基于TSVD的广义逆波束形成对扩展性噪声源的识别*
2016-10-13 05:39叶虹敏袁昌明范昕炜谷小红
传感技术学报 2016年4期
叶虹敏,王 强*,袁昌明,范昕炜,谷小红
(1.中国计量大学质量与安全工程学院,杭州310018;2.中国计量大学机电工程学院,杭州310018)
基于TSVD的广义逆波束形成对扩展性噪声源的识别*
叶虹敏1,王强1*,袁昌明1,范昕炜1,谷小红2
(1.中国计量大学质量与安全工程学院,杭州310018;2.中国计量大学机电工程学院,杭州310018)
广义逆波束形成是一种高效的声源识别方法,但是直接求解广义逆所得到重构声源极易受到测量误差的影响,重构声源位置将偏离实际。为提高声源识别精度,采用正则化方法控制测量误差,结合奇异值截断滤波正则化和广义逆理论提出一种基于TSVD的广义逆波束形成算法,并建立了数值仿真模型,以单极子点源和扩展性组合声源为研究对象,对比常规波束形成、GIB算法、TSVD-GIB算法详细分析了声源类型与频率等因素对声源识别性能的影响。最后在半消声室内对音箱进行了声源识别验证,结果表明基于TSVD-GIB算法具有较好的稳健性,能有效降低旁瓣干扰,相比GIB算法能更精准的识别声源。
声源识别;广义逆波束形成;截断奇异值分解;迭代
EEACC:7230doi:10.3969/j.issn.1004-1699.2016.04.011
传感器阵列测量技术是一种非常有效的噪声源识别、定位及声场可视化技术,可以为机电产品的噪声控制、低噪声设计提供依据。将波束形成方法引入到传感器阵列信号处理中,增强声源入射方向上的信号,成为一种有效的声源识别技术,可在中远距离测量,能够识别中高频率的声源[1-2],甚至实现快速移动声源的精确定位[3],对于汽车、列车、飞机这样运动中的大结构声辐射体尤其有用[4-6]。波束形成技术通过对阵列传声器接收的声压信号进行加权、延时、求和等运算,输出结果具有空间指向性,表明声源的位置,而不是直接得到声源自身的声辐射信息,有效地解决了波束形成过程中声功率的计算问题[7-8]。但是,常规的波束形成其空间分辨率受基阵孔径的限制,为了达到一定的分辨率,需要较多的阵元数目,但这样无疑会增加测量设备的成本和测量工作的难度,同时受“瑞利准则”限制,很难分辨相距较近的两个声源,因此,在不增加测量设备的条件下探索新的波束形成声源识别算法是非常具有有意义的。
