无人机电力巡检技术
2016-10-18 05:35陶承志,黄禹铭,李宇程等
中国科技信息 2016年18期
无人机电力巡检技术

概述
输电线路分布的特点就是点多面广,很多的工作点和覆盖面组成了庞大的供电网络。还有一个很显著的特点就是所处的环境多样,为了保障足够的电力供应,很多的复杂地形和恶劣的自然环境下也都分布着供电网络。电力输电线路和电线杆塔在这样恶劣的环境下,机械性能肯定会逐渐的降低,所以输电线路的巡检就变得非常的重要。因为及时的巡检可以及时的发现输电线路存在的问题,这样就可以避免大的问题发生。我们可以得出结论,输电线路的巡检是必须的,但是输电线路的具体巡检工作却没有那么的容易。我们最传统的巡检办法是人工巡检,这样的巡检就是让工作人员去按照输电线路的走向去实际的走一遍,这样的缺点是工作人员必须面对恶劣的自然环境,很多的高山和大河都也都需要去实际的跨越,这样就大大增加了工作人员工作的难度,所花的成本也就大大的增加了。
以中国各地供电局送电工区目前人员构成及所辖电线路情况进行分析。每个地级送电工区运行人员100多人,一般会负责该地区运行线路100多条几千公里,其中平原区线路、丘陵区线路和山区线路基本各占三分之一,人工巡线人员少,任务重,目前的情况是人员严重不足,加之所辖山区等走径差的线路较多,日常检修、消缺、防外破等其他工作影响,线路巡视完成率始终无法得到保证。
电力无人机是一种新型的电力巡检设备,电力无人机是一个经过开发的系统,自身具备无线遥控和固定程度导航等多个功能。电力无人机作为一种新兴的技术,具有很多的优势。他的远距离操作功能可以让工作人员的工作环境大大的改善,工作人员可以不必去一些环境恶劣的地方巡检,而且更重要的一个方面是,电力无人机的巡检更加的仔细,很多的微小环节,可以操作电力无人机去近距离的观察,这样就可以避免人为光学观察的时候差生的视觉误差或者光学设备的影响造成的巡检失误等弊端。
全谱段的实时遥测遥感系统
可见光成像原理设备
可见光摄像机的主要工作是在白天工作的,把模式设置为搜索状态,把摄像机的工作状态调节为短焦距状态,这是光学摄像机的一个基本的工作状态,再这样的工作状态下,可见光摄像机会具有很大的大的观测视场,这样的工作状态下视角会非常的宽阔。但是损失就是视频画面的分辨率是非常低的。当发现有异常情况的时候,需要详细分析可疑目标时,马上对电力无人机上的摄像机进行工作状态的变换,视角会大大的缩小,局部的画面会变得非常的清晰,这样就可以对发现的异常情况有一个准确的观察和判断了。其主要性能指标如下所示:
有效像素:1628(H)×1236(V)
帧率:30fps;
视场:小视场:0.8°×0.6°;大视场:2.86°×2.15°;
靶面尺寸:7.16mm×5.44mm
像素尺寸:4.40µm×4.40µm
接口:Camera Link 规格(PlCL)
红外热成像仪
红外巡检的方法和步骤:首先把输电线路全程的温度数据采集出来,并用表格的形式表现出来。这样做以后很容易就发现局部发热的问题了,一般发热的地方都是出现问题的地方。实施其他判断方法,对异常作最终确认肯定,对异常部位进行分解检测。其性能参数如表1所示。
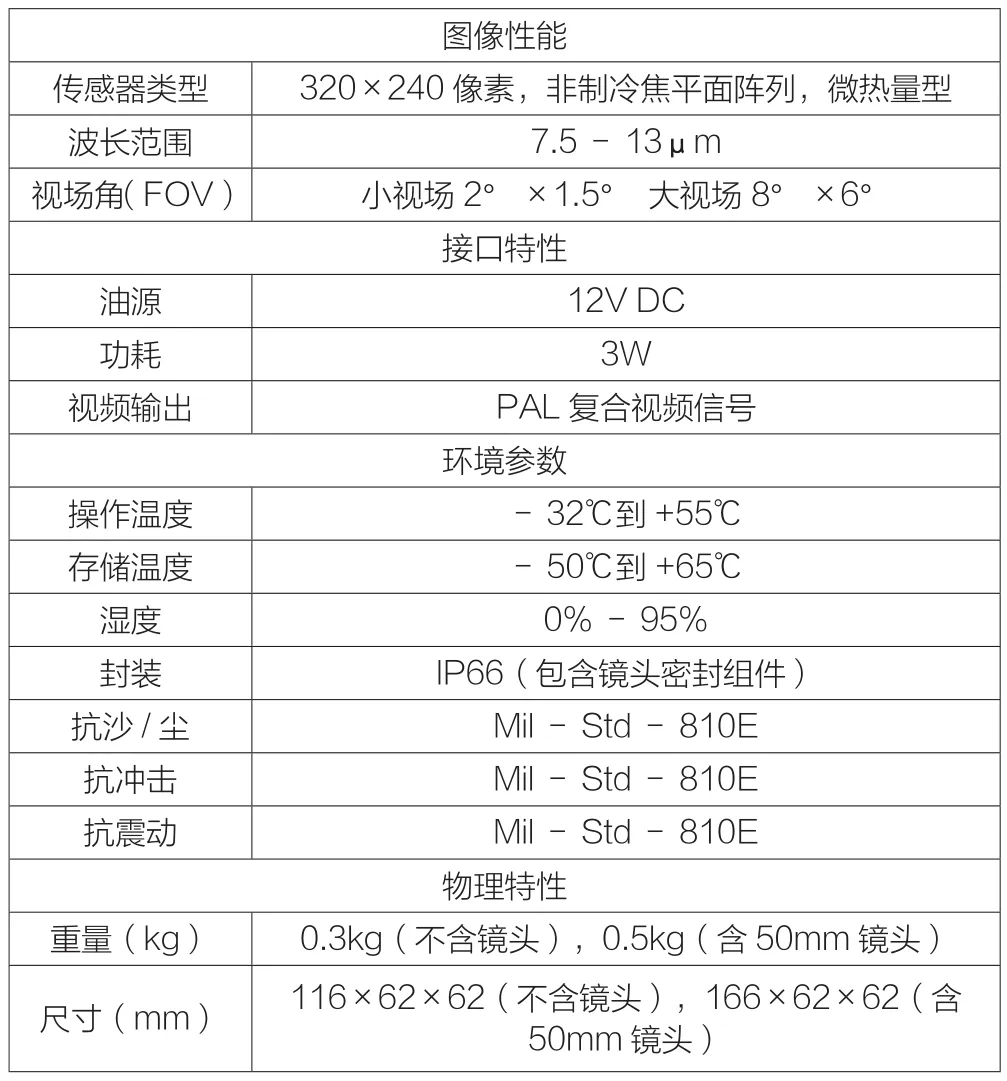
表1 红外热成像仪性能参数
高分辨率航空数码相机
高分辨率航空数码相机是获得高清晰输电网线影像的主要遥感设备,按不同的需求,可以获得彩色/全色、立体(三维)/二维的地面影像。
紫外成像仪器
