温度控制系统的设计与研究
2016-10-21 20:58朱文立张华山王衍桥吴帝
科学与财富 2016年9期
朱文立 张华山 王衍桥 吴帝
摘要:本系统使用了MC9S12XS128作为接收信号、处理信号、输出信号的核心,由4*4键盘作为设定温度的输入工具,12864作为显示工具,以及LM35作为测温元件;采用PID算法下的PWM波对水泥电阻和风扇进行控制,调节加热或降温的速度和幅度,实现了在设定温度误差1%的摄氏度下的温度控制;采用定时器中断进行计时并且显示相应加热时间;利用24C02存储设定温度和动态实现时间;利用12864显示温度曲线。
一、 方案设计
1.概述
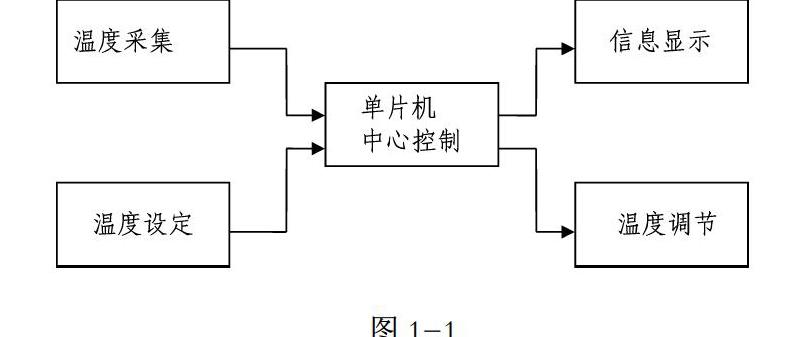
系統主要分为温度采集、温度设定、单片机控制、信息显示和温度调节五个部分,总体的系统构造如图。
2.各模块方案选择与论证
(1)单片机
采用MC9S12XS128单片机作为系统的控制核心。MC9S12XS128十六位单片机。基于S12 CPU内核,可以达到25MHz的HCS12的2-5倍性能。总线频率最高可达40 MHz。
(2)温度控制方法
1.电阻加热模块
本系统控制电阻加热采用PID控温法。PID控温法是基于经典控制理论中的PID调节器控制原理,由于其算法简单、可靠性高等优点被广泛应用工业过程控制中,尤其适用于可建立精确数学模型的确定性控制系统。采用这种方法实现的温度控制器。PID调节器模型的控制性能大大地优越于定值开关控温。并且控制器的参数可以在现场实现在线整定,因此具有较大的灵活性,可以得到较好的控制效果。
2. 风扇散热模块
风扇控制采用分段函数法。在当前温度到达设定温度时开启风扇并使其全速转动以减少超调时间,温度稳定后以原来一半的速度转动,使散热片在水泥电阻和风扇的共同作用下达到动态平衡。
(3)温度采集
DS18B20是常用的温度传感器,具有体积小,硬件开销低,抗干扰能力强,精度高的特点,但是编程较复杂,运转的速度较慢;LM35具有很高的工作精度和较宽的线性工作范围,LM35比按绝对温标校准的线性温度传感器优越行较好。从使用角度来说,LM35无需外部校准或微调,可以提供±1/4℃的常用温度精度。
选择温度传感器LM35。
(3)温度设定
选用4*4键盘输入,在程序上沿用传统的扫描思想.
