电动弹跳轮式复合机器人结构设计
2016-10-21 20:58林自旺顾凯杰王经纬宋伟山梁凯旋
科学与财富 2016年9期
林自旺 顾凯杰 王经纬 宋伟山 梁凯旋
摘要:弹跳机器人可以跃过数倍于自身尺寸的障碍物,与轮式移动方式结合可以大大提高机器人的活动范围和对地形的适应能力。本文研制了一种电动弹跳和轮式移动,两种运动方式相集成的复合运动机器人。提出了一种可靠的机器人压缩和释放能量的机构。详细介绍了整个机器人的机械结构设计以及弹跳运动和轮式移动的实现。
关键词:机器人;弹跳运动;轮式移动;结构设计
0 引言
轮式移动机器人在空间探索、海洋开发、家庭应用等领域发挥着重要作用。在相对较为平坦的环境中,仅需要机器人有较为灵活的移动能力,而当遇到地形崎岖、较大障碍物或沟渠时,一般的移动机器人的运动就会受到严重的限制。在复杂的环境中,如地震救灾,机器人要有对地面较强的通过能力和对环境的适应能力。在实际的应用中,为了越过障碍物,要求机器人具有一定的跳跃能力[1~3]。
弹跳机器人可以轻而易举的越过与自身尺寸相当的,甚至数倍于自身尺寸的障碍物或沟渠,因此更适合复杂和不可预测的环境[4]。但是,单纯的机器人弹跳运动会消耗大量的能量,且元件的磨损程度会比较严重,而轮式移动可以适应相对较为平坦的地形。因此,将弹跳运动和轮式移动结合,针对不同的地形,选择适合的运动方式,既可以节省能源,延长元件使用寿命,又可以使机器人的适用范围更广泛[5]。
本文构建了一个具有跳跃能力的轮式移动机器人,该机器人是在弹跳机器人MSU jumper[6]的基础上进行了结构优化和运动方式的结合设计,采用仿生设计方法和3D打印的制造技术,实现电动弹跳与轮式集成机器人形小、质轻这一优化目标。
1复合机器人工作原理
1.1复合机器人结构组成
复合机器人结构,其弹跳机构由3部分组成:主体结构、传动部分、压缩释放机构。主体部分由上腿,下腿、压缩板和底板四部分组成,形成了六杆机构。压缩和释放机构套在传动部分的输出轴上,用以完成弹跳机构的压缩和释放动作。轮式移动部分整体是三轮式结构,包括两个前轮、两个直流减速电机和一个辅助支撑轮及其支架。同时,三轮式移动结构被选为弹跳机器人的移动平台,实现平坦路面的轮式移动功能。
1.2复合机器人的工作原理
电动弹跳轮式移动复合机器人具有两种运动方式:一种是弹跳运动方式;另一种是轮式移动方式。在工作执行开始时,机器人根据路况会进行运动方式的选择,选择情况如下:
(1)当是平坦路面时,机器人选择轮式移动运动方式,弹跳机构保持初始状态,通过机器人前轮驱动,使机器人到达工作目的地。
(2)当遇到较高障碍物时,机器人选择弹跳运动方式。经过弹跳运动,机器人完成跃过障碍物任务,并执行接下来的任务,最终达到工作目的地。
2复合机器人的结构设计
电动弹跳轮式复合机器人的设计不仅要实现弹跳高度和运动方式良好结合性的目标,而且要实现机器人微型化和重量轻的目标。
2.1弹跳机构设计
弹跳机构的设计包括三部分:六杆蓄能机构设计、传动部分设计和压缩—释放机构设计。为了简化机器人的结构,机器人弹跳主体部分选择六杆蓄能机构,而且四腿长度相等。六杆机构扭簧的压缩初始角为75°,压缩终止角为15°,压缩量为60°,为了减轻机构的整体重量,六杆蓄能机构中的上腿、下腿、压缩板和底板四部分均采用腹板—加强筋结构。传动部分选择现成的减速电机,将减速器和电机集成一体,这样不仅能够节省空间、提高效率,而且可以大大减轻机器人整体重量。减速电机的减速比为300,外置啮合齿轮组的减速比为6,总减速比为1800。同样为了减轻机器人的重量和简化机器人的结构,将压缩—释放机构两者设计为一体结构,下面主要介绍压缩、释放机构的结构和工作原理。