近年来,由Takao等提出的广义逆波束形成[9]GIB (Generalized Inverse Beamforming)算法通过较少的迭代求逆过程有效地降低旁瓣级、提高声源识别分辨率,从而受到了广泛地应用。实际测量时,由于测量环境中存在噪声干扰,使实际测量声压的幅值和相位都会存在一定的误差,直接采用采集数据进行声源识别,会使识别效果产生偏差,因此,在用广义逆求解过程中需要引进正则化方法控制测量误差对重构解的影响。
在广义逆波束形成求解过程中,Takao等人引入了L1范数正则化方法[10],能体现声源信号的稀疏特征,但单独引入L1范数正则项时声源识别结果易受到干扰噪声影响,从而无法保证声源识别结果的稳定性。徐中明等引入了光滑-L0范数[11],相比L1广义逆波束形成,在相同的空间分辨率情况下,该方法需要的阵列传感器更少,而且具有更好的空间分辨率,但实际应用中声源识别精度相对较低。对于病态问题解算的直接正则化方法本质是一致的,但在降低奇异值项对方程解的影响程度上存在着差异[12],奇异值截断滤波正则化 TSVD(Truncated Singular Value Decomposition)是完全消除了小奇异值项对解的影响,因此,求得的正则化解精度相对较高。
为进一步提高广义逆波束形成性能,充分结合正则化方法的优势,本文提出一种基于迭代奇异值截断滤波正则化的广义逆波束形成算法。为验证该算法在声源识别中的有效性和实用性,文中建立了数值仿真模型,以单极子点源和扩展性组合声源为研究对象,系统比较了常规波束形成、GIB算法、TSVD-GIB算法中声源类型与频率对声源识别性能的影响。最后采用音箱模拟单极子和扩展性相干声源,在半消声室内结合GIB算法、TSVD-GIB算法进行了声源识别验证。
1 基于TSVD的广义逆波束形成
1.1噪声分布与模态向量
基于传感器阵列测量的波束形成技术,根据各个传感器的位置差及其接收声压信号的时间差获取高度方向性波束特征,进而识别声源。声源识别示意图1所示。
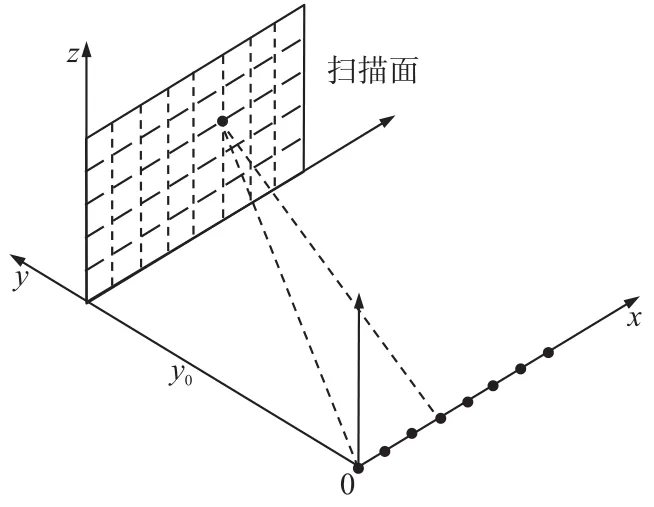
图1 声源识别模型
如图1所示,声阵列中第m个传感器记录的声压信号Qm(t)是接收时间的函数,测量数据组成m维声压向量Q:

广义逆波束形成GIB(Generalize Inverse Beamforming)是基于广义逆的波束形成算法,对传声器接收到的时域信号Qm(t)进行傅里叶变化转化为频域信号P,构建互谱矩阵R。

式中<·>表示均值,互谱矩阵R是基于阵列测量的波束形成展开的,常规波束形成直接对接受的信号进行延迟求和处理,麦克风产生的通道自噪声等干扰信号体现在互矩阵R的对角元素上,通过对互谱矩阵R的奇异值分解,可分离出噪声和信号,将互谱矩阵R进行奇异值分解:

式中,矩阵U由互谱矩阵R的特征向量组成U=[u1,u2,…,um] ,Λ是由R的特征值组成的对角矩阵Λ=diag[λ1,λ2,…,λm] ,互谱矩阵R中包含了声阵列测量数据的声源信号和噪声信号,通过特征向量和特征值能够重构声源分布情况,定义一个与声源相关的模态向量:

类似于其他波束形成算法,得可到声源分布与模态向量之间的关系式[12]:

在声源面上设定目标领域,用本征模式描述目标域内每个网格点上阵元接收的声压信号,式中ai代表了目标域内的声源向量,传递函数矩阵H为m×n矩阵(m为阵元个数,n 为声源数目)。
1.2截断奇异值和迭代
GIB算法是基于广义逆的波束形成算法,传递矩阵H为奇异矩阵不能直接求解,GIB算法运用广义逆求解式(5),可得到源向量的最小二乘解:目标域内的网格点数为N,当m>N(超定)时,ai=[HHH]-1HHvi;当 m<N(欠定)时,ai=HH[HHH]-1vi。
实际测量时,干扰噪声一般远弱于有用信号,因此,传递矩阵H一般为病态矩阵,直接求解广义逆所得到重构声源极易受到测量误差的影响,若没有采取任何误差处理措施,重构声源位置将偏离实际,对病态问题求解采用TSVD方法求解。
将式(5)中传递矩阵H进行奇异值分解和广义逆变换:
式中,Σ=diag(σ1,σ2,…,σN),奇异值处于分母地位,过于小的奇异值在运算中实际起到了误差放大作用,因此实际计算时采用截断奇异值分解或者加阻尼因子求解。
TSVD方法是通过设定一个阈值,直接将n个奇异值小于阈值的设置为零,用以去除奇异值中干扰噪声的扰动影响,截断后的奇异值对角矩阵Σ=diag(σ1,σ2,…,σN-n,0,…,0),截断点的选取至关重要,过大极易造成过正则化(高稳定性的低精度算法),过小起不到滤波作用,理想的截断点应使模态向量能精准地重建声源面信息,一般建议,将截断点ε取为传递矩阵最大特征值的0.1%~10%。由于TSVD方法在反演的过程中并没有限制解的非负性,因此在得到初始解之后需要通过迭代的方式完成非负限制[13]。在进行奇异值分解并得截断之后,进行迭代修正,每次迭代,引入衰减系数 β,以 βk·N·m产生新的网格点数(0<β<1,k为迭代次数),重新构造传递函数矩阵H′,产生新的源向量ai′。
2 仿真分析
本文将广义逆波束形成算法运用于噪声源定位中,对比分析常规波束形成算法、GIB算法、TSVD-GIB算法对单极子、扩展性声源的定位精度。GIB算法对声源定位效果对初始化时选择的随机点位置及个数有很大的依赖,为了减少计算声源位置所耗费的时间,仿真中,在声源平面上取大小为2 m×2 m,场点数目为67×67,相邻场点间隔3 cm的矩形网格场点区域,在该区域中假定噪声源。实际信号采集过程中需要考虑到背景干扰噪声及采集通道的电噪声等,因此取信噪比SNR=10 dB。