(4)存储设备
选用24C02串行E2PROM作为存储器件存储设定温度,动态响应时间等信息,其具有接口方便,体积小,数据掉电不丢失等特点,在下次设备启动时从存储器中调用相关信息显示在屏幕上,并将此次运行的信息覆盖录入24C02串行E2PROM中。
(5)信息显示
1602液晶显示屏可同时显示32个字符,且其占用单片机的端口数量少,并且连线方便,拥有光标显示、闪烁、整屏移动等丰富功能,能够满足同时显示设置温度、实测温度、响应时间的要求,但不能显示曲线;12864显示功能强大,既能够显示字符又能够打点显示曲线,满足要求。
选择12864。
(6)温度调节
通过两个三极管TIP122放大驱动之后外接12V的电压分别对水泥电阻加热和驱动风扇运转。这种方法所需元器件数量多;LM298N芯片主要用于电机的控制,用来控制水泥电阻加热和风扇的转动。这种方法比较方便,电路简单,有很强的可操作性。并且可以到达额定的功率,达到快速加热的要求。
综上选择LM298N芯片驱动。
(7)滤波
为克服随机干扰造成的误差,有必要进行滤波处理。
硬件滤波,通过滤波电路对信号进行滤波,改善信号质量;数字滤波,采用平均值法来抑制有效信号中的干扰成分。
数字滤波具有简单可靠、节省硬件成本等优点,故选择数字滤波,采样102次温度数据之后去除最大值和最小值再取平均值,稳定采样环节,减少干扰引起的误差。
二、硬件系统的设计与实现
1.单片机最小系统
2.LM35测温电路
测温系统由LM35采集温度,当LM35测得温度后转化成电压信号输入到单片机.
3.温度控制系统
采用LM298N芯片进行驱动水泥电阻加热和风扇降温,电路简单。
4.温度设定与信息显示
使用4*4键盘作为录入工具,通过调用键盘扫描程序读取端口电平信息,读取输入的温度与指令.使用12864液晶显示屏显示散热片当前温度和设定温度、响应时间等.
三、软件系统的设计及实现
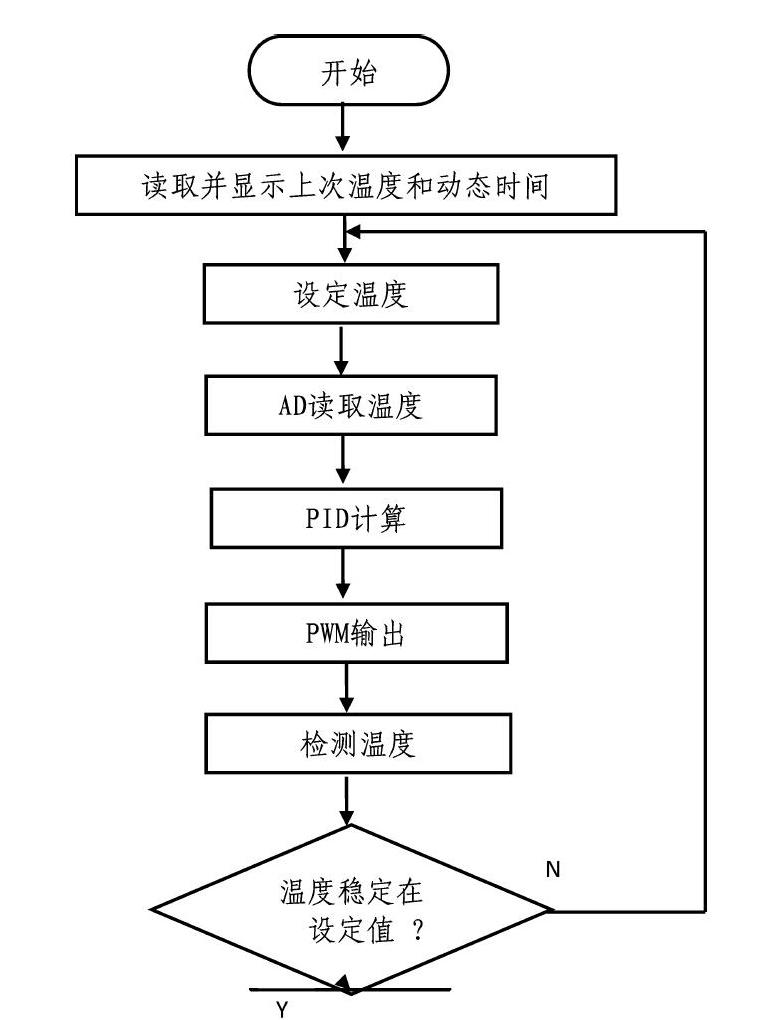
1.程序流程图