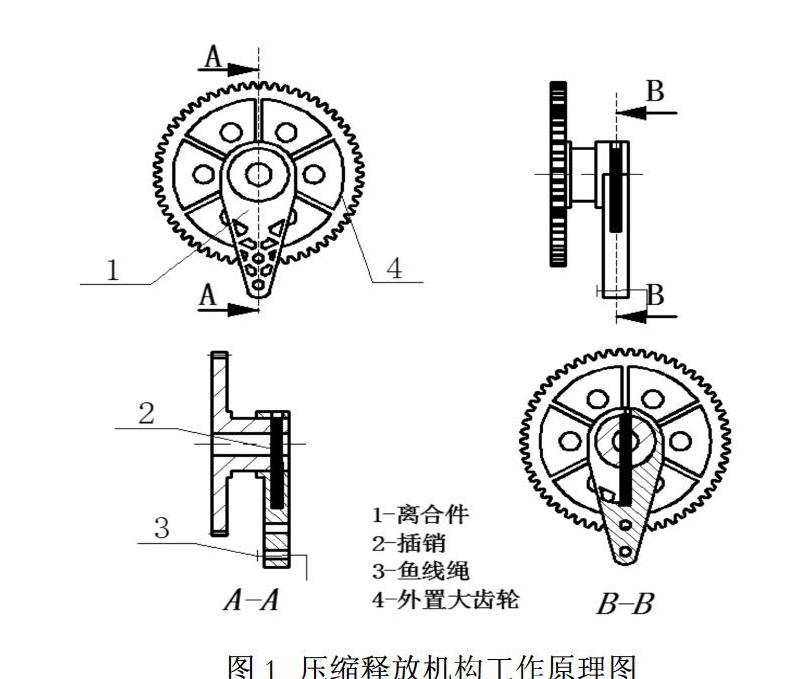
图1所示为压缩释放机构工作原理图,该结构由离合件、插销和鱼线绳三部分组成。插销1安装于传动机构的输出轴,其伸出部分位于离合件2的180°槽内,离合件安装于输出轴上,离合件的内孔和输出轴之间采用间隙配合方式。
当六杆机构压缩初始状态时,插销1与离合件2的沟槽侧面接触。压缩开始后,在传动机构的带动下,插销1带动离合件做逆时针旋转。离合机构旋转180°后,离合件2的末端上升到最高点。此时,六杆机构处于最大程度压缩状态,离合件2和插销1两者之间处于自由状态。当输出轴继续转动微小角度后,离合件2在插销1的微小干扰和鱼线绳3的拉力作用下,迅速旋转回到初始位置,从而使得弹跳机构释放能量。
插销1保证了离合件2的单向旋转,离合件2达到最高点可以在鱼线绳3的作用下短暂锁定,离合件2的180°缺口保证了突然释放。该机构改进MSU jumper的单向轴承,实现了单向轴承的功能,同时也减轻了机器人的重量。
2.2轮式移动结构设计
基于电动弹跳轮式复合机器人的稳定性和平衡性,机器人轮式移动部分整体设计成三轮结构。两前轮采用各自驱动方式,方便机器人移动的调整和转向,两前轮由两个直流减速电机驱动,车轮直接安装在减速电机的D字输出轴上。辅助支撑轮起平衡作用,维持机器人的稳定性。
3复合机器人试验分析与改进
3.1试验分析
图3.1所示为一组机器人弹跳试验结果图,在无控制系统的状态下,电源直接带动机器人电机,进行弹跳和轮式移动试验。机器人的整体重量为85g,弹跳最高高度为21cm,从压缩开始到弹跳离地的时间为4s。试验结果验证了压缩释放机构设计和轮式移动与弹跳运动结合的可行性。
同时,机器人试验结果也出现了诸多问题。弹跳结束后,机器人容易倾倒,无法恢复行走状态;机器人行走時的重心不稳;能量利用率不高。当机器人释放的过程中,能量会大量损失。
3.2复合机器人改进
基于上述分析,电动弹跳轮式复合机器人的上下两部分的质量分配可以继续优化。考虑到机器人重心不稳的问题,可以改变机器人轮式和弹跳机构的结合方式。因此,机器人可以做如下改进:
(1)选择压缩板作为机器人轮式移动平台,使得机器人上半部分分配更多重量,以减少跳跃过程的能力损失。
(2)在机器人选择轮式移动运动时,弹跳机构处于完全压缩状态,以提高机器人的稳定性。
4结语
在本次设计过程中,为了使得机器人弹跳更高、两种运动方式结合的更好,机器人的整体结构进行了很大程度的简化设计。机器人个零件采用的腹板-加强筋结构保证了机器人强度,同时减轻了机器人的整体重量。弹跳部分是机器人设计中的关键,压缩释放机构是弹跳机构的关键。相对于MUS jumper中的单向轴承方案,本次设计方案中采用的离合机构具有更高的可靠性。
猜你喜欢
建材发展导向(2023年6期)2023-03-31
房地产导刊(2022年5期)2022-06-01
建材发展导向(2021年13期)2021-07-28
金桥(2019年10期)2019-08-13
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07