仿真条件为:声音在空气中的传播速度为c= 340 m/s,传声器阵列为4×4矩形声阵列,阵列面与声源面距离为1 m,阵元间距取d=λ/2,即d=5.7 cm,信噪比 SNR=10 dB,取ε为 1%,迭代衰减系数β=0.9,为便于进行对比分析,将测量得到的声学成像结果都进行归一化处理。
在1 000 Hz和2 000 Hz声源频率下,进行基于常规波束形成算法、GIB算法、TSVD-GIB三种算法的单极子声源仿真,声源位置为(0.3 m,0.4 m),数值仿真得到的声源成像结果如图2所示。
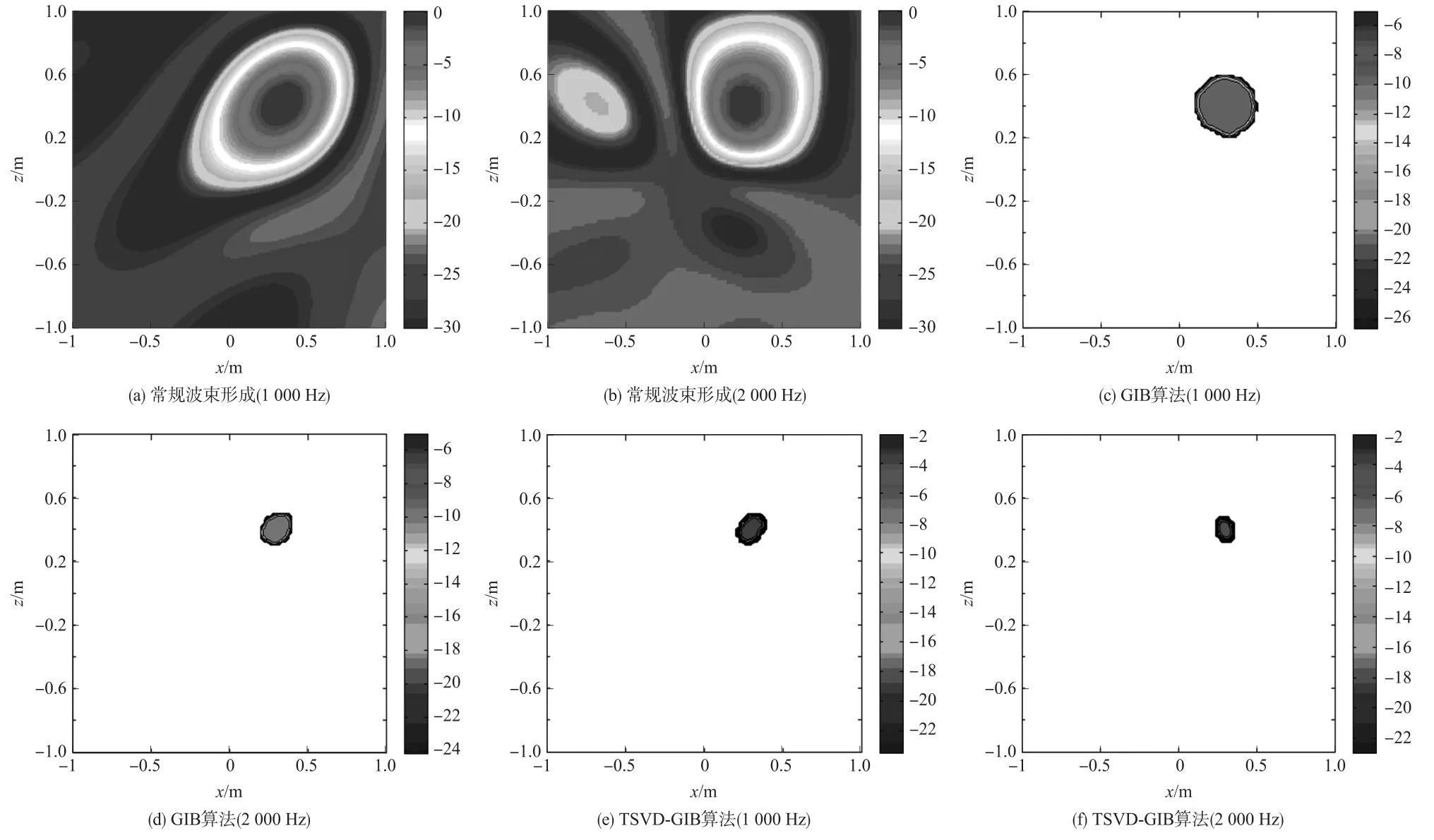
图2 单极子声源仿真结果
图2为声源辐射频率分别为1 000 Hz,2 000 Hz时声源平面声源成像结果。3种不同的波束形成算法均在坐标为(0.3 m,0.4 m)处出现了声学中心,且频率越高,声学中心越小,声源识别越准确,这主要是由于波束形成的“高频好分辨率”特性。相对于常规波束形成算法,GIB算法,TSVD-GIB算法是通过广义逆求解反复迭代求解线性方程组,能有效消除旁瓣干扰,因此具有更高的声源分辨率。对比GIB算法,TSVD-GIB算法,后者的声学中心位置明显小于前者,表明基于迭代的TSVD-GIB算法具有更小的主瓣宽度,该算法提高了声源识别的分辨率。
进一步进行扩展性组合声源识别仿真实验。假设声源面内5个具有相等强度、辐射特定频率声波的单极子源排列在同一直线上,声源实际位置为(-0.2 m,-0.2 m),(-0.1 m,-0.1 m),(0 m,0 m),(0.1 m,0.1 m),(0.2 m,0.2 m),仿真结果如图3所示。

图3 扩展性声源仿真结果
图3显示了3种算法在声源辐射频率为2 000 Hz时对扩展性声源的识别效果。如图3所示常规波束形成算法已失效,GIB算法能辨别出声源的大概位置,但不能准确分辨出间距较小的5个声源,这两种算法的旁瓣级较大,干扰了声源的有效识别。TSVD-GIB算法能识别出4个声源的有效位置: (-0.2m,-0.19m)、(-0.08m,-0.08m)、(0.12m,0.1m)、(0.21 m,0.2 m),且声学中心位置较前两种算法小,说明基于迭代的TSVD-GIB算法在准确识别声源位置的基础上,同时能有效消除旁瓣干扰、提高声源识别分辨率。
3 实验验证
数值仿真结果表明迭代TSVD广义逆波束形成的声源识别方法能有效消除旁瓣、有效辨识出扩展性声源、提高声源识别的精确度。为进一步验证该方法的可行性及实用性,设计了基于波束形成声源识别的实验算例验证。