电网有的时候是存在放电的现象的,但是不同的地方因为环境的不同,放电的强度也存在很大的差别,根据放电强度的不同,我们分为电晕,电弧和闪络这几种情况。我们应该有这样的一个物理常识,在放电的过程中会有紫外线产生,紫外线成像技术也就是根据这个原理才探测故障的,以为正常的线路室不会产生紫外线的,一旦无人机捕捉到了紫外线,我们就可以很快地找到放电的具体位置,这样也就大大的降低了电力巡检的难度。
紫外线成像仪可以不受白天太阳光的干扰,这点也具有非常重要的作用的,有了紫外线成像设备以后,我们就有了更加便捷和快速发现故障的设备了。
紫外成像仪的特点:
不受白天太阳光的干扰,可以在比较亮的环境下操作无人机进行电力巡检,这样可以降低无人机操作的难度。
重量很小,这样的好处是可以有很好的续航能力,野外作业的时候携带也是非常的方便。
外形设计足够的小巧,单手操作更加的方便。
有两种途径进行视频的输出,一个是PC卡储存图像,另一个是备有视频输出接口 ,这样的好处是既可以实时传输,也可以就地保存,方便以后的观看和学习研究。
陀螺稳定吊仓
陀螺稳定吊舱是电力无人机必不可少的一个组成部分,它可实现的功能如下:
通过稳瞄转塔实现惯性稳定,保持无人机在机动飞行、机体振动和其它干扰情况下稳定巡查、跟踪等功能;
光电吊舱光机系统为方位、俯仰两轴结构,红外热像仪和可见光相机采用模块化,针对不同应用时,可自由更换;
光电吊舱机载操控系统接收计算机发出的操作指令后,可以执行包括手动搜索、自动跟踪,红外热像仪与可见光CCD摄像机的操作控制指令,伺服系统的关停,以及无线传输等在内的控制指令;
伺服控制系统接收地面站无线传输的开机命令后,自动完成系统的加油、自检和开机(或关机),根据控制命令实时地对目标进行手动搜索和自动跟踪,把目标图像信息实时地传送给地面站监视器;
具有运行安全保障系统和报警装置,包括断油位置锁定和故障诊断。
陀螺稳定吊舱的主要技术指标如下:
1.回转精度 ± 0.05 °;
2.稳定性能:50 μrad;
3.重量:≤20Kg;
4.尺寸:300×500mm;
5.转动角度:n×360°;
6.最大转动速度:60°/sec;
7.最大转动加速度: 60°/sec2;
8.工作温度:-15 ℃ ~ +55 ℃ ;
9.湿度:0 ~ 95%;
10.功率:60W
11.输入油压:18 ~ 36V DC
12.方位精度:≤ 0.1mrad;
13.俯仰精度:≤ 0.1mrad。
总结
本文首先进行了电力巡检工作的概述,电力巡线工作确实存在很大的难度,需要作出相应的技术改进。然后,我们又详细的介绍了无人机系统中全谱段的实时遥测遥感系统。无人机巡线系统依靠其强大的功能,必将发挥越来越重要的作用。希望笔者的一些数据可以为读者提供帮助。
10.3969/j.issn.1001- 8972.2016.18.005
猜你喜欢
现代电子技术(2022年18期)2022-09-17
保健医苑(2022年6期)2022-07-08
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
科学技术创新(2021年25期)2021-09-11
动漫星空(兴趣百科)(2020年11期)2020-11-09
时代英语·高一(2019年1期)2019-03-13
中国医疗设备(2019年1期)2019-01-15
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
新闻前哨(2015年2期)2015-03-11