2.PID算法
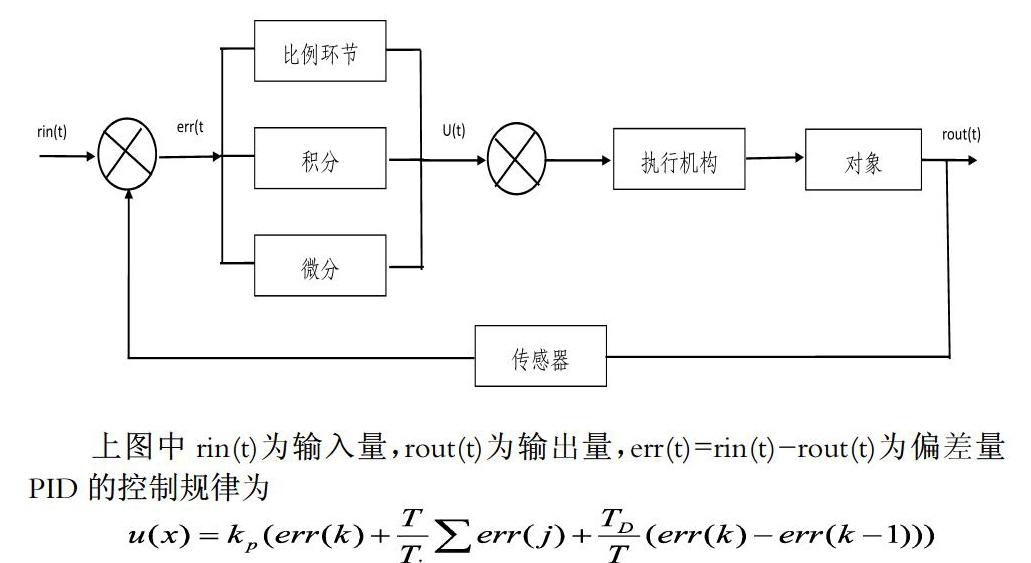
PID控制规律是调节器最常用的控制规律。PID调节器是一种线性的调节器,它根据给定值与实际输出值构成的控制偏差将偏差的比例(P)、积分(I)、微分(D)线性组合对控制对象进行控制,故称为PID调节器。PID算法的出来的占空比直接送给快速PWM波里面的参数,从而达到快速控制PWM占空比的功能。原理框如下。
上图中rin(t)为输入量,rout(t)为输出量,err(t)=rin(t)-rout(t)为偏差量PID的控制规律为
针对本控制系统我们采用变积分PID。变积分PID可以看成是积分分离的PID算法的更一般的形式。在普通的PID控制算法中,由于积分系数ki是常数,所以在整个控制过程中,积分增量是不变的。但是,系统对于积分项的要求是,系统偏差大时,积分作用应该减弱甚至是全无,而在偏差小时,则应该加强。积分系数取大了会产生超调,甚至积分饱和,取小了又不能短时间内消除静差。因此,根据系统的偏差大小改变积分速度是有必要的。变积分PID的基本思想是设法改变积分项的累加速度,使其与偏差大小相对应:偏差越大,积分越慢;偏差越小,积分越快,从而很好地吻合了系统的需求。
四、系统功能测试
经检验测试,该系统开机可以显示上次运行时信息,能够完成温控功能,可稳定在设定温度1%的误差之内,并可同时对响应时间进行计时,运行十分稳健。
猜你喜欢
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
故事大王(2017年4期)2017-05-08
现代工业经济和信息化(2016年4期)2016-05-17
汽车维护与修理(2016年3期)2016-02-28
系统医学(2016年8期)2016-02-20
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
汽车维护与修理(2014年10期)2014-02-28