实验在半消声室内完成,由于实验所在半消声室的地面吸声小于0.01,因而在实验分析过程中近似将反射界面视为刚性界面,该半消音室有效测试空间为:3.6 m×3.6 m×3.0 m。实验声源为HY-760音箱,外观尺寸为0.1 m×0.13 m×0.2 m,如图4(a)所示为音箱结构尺寸图,其中音箱声源中心与音箱上表面的距离为0.12 m,音箱左右两边对称分布,双音箱布置位置如图4(b)所示。实验装置分布如图5所示,音箱声信号由实时的声波生成器软件sinegen产生,并由爱华AWA5870B型功率放大器进行功率放大;测量采集装置为北京东方振动和噪声技术研究所的16通道数据采集仪器、ICP声压传声器(外径为12.7 mm)进行信号示波采样,矩阵列尺寸为0.6 m×0.48 m。
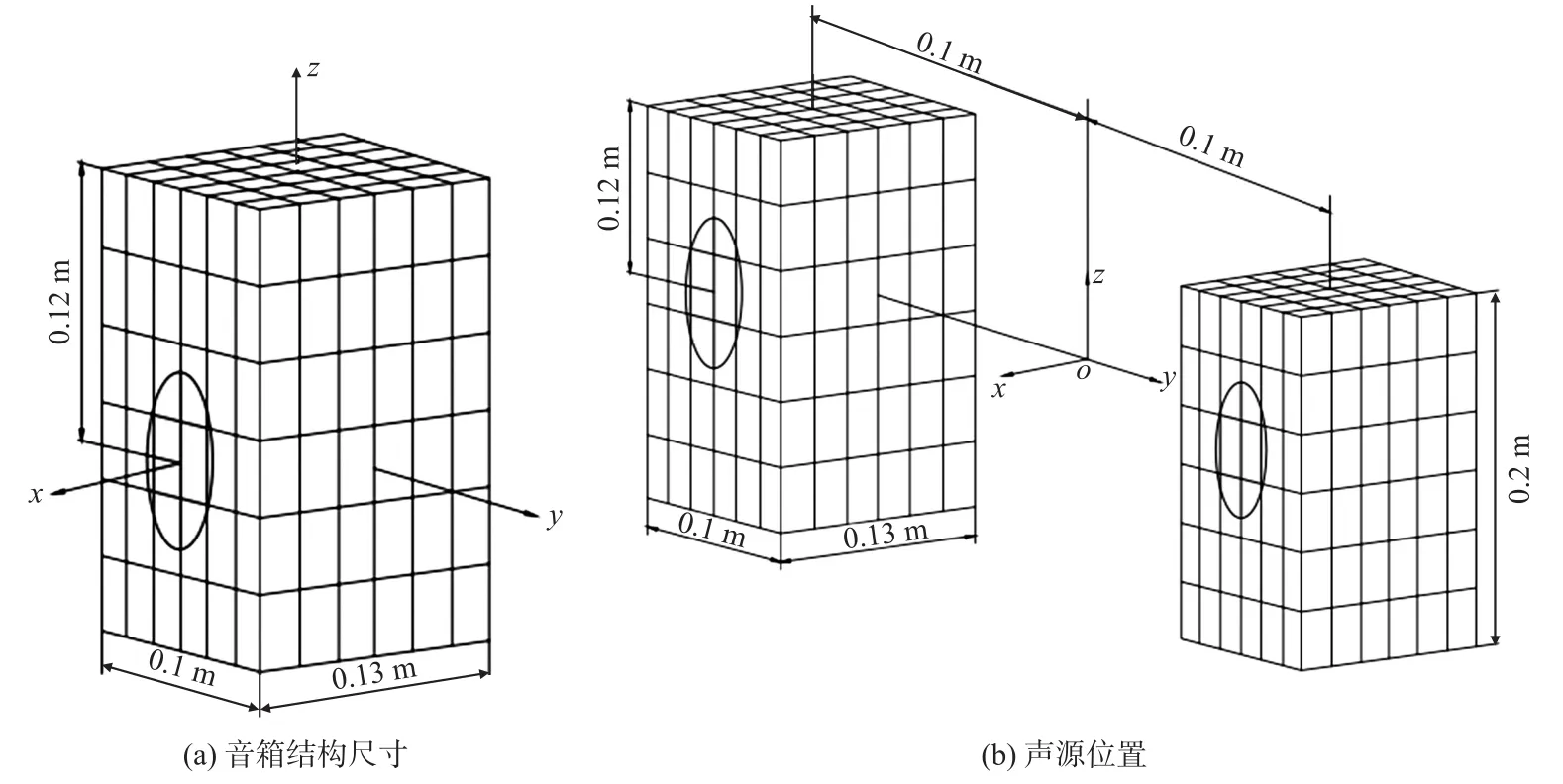
图4 实验声源
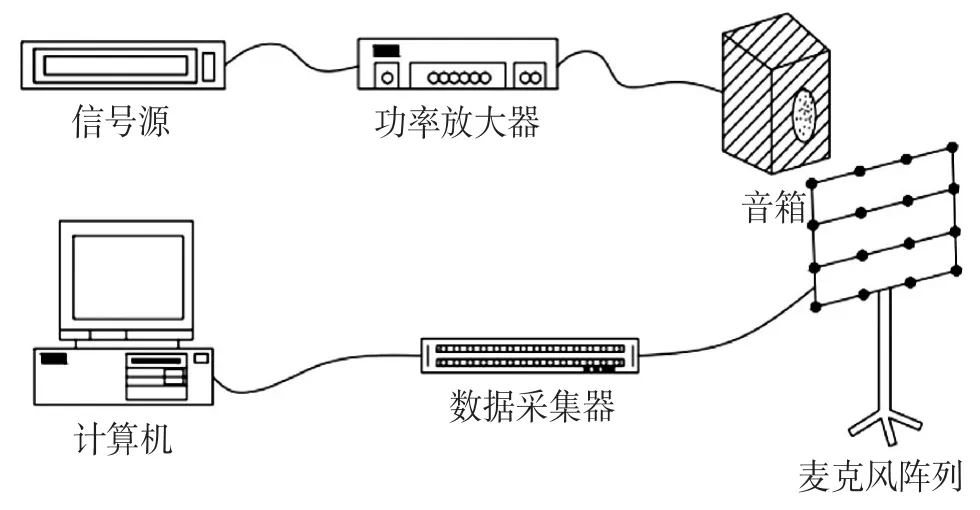
图5 实验装置布置图
实验中选取的测量参数如下:音箱声源中心距离地面高度为1.32 m,利用受稳态信号激励的音箱模拟单极子和扩展性组合声源,在声源面处模拟2 m×2 m大小的声源计算平面,并将其离散成间距为0.03 m×0.03 m的网格点,在距离声源平面1 m处布置4×4的16通道矩形麦克风阵列,阵列原点距离地面高度为1.2 m。
利用以上实验设备进行数据采集后,运用工程版DASP-V10软件将实测实验数据导出,利用Matlab软件结合 GIB、TSVD-GIB算法实现声源识别。
图6为中心频率为2000 Hz下GIB算法和TSVD-GIB算法对单极子声源的识别效果图,单音箱的实际声源位置为(0.23 m,0.12 m)。如图6所示,GIB算法和TSVD-GIB算法对于简单的单极子点声源,均能实现声源识别,但是基于TSVD-GIB算法的声学中心更小,声源识别效果更精准。基于GIB算法识别的声源位置为(0.19 m,0.14 m),基于TSVD-GIB算法识别的声源位置为(0.21 m,0.09 m),两种波束形成算法均在x,y轴上出现了一定的偏移,这是由于信号采集系统中传感器通道之间的相位不匹配造成了延时误差,为减小误差,后期工作中可采用传递函数法对相位误差进行补偿。
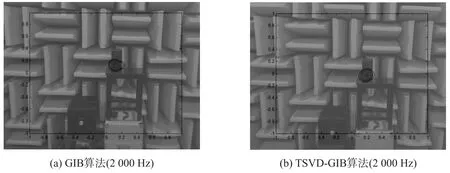
图6 单极子声源识别效果
