物流搬运AGV的总体方案设计
2016-10-14 23:48王冠男刘伟
科学与财富 2016年28期
王冠男+刘伟
摘 要:本文从自动物流AGV搬运车要实现的功能目标出发,对AGV的控制系统进行研究,建立物流搬运AGV的整体结构。在AGV的混合式体系结构基础上,依据设计选择了控制系统中的硬件。
关键词:物流搬运;AGV
1.AGV的驱动形式
(1)单驱动形式
这种车的结构多用于三轮车体结构:一个驱动轮同时也是转向轮,两个从动轮固定(位于在车体轴线的两侧)起支撑和转向作用。
(2)差速驱动形式
差速形式的车体也有三个轮子和四个轮子的车型,两个固定驱动轮分别分布在车体轴线的两侧,一个或两个从动轮起转向和支撑作用。小车转弯依靠两个主动的驱动轮之间的速度差来实现。
(3)双驱动形式
这种驱动形式多见于四轮车型:两个驱动轮同时也是转向轮,两个从动轮起支撑和转向。这种结构形式的车型可以实现整车的前进、后退、全方位转向行驶。
(4)多轮驱动
这种类型的驱动形式多用于八轮车型,四个驱动轮同时也是转向轮,四个从动轮起支撑和转向作用,这种类型的小车可以实现整体的前进,后退和全方向行驶,较多用于重载行业。
2 驱动电动机的选择
2.1 电动机类型
电动机按工作电源分类:可分为直流电动机和交流电动机,其中交流电动机还分为单相电动机和三相电动机。AGV需要运动灵活,转向自由,工作范围大,适应性强,所以一般采用蓄电池供电,因此多采用直流电动机。基于我们设计的AGV的工作需求,也采用蓄电池供电,因此选用直流电动机。
2.2 驱动单元设计
本文设计的AGV的车体由两个驱动轮和两个万向轮支承,驱动轮由直流伺服电动机带动直角行星减速器驱动。驱动电动机不但是AGV行驶的动力来源,同时又通过其左右轮的差速实现AGV的转向。为了保证车能正常载重运行,同时能够完成各项动作,需要计算电机的驱动扭矩,根据电机特性等,最终确定小车的驱动电机的大小与减速器减速比。
3 控制系统方案设计
3.1 混合式系统结构模型
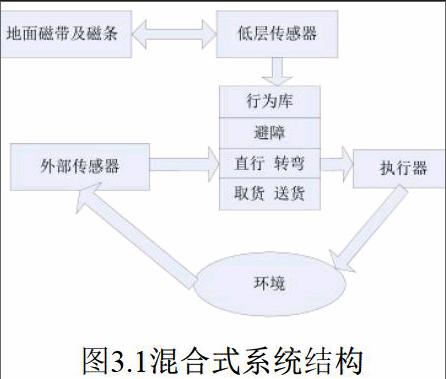
AGV自动车采用混合式体系结构、模块化的设计;低层传感器实时采集外面环境信息,为高层规划提供所需要的必要信息,高层规划层则为低层的行为提供必要的指导,混合式体系结构框图如图3.1所示。
行为库:包括停车、直线行走、转弯、取货、送货、避障、跟踪等基本动作,它主要接受两个层面的指令,一方面是同层的传感器信息,另一方面是来自执行层的命令。根据两者优先级的高低,在上层命令的指导下,选择相应的行为或者行为组合,并输出命令驱动执行器。
3.2控制系统硬件解决方案
控制器采用PLC作为整个小车的控制中枢,负责接收外部传感器信号、开关信号并发出指令,由PLC统一协调小车的行走、定位停车、紧急避障和搬运平台的上下货物。
(1)控制器的选择
AGV控制系统是AGV的直接中枢,它将小车的驱动转向、采集到的传感器的信号处理、电机伺服驱动器的控制、AGV小车的导引与定位、以及无线通讯等多种功能整合到一起,因此选择合理的控制器决定着AGV小车的运行稳定可靠。和单片机相比,PLC工作可靠,可靠性和抗干扰能力强,系统的设计、安装、调试工作量都小,本文所设计的AGV只控制两个电机的运动,选择PLC还是比较合适。
(2)激光安全区域扫描
