 37(2): 276-282. doi: 10.11999/JEIT140146.
LI Yongzhen, HU Wanqiu, CHEN Siwei,. Active repeater jamming suppression using polarimetric monopulse radar[J].&, 2015, 37(2): 276-282. doi: 10.11999/JEIT140146.
[4] 殷红成, 王超, 黄培康. 雷达目标角闪烁三种表示的内在联系[J]. 雷达学报, 2014, 3(2): 119-128.
YIN Hongcheng, WANG Chao, and HUANG Peikang. Inherent relations among the three representations of radar target angular glint[J]., 2014, 3(2): 119-128.
[5] 苏剑, 宋志勇, 付强, 等. 单脉冲雷达不可分辨目标与诱饵联合跟踪方法[J]. 雷达学报, 2015, 4(2): 160-171.
SU Jian, SONG Zhiyong, FU Qiang,. Joint tracking method for the unresolved decoy and target with monopulse radar[J]., 2015, 4(2): 160-171.
[6] SHERMAN S M. Complex indicated angles applied to unresolved radar targets and multipath[J]., 1971, 7(1): 160-170.
[7] HOWARD D D. Radar target angular scintillation in tracking and guidance systems based on echo signal phase front distortion[C]. Proceedings of NEC, 1959, 15: 840-849.
[8] DUNN H J and HOWARD D D. Radar target amplitude, angle, and doppler scintillation from analysis of the echo signal propagating in space[J]., 1968, 9(9): 715-728.
[9] LARS F. Cross-eye jamming of monopulse radar[C]. International Waveform Diversity and Design Conference, Pisa, Italy, 2007: 209-213.
[10] HARWOOD N M, Dawber N W, King J D,. Multiple-element crosseye[J].,&, 2007, 1(1): 67-73.
[11] SHARP E D and DIAB M. Van atta reflector array[J]., 1960, 8(4): 436-438.
[12] DUPLESSIS W P, ODENDAAL J W, and JOUBERT J. Extended analysis of retrodirective cross-eye jamming[J]., 2009, 57(9): 2803-2806.
[13] DUPLESSIS W P. A comprehensive investigation of retrodirective cross-eye jamming[D]. [Ph.D. dissertation]. University of Pretoria, 2010.
[14] DUPLESSIS W P, ODENDAAL J W, and JOUBERT J. Tolerance analysis of cross-eye jamming systems[J]., 2011, 47(1): 740-745.
[15] DUPLESSIS W P, ODENDAAL J W, and JOUBERT J. Platform skin return and retrodirective cross-eye jamming[J]., 2012, 48(1): 490-501.
[16] DUPLESSIS W P. Limiting apparent target position in skin-return influenced cross-eye jamming[J]., 2013, 49(3): 2097-2101.
[17] LIU Tianpeng, WEI Xizhang, and LI Lei. Multiple-element retrodirective cross-eye jamming against amplitude- comparison monopulse radar[C]. 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, 2014: 2135-2140.
[18] LIU Songyang, DONG Chunxi, XU Jin,. Analysis of rotating cross-eye jamming[J]., 2015, 14: 939-942.
刘松杨: 男,1987年生,博士生,研究方向为雷达对抗、雷达干扰和雷达指纹识别.
董春曦: 男,1971年生,副教授,硕士生导师,主要研究方向为电子对抗技术和电子战系统仿真.
朱颖童: 男,1988年生,博士生,研究方向为无源定位跟踪和电子侦察信号处理.
赵国庆: 男,1953年生,教授,博士生导师,主要研究方向为电子对抗系统设计和电子战信号处理.
许 锦: 女,1987年生,博士生,研究方向为射频隐身.
Foundation Items: Fundamental Research Funds for Central Universities (K5051202026, JB140203), The National 973 Program of China (613181)
Tolerance Analysis of Rotating Cross-eye Jamming Based on Angle Factor Specific Boundary Value
LIU Songyang DONG Chunxi ZHU Yingtong ZHAO Guoqing XU Jin
(Key Laboratory of Electronic Information Countermeasure and Simulation Technology, Xidian University, Xi’an 710071, China)
In the case that the jammer platform rotates or is pointed in all different directions for radar detcting, the tolerance analysis is made between the conventional retrodirective cross-eye and the orthogonal four jamming elements. In the analysis procedure, angle factor is introduced. A new criterion called Angle Factor Specific Boundary Value (AFSBV) is proposed to evaluate the performance of the two scenarios. The closed-form solutions for the phase shift and amplitude gain are derived in the following sections. In the case of rotating jammer platform, the maximum value of angle factor specific boundary value is obtained. The results for the amplitude and phase can satisfy the case that the jammer platform rotates or is pointed in all directions for radar detecting.
Electronic warfare; Angular deception; Cross-eye jamming; Retrodirective arrays; Tolerance analysis
TN972
A
1009-5896(2016)04-0906-07
10.11999/JEIT150903
2015-07-30;改回日期:2015-12-11;网络出版:2016-02-19
董春曦 chxdong@mail.xidian.edu.cn
中央高校基本科研业务费专项资金(K5051202026, JB140203),国家973计划项目(613181)
猜你喜欢
股市动态分析(2021年25期)2021-12-30
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
初中生世界·八年级(2019年6期)2019-08-13
电子制作(2018年19期)2018-11-14
宇航计测技术(2018年3期)2018-09-08
制造业自动化(2017年2期)2017-03-20
电子制作(2016年1期)2016-11-07
小学生导刊(低年级)(2016年9期)2016-10-13
小学生导刊(低年级)(2016年6期)2016-07-02