图7为中心频率为2 000 Hz下GIB算法和TSVD-GIB算法对2个相干组合声源的识别效果图,双音箱的实际声源位置为(0.03 m,0.12 m)、(0.23 m,0.12 m)。基于GIB算法识别的声源位置为(0 m,0.14 m)、(0.19 m,0.22 m),基于TSVD-GIB算法识别的声源位置为(0 m,0.17 m)、(0.19 m,0.11 m)。对比2种算法的声源识别效果,GIB算法识别出的右侧声源中心明显偏离实际,这是由于GIB算法直接采用广义逆求解,所识别的声源易受到测量误差的影响,是GIB算法的稳健性不高所致,而TSVD-GIB算法进行了正则化处理,声源识别效果偏离位置较小,位于声源周围的声压曲线图更密集,有效地降低了主瓣的宽度,提高了声源识别的空间分辨率。
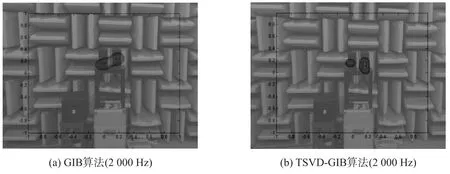
图7 扩展性声源识别效果
4 结论
在广义逆波束形成的基础上,充分结合正则化方法的优势,提出了一种基于奇异值截断滤波正则化的广义逆波束方法,在保证声源识别结果的稳健性基础上体现了较高的空间分辨率。
基于数值仿真模型,以单极子声源和5个点源组合的扩展性声源为研究对象进行了仿真分析,结果表明,相比于常规波束形成、传统的广义逆波束形成,基于奇异值截断滤波正则化的广义逆波束方法不仅能准确识别声源位置,而且由于正则化的引入,进一步降低了旁瓣干扰,从而提高了声源识别的空间分辨率。
最后通过实验验证,采用音箱模拟单极子和扩展性相干声源,实验结果表明基于奇异值截断滤波正则化的广义逆波束方法能有效地提高声源识别的空间分辨率,从而验证了该算法的准确性。
[1] 张金圈,毕传兴,陈心昭.Beamforming方法的阵列研究及其在噪声源识别中的应用[J].噪声与振动控制,2009,29(3):54-58. Zhang Jinquan,Bi Chuanxing,Chen Xinzhao,et al.Study on Array Pattern and Its Application in Noise Source Identification Using Beamforming Method[J].Noise and Vibration Control,2009,29(3):54-58.
[2] 丁浩,李春晓,金江明,等.可识别声源深度的三维声聚焦波束形成方法[J].传感技术学报,2013,26(2):175-181. DING hao,LI Chun-xiao,JING Jiang-ming et al.Sound Source Depth Identifiable Three-Dimensional Focused Beamforming[J]. Chinese Journal of Sensors and Actutors,2013,26(2):175-181.