激光安全保护装置是一种新型区域扫描传感器,其主要特点是:保护区域范围广泛,而且可以设置扫描区域数量,扫描角度大,与传统的超声波和光电传感器相比,克服了直线扫描的缺点。这种传感器广泛应用于自动导航小车、出入站口、自动化生产线、机器人的安全装置、自动立体化化车库、加工中心等多个地方。本AGV选定激光安全保护传感器。它的外形紧凑,安装方便,可以通过软件进行设置。该传感器分为二级安全监测,他的监测区域分为减速区和停止区两部分。当人和物进入减速区时,AGV小车会按照预先设置速度减速运行;当障碍物进入停止区时,AGV小车会即刻停车。因此,具有在AGV小车运行前方0~5m内的障碍物探测功能,具体的减速区和停止区监测区域范围及形状可根据实际要求,在软件客户端可以灵活地进行变更。通常减速区为2米,停止区为1米。传感器还可设置不同的监测区域,可根据具体的运行路线进行改变。
(3)伺服控制系统的选择
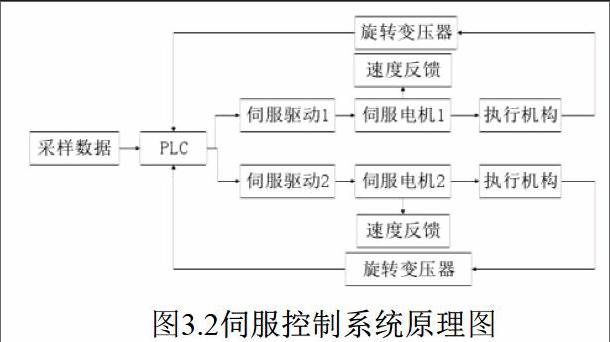
本课题设计的AGV伺服控制系统,采用直流无刷伺服电机调速方案,整个伺服系统原理图如3.2所示:
整个系统的工作过程是:磁传感器检测小车偏离磁带的位置,将采样数据送给PLC控制器,PLC根据采样值判断小车偏离磁带的情况,然后内部计算发出指令给伺服驱动器,驱动器驱动相应的伺服电机转动,通过速度差调整小车位置,直到小车运行到正确的位置上。伺服电机通常有三种控制模式:位置控制、速度控制、转矩控制。
位置控制模式是通过控制给电机输入脉冲的频率来确定控制电机速度,控制脉冲个数控制电机转动角度,通过脉冲方向控制电机的正反转,基于位置控制模式对速度和位置的准确控制,一般多应用于精准的定位设备。
转矩控制方式是通过控制给伺服电机输入模拟量或直接地址赋值来设定电机轴输出转矩的大小。速度模式通过模拟量的输入来控制伺服电机转动速度,速度控制有两种方式:一是通过伺服驱动器内部参数设定可以选择多段速度运行,二是选择连续速度控制模式,实现无级调速。
(4)镍镉快充电池
选用镍镉快充电池具有以下的优点:
a.电池充放电循环可靠性高;
b.电池内阻低;
c.电池充电时间短;
d.维护使用方便;
e.电化学性能稳定;
镍镉快充蓄电池完全满足AGV对电池的高循环能力、高性能、易于维护等方面的要求。快充蓄电池特别适合于间歇式的快充模式,采用比铅酸电池大10倍的电流进行充电,如电池的容量消耗每次限制在10%-15%之间时,蓄电池循环充放电约12000次后,电池的实际容量逐步下降到75%,但仍可正常循环使用约4000次。
结论
控制系统是AGV的核心,是AGV自动化、智能化的大脑,在小车的运动中起着举足轻重的作用,本文依据驱动形式选取控制系统中的硬件部分,包括:控制器,安全区域扫描,直流电源等AGV关键硬件。
参考文献
[1] 俞竹青 金卫东.机电一体化系统设计[M].电子工业出版社[M].2011(8) :P100-120.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
快乐语文(2020年36期)2021-01-14
微特电机(2020年11期)2020-12-30
科学大众(2020年17期)2020-10-27
中国新技术新产品(2020年4期)2020-05-05
文苑(2018年22期)2018-11-19
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
通信电源技术(2018年3期)2018-06-26