[3] 钱正莲,杨亦春,余立志,等.传声器阵列对高频弱声源的声成像识别方法[J].声学学报,2015,40(1):91-96. Qian Zhenglian,Yang Yichun,Yu Lizhi et al.Identification and Location of Acoustic Imaging on High Frequency Weak Noise Sources with a Microphone Arry[J].Acta Acustica,2015,40(1):91-96.
[4] 杨殿阁,李兵,王子腾,等.运动声源识别的动态波叠加方法研究[J].物理学报,2012,61(5):1-10. Yang Diange,Li Bing,Wang Ziteng,et al.Dynamic Wave Superposition Method for Moving Sound Sources[J].Acta Physica Sinica,2012,61(5):1-10.
[5] Talotte C,Gautier P E,Thompson D J,et al.Identification,Modeling and Reduction Potential of Railway Noise Sources:A Critical Survey[J].Journal of Sound and Vibration,2003,267(3):447-468.
[6] 乔渭阳,Michel U I F.二维传声器阵列测量技术及其飞机近场着陆过程噪声的实验研究[J].声学学报,2001,26(2):162-168. Qiao Weiyang,Michel U I F.A Study on Landing Aircraft Noise Based on the Fly-Over Measurements with a Planar Microphone Array[J].Acta Acustica,2001,26(2):162-168.
[7] 褚志刚,杨洋.基于波束形成缩放声强的声源局部声功率计算[J].声学学报,2013,38(3):266-271. Chu Zhigang,Yang Yang.Calculation of the Partial Area Sound Power Based on the Scaled Beamforming Sound Intensity[J].Acta Acustica,2013,38(3):266-271.
[8] 褚志刚,杨洋,蒋忠翰.波束形成传声器阵列性能研究[J].传感技术学报,2011,24(5):665-670. Chu Zhigang,Yang Yang,Jiang Zhonghan.Study on the beamforming performance of microphones arry[J].Chinese Journal of Sensors and Actutors.2011,24(5):665-670.
[9] Suzuki T K.Generalized Inverse Beam-Forming Algorithm Resolving Coherent/Incoherent,Distributed and Multipole Sources[C]// 14th AIAA/CEAS Aeroacoustics Conference.American Institute of Aeronautics and Astronautics:2008,AIAA-2008-2954.
[10]Suzuki T K.L1 Generalized Inverse Beam-Forming Algorithm Resolving Coherent/Incoherent,Distributed and Multipole Sources [J].Journal of Sound and Vibration,2011,330:5835-5851.
[11]徐中明,黎术,贺岩松,等.光滑L0范数广义逆波束形成[J].仪器仪表学报,2014,35(6):1277-1280. Xu Zhongming,Li Shu,He Yansong,et al.Smoothed Lo Norm Generalized Inverse Beamforming[J].Chinese Journal of Scientific Instrument,2014,35(6):1277-1280.
[12]范千,方绪华,范娟.病态问题结算的直接正则化方法比较[J].贵州大学学报(自然科学版),2011,28(4):30-32. Fan Qian,Fang Xuhua,Fan Juan,et al.Comparison of Direct Regularization Methods of Ill-Conditioned Problems Solution[J]. Journal of GuiZhou University(Natural Science Edition),2011,28(4):30-32.
[13]周小龙,聂生东,王远军,等.基于迭代TSVD的NMR二维谱反演算法[J].波谱学杂志,2013,30(4):542-550. Zhou Xiaolong,Nie Shengdong,Wang Yuanjun,et al.An Iterative Truncated Singular Value Decomposition(TSVD)-Based Inversion Methods for 2D NMR[J].Chinese Journal of Magnetic Resonance,2013,38(3):542-550.

叶虹敏(1990-),女,浙江省临安人,汉族,硕士研究生,研究方向为阵列信号处理;

王强(1976-),男,湖北应城人,博士,教授,主要从事结构健康检测方面的研究,qiangwang@cjlu.edu。
Research Extended Acoustic Sources Identification Based on TSVD Generalized Inverse Beamforming*
YE Hongmin1,WANG Qiang1*,YUAN Changming1,FAN Xinwei1,GU Xiaohong2
(1.College of Quality and Safety Engineering,China Jiliang University,Hangzhou 3100318,China;2.College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou 3100318,China)
Generalized inverse beamforming(GIB)is a kind of high effective and widely used sound source identification method.However,directly identify the sound source via generalized inverse technology will be seriously affected by measurement error,so the reconstruction of the sound source location will deviate from the ture position.To improve the performance of sound source identification,a new algorithm based on generalized inverse theory and truncated singular value decomposition(TSVD)was proposed,which is called TSVD-GIB can control the measurement error.Through numerical simulations on single source,extended sources,a comparison between the conventional beamforming,GIB algorithm,TSVD-GIB algorithm is carried to check their qualities of sound source identification affected by factors such as source type and frequency.Finally,the experiment on speakers is implemented in Semi-anechoic chamber to verify the sound source identification,and the result shows that the TSVD-GIB algorithm owns better robustness,which can effectively reduce the side lobe interference and more accurately compared with GIB algorithm.
sound source identification;generalized inverse beamforming;truncated singular value decomposition;iteration
TB52
A
1004-1699(2016)04-0525-06
项目来源:国家自然科学基金项目(51275498);质检公益性行业科研专项目(201410027)
2015-11-04修改日期:2016-01-08
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
怀化学院学报(2021年5期)2021-12-01
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
电子制作(2019年23期)2019-02-23
数学年刊A辑(中文版)(2019年1期)2019-01-31
新课程(中学)(2018年4期)2018-02-27
噪声与振动控制(2016年5期)2016-11-09
学周刊(2016年26期)2016-09-08
电脑爱好者(2016年8期)2016-04-28